Pytorch 循环神经网络 nn.RNN() nn.RNNCell() nn.Parameter()不同方法实现
文章目录
- RNN
- 网络结构
- 关键公式
- 网络维度
- nn.RNN
- nn.RNNCell
- GRU
- 网络结构
- 关键公式
- 网络维度
- nn.GRU
- nn.Parameter定义网络
- LSTM
- 网络结构
- 关键公式
- nn.LSTM
RNN
网络结构
一个典型的单层RNN网络,结果如下所示。其实很简单就是一个神经元(蓝色模块),针对时序输入信号分别输入网络中,网络再每个时序进行输出,其中通过一个状态量记录时序信息。
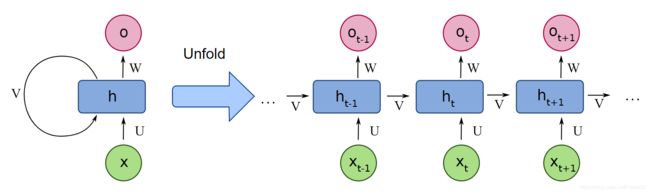
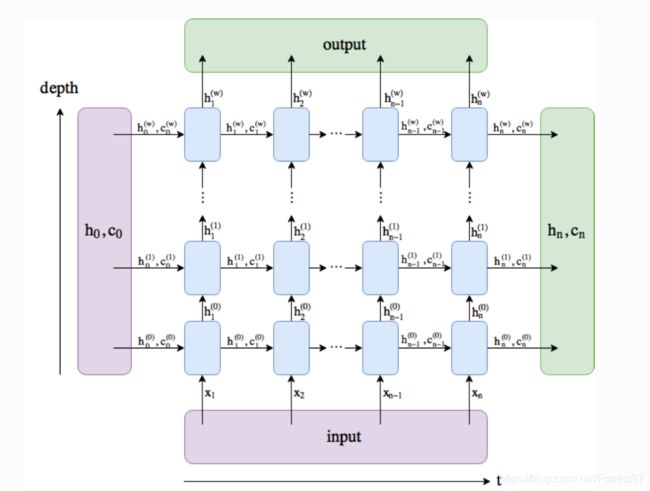
多层的RNN,上一次的输出ht是下一层的输入。
关键公式
RNN的关键特点隐层状态变量 H t \boldsymbol{H}_{t} Ht,用于存储时序信息。
H t = ϕ ( X t W x h + H t − 1 W h h + b h ) \boldsymbol{H}_{t}=\phi\left(\boldsymbol{X}_{t} \boldsymbol{W}_{x h}+\boldsymbol{H}_{t-1} \boldsymbol{W}_{h h}+\boldsymbol{b}_{h}\right) Ht=ϕ(XtWxh+Ht−1Whh+bh)
O t = H t W h q + b q \boldsymbol{O}_{t}=\boldsymbol{H}_{t} \boldsymbol{W}_{h q}+\boldsymbol{b}_{q} Ot=HtWhq+bq
多数网络会直接所有时序的 H \boldsymbol{H} H作为输出
网络维度
输入数据 X \boldsymbol{X} X维度表示[seq len, batch, h dim] =>[序列长度,batch, 序列的表示维度]=> [单词数, 句子数, 词维度]
刚开始接触RNNN会觉得这个输入形式有点怪,
为什么batch维不是在0维度上。这里需要理解RNN的运算特点,RNN网络每次送入的数据 X t \boldsymbol{X}_{t} Xt维度恰好就是[b, h dim],循环送入seq len次。
X t \boldsymbol{X}_{t} Xt:维度[bath, h_dim]
W x h \boldsymbol{W}_{x h} Wxh:维度[h_dim, hidden_len]
H t − 1 \boldsymbol{H}_{t-1} Ht−1:维度[batch, hidden_len]
W h h \boldsymbol{W}_{h h} Whh:维度[hidden_len, hidden_len]
b h \boldsymbol{b}_{h} bh:维度[hidden_len]
H t \boldsymbol{H}_{t} Ht:维度[batch, hidden_len]
W h q \boldsymbol{W}_{h q} Whq:维度[hidden_len, hidden_len]
b q \boldsymbol{b}_{q} bq:维度[hidden_len]
O t \boldsymbol{O}_{t} Ot:维度[batch, hidden_len]
nn.RNN
构建一个 h_dim=10, hidden_len=20的2层RNN网络,同时我们打印出网络中的权重和偏差,以及shape
import torch
from torch import nn
from torch.nn import functional as F
rnn = nn.RNN(input_size=10, hidden_size=20, num_layers=2)
print(rnn._parameters.keys())
print(rnn.weight_ih_l0.shape)
print(rnn.weight_hh_l0.shape)
print(rnn.bias_ih_l0.shape)
print(rnn.bias_hh_l0.shape)
odict_keys([‘weight_ih_l0’, ‘weight_hh_l0’, ‘bias_ih_l0’, ‘bias_hh_l0’, ‘weight_ih_l1’, ‘weight_hh_l1’, ‘bias_ih_l1’, ‘bias_hh_l1’])
torch.Size([20, 10])
torch.Size([20, 20])
torch.Size([20])
torch.Size([20])
可见Torch的RNN模型与表达式 H t = ϕ ( X t W x h + H t − 1 W h h + b h ) \boldsymbol{H}_{t}=\phi\left(\boldsymbol{X}_{t} \boldsymbol{W}_{x h}+\boldsymbol{H}_{t-1} \boldsymbol{W}_{h h}+\boldsymbol{b}_{h}\right) Ht=ϕ(XtWxh+Ht−1Whh+bh)中的W和b完全对应,其中末尾的l0和l1表示layer层数编号。维度也刚好符合之前的推导。
对于nn.RNN的实例化对象rnn,输入包括输入input_tensor,以及初始h0(可省略,torch能根据网络参数和输入数据的shape添加)
# 可理解为一个字串长度为5, batch size为3, 字符维度为10的输入
input_tensor = torch.randn(5, 3, 10)
# 两层RNN的初始H参数,维度[layers, batch, hidden_len]
h0 = torch.randn(2, 3, 20)
# output_tensor最后一层所有状态的输出, hn表示两层最后一个时序的状态输出
output_tensor, hn =rnn(input_tensor, h0)
print(output_tensor.shape, hn.shape)
print(output_tensor[-1][0], hn[-1][0])
torch.Size([5, 3, 20]) torch.Size([2, 3, 20])
tensor([-0.1818, 0.1286, -0.5069, -0.1739, -0.0189, -0.2936, 0.1807, -0.0592,
-0.4181, 0.0081, 0.4464, 0.0563, -0.6201, -0.6069, 0.3506, 0.3821,
0.0785, 0.3340, -0.2924, -0.0178], grad_fn=)
tensor([-0.1818, 0.1286, -0.5069, -0.1739, -0.0189, -0.2936, 0.1807, -0.0592,
-0.4181, 0.0081, 0.4464, 0.0563, -0.6201, -0.6069, 0.3506, 0.3821,
0.0785, 0.3340, -0.2924, -0.0178], grad_fn=)
可见input_tensor和output_tensor的shape相同,h0和hn的shape相同
且out_put_tensor的最后时序与hn的最后一层相同。
nn.RNNCell
也可以使用nn.RNNCell的API实现对多层的RNN网络每一层的Cell进行建模。
import torch
from torch import nn
from torch.nn import functional as F
rnn = nn.RNN(input_size=10, hidden_size=20, num_layers=2)
input_tensor = torch.randn(5, 3, 10)
h0 = torch.zeros(2, 3, 20)
output_tensor, hn =rnn(input_tensor, h0)
cell1 = nn.RNNCell(input_size=10, hidden_size=20)
# 多层的RNNCell input_size=hidden_len
cell2 = nn.RNNCell(input_size=20, hidden_size=20)
h1 = torch.zeros(3, 20)
h2 = torch.zeros(3, 20)
cell_out=[]
for xt in input_tensor:
h1 = cell1(xt, h1)
h2 = cell2(h1, h2)
cell_out.append(h2)
print(hn.shape, h2.shape)
print(hn[-1][0], h2[0])
- 这里的发现相同的输入情况下,两种模型参数的输出不同,推测可能与网络初始化参数不同引起
GRU
门控循环单元(gated recurrent, GRU)引入了重置门(reset gate)和更新门(update gate)
网络结构

关键公式
重置门 R t \boldsymbol{R}_{t} Rt和更新门 Z t \boldsymbol{Z}_{t} Zt计算
R t = σ ( X t W x r + H t − 1 W h r + b r ) Z t = σ ( X t W x z + H t − 1 W h z + b z ) \begin{array}{l} \boldsymbol{R}_{t}=\sigma\left(\boldsymbol{X}_{t} \boldsymbol{W}_{x r}+\boldsymbol{H}_{t-1} \boldsymbol{W}_{h r}+\boldsymbol{b}_{r}\right) \\ \boldsymbol{Z}_{t}=\sigma\left(\boldsymbol{X}_{t} \boldsymbol{W}_{x z}+\boldsymbol{H}_{t-1} \boldsymbol{W}_{h z}+\boldsymbol{b}_{z}\right) \end{array} Rt=σ(XtWxr+Ht−1Whr+br)Zt=σ(XtWxz+Ht−1Whz+bz)
