论文Real-Time Lane and Obstacle Detection on the global System
abstract
GOLD (Generic Obsta- cle and Lane Detection) system
The GOLD system addresses both lane detection and obstacle detection at the same time
它既可以
- 检测一般性障碍物(对对称性或形状没有限制),
- 也可以检测结构化环境中的车道位置(带有涂漆的车道标记)。
- 它已在PAPRICA系统上实现,工作频率为10 Hz
1 Introduction
GOLD系统同时处理车道检测和障碍物检测:
车道检测基于模式匹配技术,该技术依赖于道路标记的存在,
虽然通过处理成对的立体图像来对车辆前方的障碍物进行定位:为了在摄像头校准和车辆运动方面快速而稳健地进行,
通用障碍物的检测被简化为无需任何3D worldreconstruction即可确定车辆前方的自由空间[8]
两种功能均采用相同的基础方法(逆向透视图[9]),该方法基于平坦道路的假设。 这种技术基于一种变换,在给定车辆前方道路模型(例如平坦道路)的情况下,将两个图像重新映射到一个新的域(路域)中,在此过程中,以下处理得到了极大简化。 变换导致消除了透视效果,因此每个像素代表道路的同一部分。 这样,车道标记在整个图像中具有恒定的宽度,从而简化了其检测。 在立体图像上使用图像变形可以检测到从路面升起的任何物体。 此外,由于两个GOLD功能都基于重新映射到同一域(地平面)中的图像处理,因此两个独立处理结果的融合非常简单。
这项工作的组织方式如下:第2节介绍了用于从单眼图像中消除透视效果的方法的基础及其在处理立体图像中的应用。 第3节介绍了如何执行车道检测,而第4节介绍了障碍物检测。 第5节介绍了硬件体系结构,第6节介绍了实现和性能。 第7节在本文结尾处简要讨论了结果
2 The Underlying Approach 基础方法
逆透视图映射(IPM)是一项成熟的技术[2,10,12,14,15],当完全了解采集参数(相机位置,方向,光学元件等)时,可以消除透视效果。 以及关于道路的知识(例如ajat道路假设)。 旨在消除透视效果的过程将对输入图像进行重新采样,将每个像素重新映射到不同的位置,并生成一个新的二维像素阵列。 最终图像代表了车辆前方道路区域的俯视图,因为它是从相当高的高度观察到的。 相机获取的图像及其重新映射如图1所示,其中还给出了两个坐标系之间的关系

显然,由于在重新映射的图像中车道标记具有恒定的宽度,因此即使在诸如阴影的存在等关键条件下,也可以进行车道检测[3]。
另一方面,立体图像的重新映射可以传递有关高架障碍物或通常道路不平坦部分的信息。


Lane Detection
1、利用二值图检测车道
在给定的水平距离上,属于道路标记的像素的亮度值高于其左,右邻居。
因此,道路标记检测的第一阶段:基于水平黑,白,黑过渡的直线确定。 基于水平亮度梯度的滤波器用于计算阈值图像,
图2.b和2.c显示了对应于图2.a的重新映射和阈值图像。
连续中级处理的目标是从阈值图像开始确定道路的几何形状。 逐行扫描此二进制图像,并且对于每行,将其所有非零像素均视为一对。 两个非零像素可以代表三种不同的道路配置,具体取决于它们可能具有的含义:左边缘,中心线,右边缘
左边缘,中心线,右边缘每一种都会产生一对(ci,wi,),
其中ci代表道路中间轴的坐标
wi代表其对应的车道宽度。
无论如何,并非所有对(ci,wi)都对应于有效的道路配置,并且仅考虑满足以下约束的对:
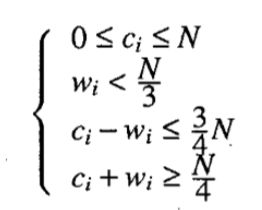
其中N是图像水平尺寸。
在考虑图像的每一行的wi参数假定的所有值的情况下构建直方图,其中直方图的峰值对应于车道宽度的更频繁的值。为了允许非固定的道路几何形状(以及曲线的处理),对直方图进行低通滤波;最终检测出其最大值W。

从图像的底部(最有可能成功检测到道路中心)到顶部逐行扫描图像,并利用图像垂直相关性构建最长的道路中心链。
然后,将与上述链的中心ci相对应的wi值用于重构道路几何形状。图2.d显示了从图2.a所示的原始图像开始的最终结果。此外,出于显示目的,可以使用IPM的双重变换重新引入透视效果:图2.e将其最终的叠加表示在原始图像上。
Obstacle Detection
由于假定道路平坦,因此IPM算法可用于生成代表从顶部看的道路的图像。 通过在立体图像上使用带有适当参数的IPM算法,可以获得两个不同的路面斑块。 此外,对整个视觉系统参数的了解可以使这两个路标相互对应。 这意味着在两个重新映射的图像中具有相同图像坐标的像素对代表道路平面中的同一点。
因此,可以通过计算两个重新映射的图像之间的差异来验证平坦道路假设:如果差异图像呈现出足够大的非零像素簇,则可以检测到任何从道路上抬起的东西。
此外,很容易证明,通用障碍物的垂直边缘被映射为两条直线,这些直线与摄像机在道路平面上的投影相交。 由于两个摄像机的投影坐标不同,在理想情况下,两个重新映射的图像之间的差异会显示两个三角形(请参见图3)。
不幸的是,在实际情况下,由于纹理,不规则形状以及障碍物的亮度不均匀,三角形的检测和定位变得困难。
然而,在差分图像的计算中,无论如何都可以识别出一些具有准三角形形状的像素簇。
因此,处理的低级部分被减小为两个重新映射的图像之间的差异,阈值和旨在去除阈值图像中小尺寸细节的简单形态学开口[7]。
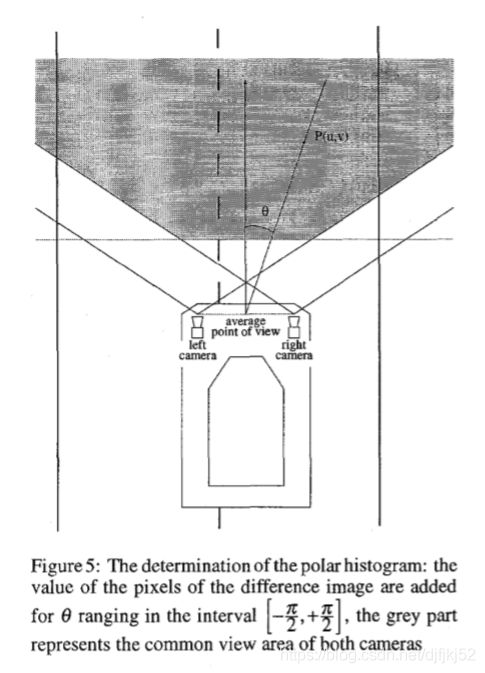
极坐标直方图用于检测三角形:给定道路平面上的点F(称为焦点),则计算极坐标直方图,扫描差异图像并计算源自于每条直线的阈值像素数焦点F.
如果F位于三角形边缘的延长线上,则极坐标直方图会显示出急剧的不连续性。
因此,如果将F放置在两个摄像机的投影之间的中间点(如图5所示),则极坐标直方图会显示一个与每个三角对应的明显峰值。图4.a和4.b显示了两个障碍物的左视图和右视图,图4.c和4.d显示了左右重新映射的立体图像,而差异图像显示在图4.e中,而图4.f显示了相应的极坐标直方图。

此外,可以根据不同的标准,例如相似的幅度,接近度或清晰度,将两个或多个峰连接起来。峰的幅度和宽度以及连接的峰之间的间隔用于确定可以看到整个障碍物的视角。
差异图像还可用于估计障碍物距离。对于极坐标直方图的每个峰,计算径向直方图,以扫描差异图像的特定扇区。
径向直方图分析的目的是检测代表障碍物和道路平面之间接触点的三角形的角,从而确定障碍物的距离。进一步的细节可以在[5]中找到。
结论
这项工作的主要创新贡献是使用IPM技术简化了中低级别的处理步骤