图像处理之通道交换与灰度化
引言
- 此学习是基于gitnub上一个Image Processing 100 Questions,有日语等三个版本,这是英文版,讨论的是结合opencv进行图像处理问题,有python和c++,文章以c++为主。
- Image Processing指的是计算机等处理图像的一种技术,所以首先要知道图像在计算机中的存储方式。图像文件格式是记录和存储影像信息的格式。对数字图像进行存储、处理、传播,必须采用一定的图像格式,也就是把图像的像素按照一定的方式进行组织和存储,把图像数据存储成文件就得到图像文件。而图像以一个二维数组形式存储,要访问其像素点,可看如图(RGB图像中每个点(像素)由3个byte表示(红,绿,蓝或R,G,B三分量))
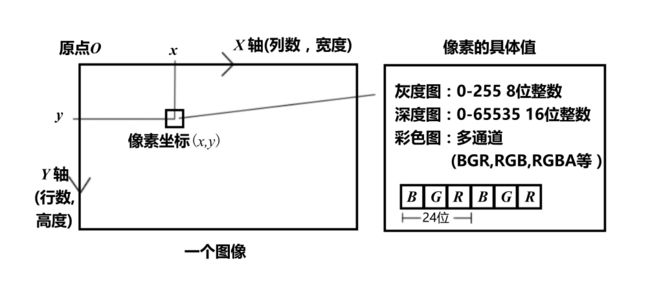
因此一张宽度为640像素,高度为480像素分辨率的灰度图就可以表示为:
unsigned char image[480][640]
像的宽度和列数,对应着 X 轴;而图像的行数或高度,则对应着它的 Y 轴。根据这种定义方式,如果我们讨论一个位于 x, y 处的像素,那么它在程序中的访问方式应该是:
unsigned char pixel = image[y][x];
- 而在我学习图形化游戏编程时,遇到一个graphic(图形)的概念,非常有趣,我觉得计算机中的图形(Graphic)和图像(Image)这篇文章为我们展现了相关概念。
1.通道交换
将计算机中图像的 RGB 通道替换成 BGR 通道。(R:red,G:green,B:blue)
以red通道为例,
//导入opencv库
#include
#include
#include
int main(int argc, const char* argv[]){
cv::Mat img = cv::imread("path", cv::IMREAD_COLOR);//运用opencv读取图像,以BGR存储,path为计算机中图片的绝对路径或者相对路径
int height = img.rows;//高为行数
int width = img.cols;//宽为列数
cv::Mat out = img.clone(); //复制定义一个图像
for (int y=0; y(y, x)[0];//定义第三个参数,并把B通道赋值
out.at(y,x)[0] = img.at(y,x)[2];//把R通道赋值给B通道
out.at(y,x)[2] = tmp;//把B通道赋值给R通道
}
}
//cv::imwrite("out.jpg", out);
cv::imshow("sample", out);
cv::waitKey(0);//窗口悬浮
cv::destroyAllWindows();//释放内存空间
return 0;
}
对于cv::Vec3b
- vector(向量): C++中的一种数据结构,确切的说是一个类.它相当于一个动态的数组,当程序员无法知道自己需要的数组的规模多大时,用其来解决问题可以达到最大节约空间的目的.
- 比如Vec
其实这句就是定义一个uchar类型的数组,长度为3而已,例如 8U 类型的 RGB 彩色图像可以使用 ,
3 通道 float 类型的矩阵可以使用 。
对于 Vec 对象,可以使用[]符号如操作数组般读写其元素,如:Vec3b color; 用 color 变量描述一种 RGB 颜色
color[0]=255; //0通道的B 分量
color[1]=0; //1通道的G 分量
color[2]=0; //2通道的R 分量 - opencv中RGB彩图通道顺序为BGR,从[0][1][2]
对于.at
- cv::mat的成员函数: .at(int y, int x)可以用来存取图像中对应坐标为(x,y)的元素坐标。
读写像素
一个RGB像素点的像素值:
Vec3f intensity = Mat.at(y,x)
float blue = intensity.val[0] //获得蓝色通道的像素值
float green = intensity.val[1] //获得绿色通道的像素值
float red = intensity.val[2] //获得红色通道的像素值
整型:
int b = srcImage.at(row, col)[0]; //获取像素值b
int g = srcImage.at(row, col)[1]; //获取像素值g
int r = srcImage.at(row, col)[2]; //获取像素值r
2. 灰度化(Grayscale)
将图像灰度化!灰度是一种图像亮度的表示方法,通过下式计算:
Y = 0.2126 R + 0.7152 G + 0.0722 B
#include 对于 CV_8UC1
矩阵数据类型:
– CV_
S = 符号整型 U = 无符号整型 F = 浮点型
CV_8UC1 是指一个8位无符号整型单通道矩阵
CV_32FC2是指一个32位浮点型双通道矩阵
CV_8UC1 CV_8SC1 CV_16U C1 CV_16SC1
CV_8UC2 CV_8SC2 CV_16UC2 CV_16SC2
CV_8UC3 CV_8SC3 CV_16UC3 CV_16SC3
CV_8UC4 CV_8SC4 CV_16UC4 CV_16SC4
CV_32SC1 CV_32FC1 CV_64FC1
CV_32SC2 CV_32FC2 CV_64FC2
CV_32SC3 CV_32FC3 CV_64FC3
CV_32SC4 CV_32FC4 CV_64FC4
其中,通道表示每个点能存放多少个数,类似于RGB彩色图中的每个像素点有三个值,即三通道的。
图片中的深度表示每个值由多少位来存储,是一个精度问题,一般图片是8bit(位)的,则深度是8.
_32FC3 CV_64FC3
CV_32SC4 CV_32FC4 CV_64FC4
其中,通道表示每个点能存放多少个数,类似于RGB彩色图中的每个像素点有三个值,即三通道的。
图片中的深度表示每个值由多少位来存储,是一个精度问题,一般图片是8bit(位)的,则深度是8.