候选隐藏状态 H ~ t \tilde{\boldsymbol{H}}_{t} H~t计算
H ~ t = tanh ( X t W x h + ( R t ⊙ H t − 1 ) W h h + b h ) \tilde{\boldsymbol{H}}_{t}=\tanh \left(\boldsymbol{X}_{t} \boldsymbol{W}_{x h}+\left(\boldsymbol{R}_{t} \odot \boldsymbol{H}_{t-1}\right) \boldsymbol{W}_{h h}+\boldsymbol{b}_{h}\right) H~t=tanh(XtWxh+(Rt⊙Ht−1)Whh+bh)
X t \boldsymbol{X}_{t} Xt是当前序列信息网络的唯一途径。当重置门 R t \boldsymbol{R}_{t} Rt接近0,丢弃上一个时间的隐藏状态 H t − 1 \boldsymbol{H}_{t-1} Ht−1,反之当重置门 R t \boldsymbol{R}_{t} Rt接近1,保留上一个时间的隐藏状态 H t − 1 \boldsymbol{H}_{t-1} Ht−1。
重置门有助于捕捉时间序列里短期的依赖关系
隐藏状态 H t \boldsymbol{H}_{t} Ht计算
H t = Z t ⊙ H t − 1 + ( 1 − Z t ) ⊙ H ~ t \boldsymbol{H}_{t}=\boldsymbol{Z}_{t} \odot \boldsymbol{H}_{t-1}+\left(1-\boldsymbol{Z}_{t}\right) \odot \tilde{\boldsymbol{H}}_{t} Ht=Zt⊙Ht−1+(1−Zt)⊙H~t
当更新门 Z t \boldsymbol{Z}_{t} Zt接近1,候选状态 H ~ t \tilde{\boldsymbol{H}}_{t} H~t无法传入更新隐藏状态 H t \boldsymbol{H}_{t} Ht,即当 Z t \boldsymbol{Z}_{t} Zt接近1可以控制 H t \boldsymbol{H}_{t} Ht更新,实现对较早隐藏状态的有效保持作用。
更新门有助于捕捉时间序列里长期的依赖关系
网络维度
X t \boldsymbol{X}_{t} Xt:维度[bath, h_dim]
W x r \boldsymbol{W}_{x r} Wxr:维度[h_dim, hidden_len]
W x z \boldsymbol{W}_{x z} Wxz:维度[h_dim, hidden_len]
W x h \boldsymbol{W}_{x h} Wxh:维度[h_dim, hidden_len]
H t − 1 \boldsymbol{H}_{t-1} Ht−1:维度[batch, hidden_len]
W h r \boldsymbol{W}_{h r} Whr:维度[hidden_len, hidden_len]
W h z \boldsymbol{W}_{h z} Whz:维度[hidden_len, hidden_len]
W h h \boldsymbol{W}_{h h} Whh:维度[hidden_len, hidden_len]
H t \boldsymbol{H}_{t} Ht:维度[batch, hidden_len]
nn.GRU
同样,构建一个 h_dim=10, hidden_len=20的2层RNN网络,同时我们打印出网络中的权重和偏差,以及shape
gru = nn.GRU(input_size=10, hidden_size=20, num_layers=2)
print(gru._parameters.keys())
print(gru.weight_ih_l0.shape)
print(gru.weight_hh_l0.shape)
odict_keys([‘weight_ih_l0’, ‘weight_hh_l0’, ‘bias_ih_l0’, ‘bias_hh_l0’, ‘weight_ih_l1’, ‘weight_hh_l1’, ‘bias_ih_l1’, ‘bias_hh_l1’])
torch.Size([60, 10])
torch.Size([60, 20])
这里我们可以看出网络的关键参数在网络中跟RNN的权重参数名相同只有weight_ih和weight_hh,但是在size上可以看出端倪。
