LQR轨迹跟踪算法Python算法实现3
根据LQR轨迹跟踪算法Python/Matlab算法实现2的代码,我们转化成Python,后续上车使用。代码仅开源到这,可以进行仿真,函数都可以直接使用。工程代码就不开源了。
from numpy import *
from math import *
import matplotlib.pyplot as plt
import scipy.linalg as la
import time
Kp = 1
dt = 0.1
L = 2.9
Q = eye(4)
Q[0,0] = 19.7
Q[1,1] =0.01
Q[2,2] = 18.3
Q[3,3] = 7.3
R = 1
max_steer =60 * pi/180#in rad
target_v =10.0 / 3.6
cx = linspace(0,200,2000)
cy = zeros(len(cx))
pd= zeros(len(cx))
pdd = zeros(len(cx))
ck = zeros(len(cx))
cyaw = zeros(len(cx))
for i in range(len(cx)):
cy[i] = -sin(cx[i]/10) * cx[i]/8
for i in range (len(cx)-1):
pd[i] = (cy[i+1]-cy[i])/(cx[i+1]-cx[i])
for i in range (len(cx)-1):
pdd[i] = (cy[i+1]-2*cy[i] + cy[i-1])/(0.5* (cx[i+1]- cx[i-1]))**2
for i in range(len(cx)-1):
ck[i] = pdd[i]/((1+pd[i]**2)**1.5)
for i in range(len(pd)):
cyaw[i] = atan(pd[i])
pe = 0
pth_e = 0
i = 1
x = 0
y = -0.1
yaw = 0
v = 0
ind =0
class State:
def __init__(self, x=0.0, y=0.0, yaw=0.0, v=0.0):
self.x = x
self.y = y
self.yaw = yaw
self.v = v
def update(state, a, delta):
if delta >= max_steer:
delta = max_steer
if delta <= - max_steer:
delta = - max_steer
state.x = state.x + state.v * cos(state.yaw) * dt
state.y = state.y + state.v * sin(state.yaw) * dt
state.yaw = state.yaw + state.v / L * tan(delta) * dt
state.v = state.v + a * dt
return state
def PIDControl(target, current):
a = Kp * (target - current)
return a
#
# def pi_2_pi(angle): # the unit of angle is in rad;
# while (angle > pi):
# angle = angle - 2.0 * pi
#
# while (angle < -pi):
# angle = angle + 2.0 * pi
#
# return angle
def solve_DARE(A, B, Q, R):
"""
solve a discrete time_Algebraic Riccati equation (DARE)
"""
X = Q
maxiter = 500
eps = 0.01
for i in range(maxiter):
Xn = A.T * X * A - A.T * X * B * la.pinv(R + B.T * X * B) * B.T * X * A + Q
if (abs(Xn - X)).max() < eps:
X = Xn
break
X = Xn
return Xn
def dlqr(A, B, Q, R):
"""Solve the discrete time lqr controller.
x[k+1] = A x[k] + B u[k]
cost = sum x[k].T*Q*x[k] + u[k].T*R*u[k]
# ref Bertsekas, p.151
"""
# first, try to solve the ricatti equation
X = solve_DARE(A, B, Q, R)
# compute the LQR gain
K = la.pinv(B.T * X * B + R) * (B.T * X * A)
return K
def calc_nearest_index(state, cx, cy):
dx = [state.x - icx for icx in cx]
dy = [state.y - icy for icy in cy]
d = [abs(sqrt(idx ** 2 + idy ** 2)) for (idx, idy) in zip(dx, dy)]
error = min(d)
ind = d.index(error)
dy = cy[ind] - state.y
if dy > 0:
error = -error
return ind, error
def lqr_steering_control(state, cx, cy, cyaw, ck, pe, pth_e):
ind, e = calc_nearest_index(state, cx, cy)
k = ck[ind]
v = state.v
th_e = (state.yaw - cyaw[ind])
A = mat(zeros((4, 4)))
A[0, 0] = 1.0
A[0, 1] = dt
A[1, 2] = v
A[2, 2] = 1.0
A[2, 3] = dt
# print(A)
B = mat(zeros((4, 1)))
B[3, 0] = v / L
K = dlqr(A, B, Q, R)
print('K is', K)
x =mat(zeros((4, 1)))
x[0, 0] = e
x[1, 0] = (e - pe) / dt
x[2, 0] = th_e
x[3, 0] = (th_e - pth_e) / dt
ff = atan(L * k)
fb = (-K * x)
print(ff,fb)
delta = 1*ff + 1 * fb
print(delta)
return delta, ind, e, th_e
state = State(x=0.0, y= -0.5, yaw=0.0, v=0.0)
x = state.x
y = state.y
yaw = state.yaw
v = state.v
i = 0
x_pos = zeros(len(cx))
y_pos = zeros(len(cx))
while ind < len(cx):
delta,ind, e, th_e = lqr_steering_control(state, cx, cy, cyaw, ck, pe, pth_e)
pth_e = th_e
pe = e
print('lateral error is ',e)
v = state.v
print("v is",v)
#print('Index is ', ind)
if abs(e) > 4:
print('too far from reference!\n')
break
a = PIDControl(target_v, v)
state = update(state, a, delta)
x = state.x
y = state.y
x_pos[i] = x
y_pos[i] = y
i = i + 1
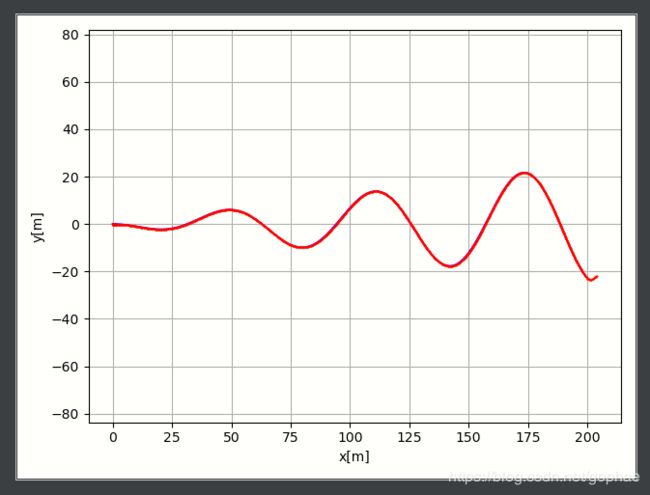
plt.plot(cx, cy,"-b")
for i in range(len(x_pos)):
plt.plot(x_pos[i],y_pos[i],".r",markersize = 1)
plt.grid(True)
plt.axis("equal")
plt.xlabel("x[m]")
plt.ylabel("y[m]")
plt.show()
print(cyaw[0:20])
效果如图: