七月算法机器学习笔记3--凸优化
这套笔记是跟着七月算法四月机器学习班的学习而记录的,主要记一下我再学习机器学习的时候一些概念比较模糊的地方,具体课程参考七月算法官网:
http://www.julyedu.com/1. 无约束优化问题
1.1 举例
首先看一个例子,

对于这个方程组,由于b=[0 1 1]' 不在系数组成的列空间内,即
![]()
因此,这个方程没有解。但是,是否可以找到一个近似解。即

可得:

其最小值为 0.038;
1.2 无约束优化问题

在下方平面的部分叫做等高线。表示三维空间中所有的横切面(俯视图)构成的集合。
1.3优化问题中可能的极值点:
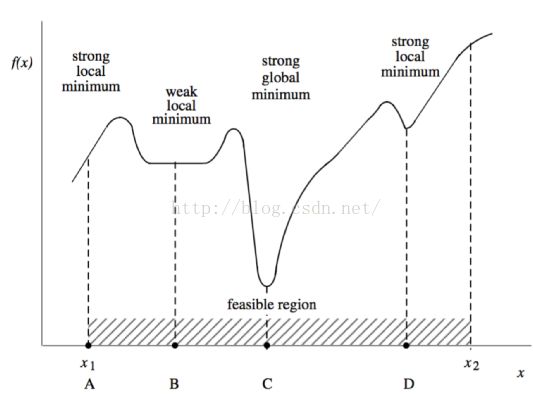
这里,C点是这个区域的最小值点,B,D为局部最小值点。A,C为局部最大值点
还有一种点,叫拐点,它的一阶导数为0,但是并非极值点。
1.4 梯度和Hessian矩阵

对函数的每一个变量求偏导数
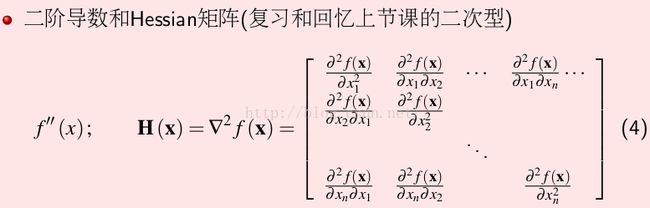
H为一个对称矩阵。Hession矩阵的特征值大于0.
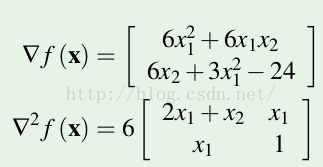
Hessian矩阵举例
对函数
![]()
求导数
1.5 泰勒级数展开(标量)

因为后面的导数比较小,可以忽略

为什么在函数可导的情况下,极值点的一阶导数一定为0?
这里,假设![]() 取值在
取值在![]() 的周围。上述泰勒展开式的最后一项就可以去掉。则原始变为
的周围。上述泰勒展开式的最后一项就可以去掉。则原始变为
![]()
这时,要让![]() 为最小值点,即
为最小值点,即![]() 无论取正取负(简单理解就是
无论取正取负(简单理解就是![]() 无论在
无论在![]() 的左侧还是右侧),左式都要大于右式,这时,只有一阶导为0才能满足条件。
的左侧还是右侧),左式都要大于右式,这时,只有一阶导为0才能满足条件。
为什么一阶导数为0,二阶导数>0就是严格的局部极小值点?
考虑式

这里,一阶导数已经为0. 二阶导数为正,因此,左式大于![]() (这么想,
(这么想,![]() 加一个正数约等于左式),相对于邻居的点最小,所以
加一个正数约等于左式),相对于邻居的点最小,所以![]() 为局部最小值点。
为局部最小值点。
二阶导数为0,可能为鞍点。以x^3为例, 其一阶,二阶导数均为0,则要从更高阶取判断,三阶导数不为0则其正负与![]() 的正负有关。x^3在0点是个拐点。
的正负有关。x^3在0点是个拐点。
泰勒级数展开(矢量)