weight_ih的维度恰好是 W x r \boldsymbol{W}_{x r} Wxr, W x z \boldsymbol{W}_{x z} Wxz, W x h \boldsymbol{W}_{x h} Wxh在0维上的堆叠。
# 可理解为一个字串长度为5, batch size为3, 字符维度为10的输入
input_tensor = torch.randn(5, 3, 10)
# 两层RNN的初始H参数,维度[layers, batch, hidden_len]
h0 = torch.randn(2, 3, 20)
# output_tensor最后一层所有状态的输出, hn表示两层最后一个时序的状态输出
output_tensor, hn =rnn(input_tensor, h0)
print(output_tensor.shape, hn.shape)
print(output_tensor[-1][0], hn[-1][0])
torch.Size([5, 3, 20]) torch.Size([2, 3, 20])
tensor([-0.4143, -0.1336, 0.0865, 0.0401, -0.3132, 0.3051, 0.0650, -0.1396,
-0.2653, -0.2919, 0.1540, -0.3338, 0.0277, -0.3881, 0.4366, -0.2255,
-0.0051, -0.0046, -0.1863, -0.2611], grad_fn=) tensor([-0.4143, -0.1336, 0.0865, 0.0401, -0.3132, 0.3051, 0.0650, -0.1396,
-0.2653, -0.2919, 0.1540, -0.3338, 0.0277, -0.3881, 0.4366, -0.2255,
-0.0051, -0.0046, -0.1863, -0.2611], grad_fn=)
网络的输出形式同RNN
nn.Parameter定义网络
跟进一步我们玩一个更底层,自己定义参数运算实现一个rnn函数
device = None
input_size, hidden_size = 10, 20
input_tensor = torch.randn(5, 3, 10)
h0 = torch.zeros((3, 20), device=device)
def get_params():
def _one(shape):
ts = torch.tensor(np.random.normal(0, 0.01, size=shape), device=device, dtype=torch.float32)
return torch.nn.Parameter(ts, requires_grad=True)
# 隐藏层参数
W_xh = _one((input_size, hidden_size))
W_hh = _one((hidden_size, hidden_size))
b_h = torch.nn.Parameter(torch.zeros(hidden_size, device=device, requires_grad=True))
# 输出层参数
W_hq = _one((hidden_size, input_size))
b_q = torch.nn.Parameter(torch.zeros(input_size, device=device, requires_grad=True))
return nn.ParameterList([W_xh, W_hh, b_h, W_hq, b_q])
def rnn(inputs, state, params):
# inputs和outputs皆为num_steps个形状为(batch_size, vocab_size)的矩阵
W_xh, W_hh, b_h, W_hq, b_q = params
H = state
outputs = []
for X in inputs:
H = torch.tanh(torch.matmul(X, W_xh) + torch.matmul(H, W_hh) + b_h)
Y = torch.matmul(H, W_hq) + b_q
outputs.append(Y)
return outputs, H
params = get_params()
outputs, state_new = rnn(input_tensor, h0, params)
print(len(outputs), outputs[0].shape, state_new[0].shape)
LSTM
网络结构
关键公式
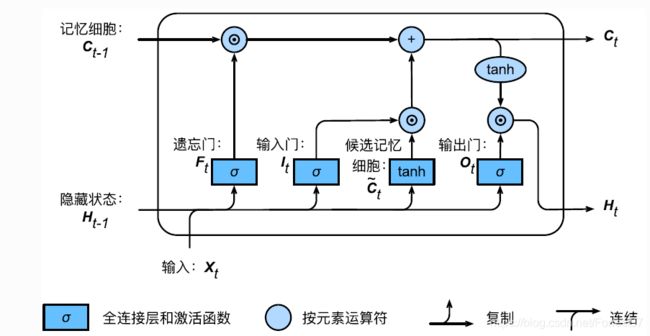
LSTM一共有三个门控单元,分别是: 输入门 I t \boldsymbol{I}_{t} It,遗忘门 F t \boldsymbol{F}_{t} Ft,输出门 O t \boldsymbol{O}_{t} Ot,计算如下
I t = σ ( X t W x i + H t − 1 W h i + b i ) F t = σ ( X t W x f + H t − 1 W h f + b f ) O t = σ ( X t W x o + H t − 1 W h o + b o ) \begin{aligned} \boldsymbol{I}_{t} &=\sigma\left(\boldsymbol{X}_{t} \boldsymbol{W}_{x i}+\boldsymbol{H}_{t-1} \boldsymbol{W}_{h i}+\boldsymbol{b}_{i}\right) \\ \boldsymbol{F}_{t} &=\sigma\left(\boldsymbol{X}_{t} \boldsymbol{W}_{x f}+\boldsymbol{H}_{t-1} \boldsymbol{W}_{h f}+\boldsymbol{b}_{f}\right) \\ \boldsymbol{O}_{t} &=\sigma\left(\boldsymbol{X}_{t} \boldsymbol{W}_{x o}+\boldsymbol{H}_{t-1} \boldsymbol{W}_{h o}+\boldsymbol{b}_{o}\right) \end{aligned} ItFtOt=σ(XtWxi+Ht−1Whi+bi)=σ(XtWxf+Ht−1Whf+bf)=σ(XtWxo+Ht−1Who+bo)
跟GRU相似LSTM存在一个候选记忆状态 C ~ t \tilde{\boldsymbol{C}}_{t} C~t
C ~ t = tanh ( X t W x c + H t − 1 W h c + b c ) \tilde{\boldsymbol{C}}_{t}=\tanh \left(\boldsymbol{X}_{t} \boldsymbol{W}_{x c}+\boldsymbol{H}_{t-1} \boldsymbol{W}_{h c}+\boldsymbol{b}_{c}\right) C~t=tanh(XtWxc+Ht−1Whc+bc)
记忆状态 C t \boldsymbol{C}_{t} Ct
C t = F t ⊙ C t − 1 + I t ⊙ C ~ t \boldsymbol{C}_{t}=\boldsymbol{F}_{t} \odot \boldsymbol{C}_{t-1}+\boldsymbol{I}_{t} \odot \tilde{\boldsymbol{C}}_{t} Ct=Ft⊙Ct−1+It⊙C~t
遗忘门用于控制上一步的记忆状态,输入门控制候选记忆状态。
当 F t = 1 \boldsymbol{F}_{t}=1 Ft=1, I t = 0 \boldsymbol{I}_{t}=0 It=0时,新的信息无法进入,记忆状态将一直保存之前的的状态,因此很多人将遗忘门等于1定义为记忆门。
隐藏状态 H t \boldsymbol{H}_{t} Ht
H t = O t ⊙ tanh ( C t ) \boldsymbol{H}_{t}=\boldsymbol{O}_{t} \odot \tanh \left(\boldsymbol{C}_{t}\right) Ht=Ot⊙tanh(Ct)
输出门 O t \boldsymbol{O}_{t} Ot就更加直观了,负责记忆状态是否输出隐藏状态 H t \boldsymbol{H}_{t} Ht
nn.LSTM
rnn = nn.LSTM(input_size=10, hidden_size=20, num_layers=2)
print(rnn._parameters.keys())
print(rnn.weight_ih_l0.shape)
print(rnn.weight_hh_l0.shape)
odict_keys([‘weight_ih_l0’, ‘weight_hh_l0’, ‘bias_ih_l0’, ‘bias_hh_l0’, ‘weight_ih_l1’, ‘weight_hh_l1’, ‘bias_ih_l1’, ‘bias_hh_l1’])
torch.Size([80, 10])
torch.Size([80, 20])
由于多了一个门控单元,0维度上又堆叠了一个hidden len
模型
input_tensor = torch.randn(5, 3, 10)
output_tensor, hn =rnn(input_tensor)
代码参考
https://github.com/ShusenTang/Dive-into-DL-PyTorch