其判断与标量一致

此处的0为向量,
如果一阶梯度为0, hessian矩阵正定即为严格局部最小值。
泰勒级数矢量更高阶阶的叫张量。
1.6 级值判断举例
![]()
求导数
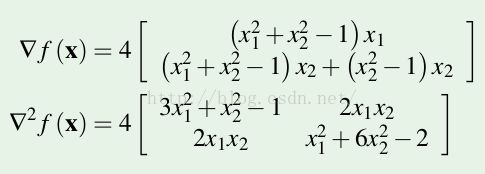
得到
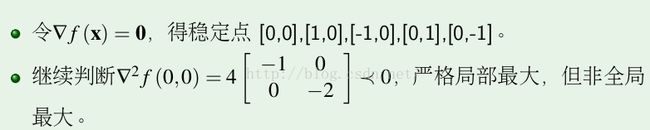

该函数如图所示:

1.7 无约束的优化问题的局限:
a. 函数不可导;
b.可导,但是变量太多无法求解;
c. 解可能是一个集合。
1.8 无约束优化迭代法
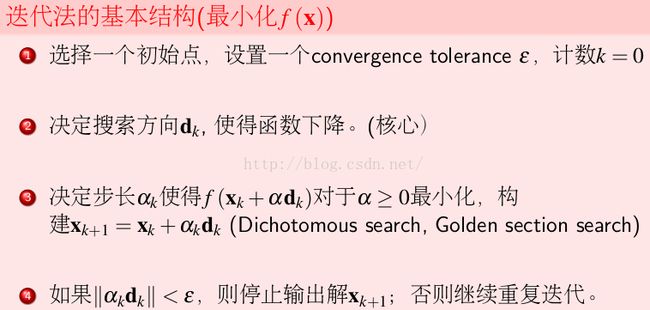
各种迭代法最主要的不同点就是第二步,d方向的不同
1.8.1 深度下降法:

首先,d为什么取负梯度方向?
在上式中,目的要使得![]() 比
比![]() 小,那么,下降最快的的方式就是使得一阶导数
小,那么,下降最快的的方式就是使得一阶导数![]() 与
与![]() 两个向量的夹角为180度(
两个向量的夹角为180度(![]() 等于
等于![]() ),向量内积的公式|a||b|cos(t); 沿着负梯度方向下降最快。
),向量内积的公式|a||b|cos(t); 沿着负梯度方向下降最快。
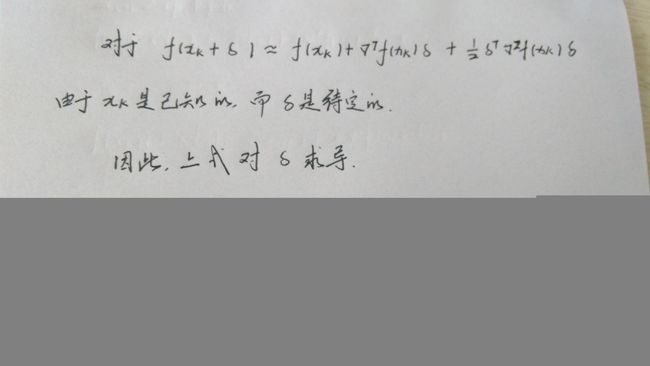
1.8.2 牛顿法

在梯度下降法中,我们没有计算二阶导数,而在牛顿法中,加入了Hessian矩阵。
对于d的值,给出求解方法:
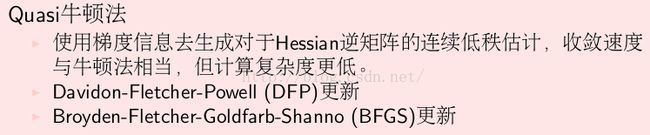
由于牛顿法涉及到hessian矩阵的求逆,但是Hessian未必可逆;
1.8.2 拟牛顿法
2. 有约束的优化问题
2.1 约束优化问题的一般形式:

这里,约束条件有等式,也有不等式。即要满足f(x),也要满足约束条件。

可行域上的最优解一定会碰到一个边界。即至少有一个c (x) = 0;
举例:

如下图:
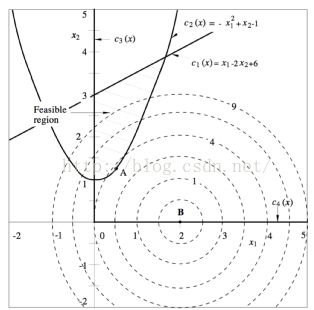
在约束条件下,可行域围成的区间为抛物线以上,直线一下的那部分区域。最优解必须在可行域中。
最优解为A点。最优解会碰到c2边界。
2.2 KKT 一般限制优化问题极值点一阶必要条件
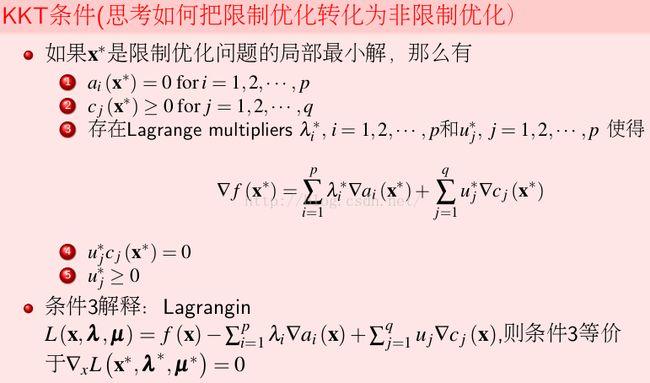
KKT条件可以求局部最优解,在凸函数下可以得到全局最优解
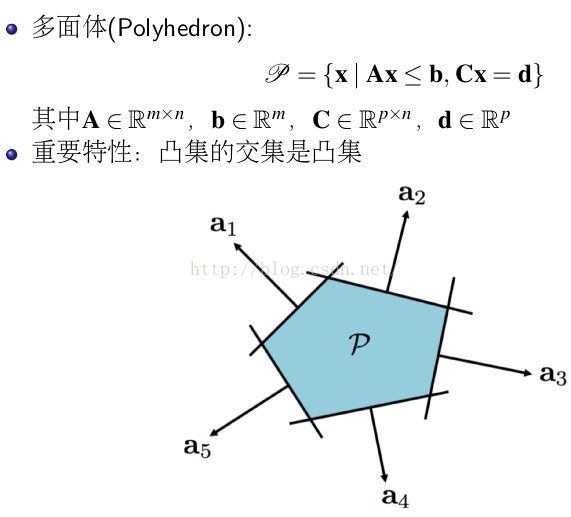
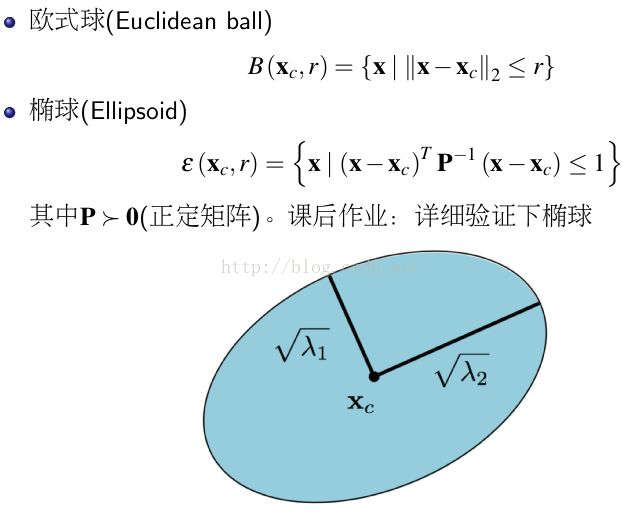
2.3 凸集

举例:
常见的凸集:
2.4 凸函数

几何解释:

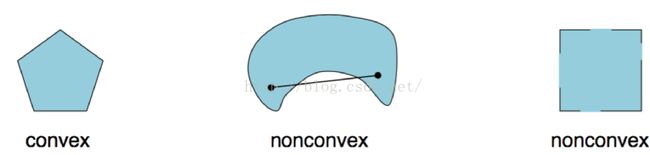
2.5 凸函数和非凸函数直观比较
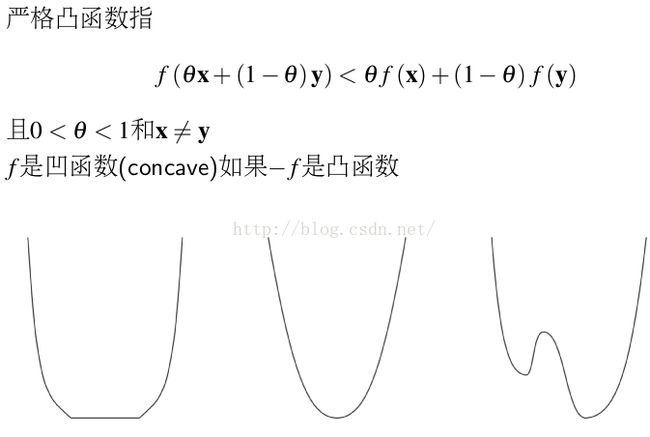
如第一幅图是凸函数,但是不是严格的图函数。
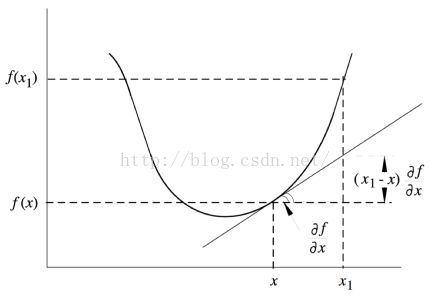
凸函数的一阶二阶条件
一阶充要条件

几何解释:
二阶充要条件
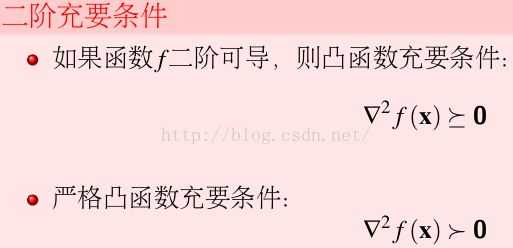
![]()
2.6 凸函数和凸集的关系
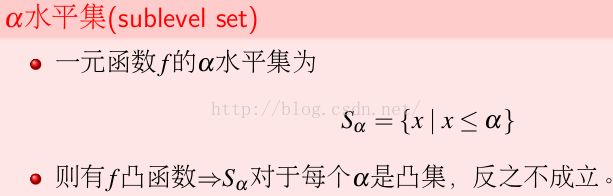
比如:
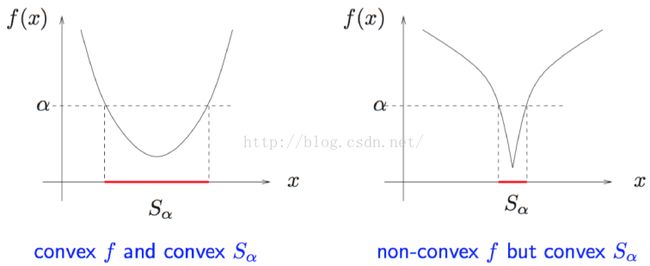
第二种情况叫做拟凸函数
2.7 凸优化问题标准形式
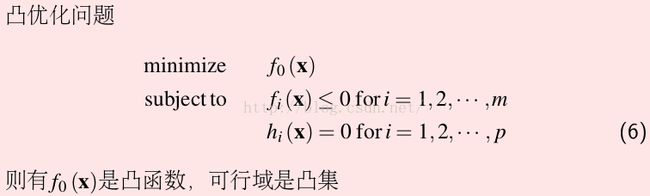
对于凸优化问题,简单问题可以用KKT求解,复杂问题可以用梯度下降,拟牛顿问题求解。
但是在实际中,很多问题是非凸的。对于非凸问题,可以通过求其近似的凸优化问题的解作为其初始解,这样会比随机初始化效果好很多。
有些问题在当前维度为非凸,但是在更高的维度上是凸的。
参考资料:
七月算法:机器学习四月班:http://www.julyedu.com/
图片来自于课程PPT