简易KD树(C++)
k-d树介绍和类定义
k-d树( k-维树的缩写)是在k维欧几里德空间组织点的数据结构,可用在空间数据库和游戏优化等领域。具体来说,k-d树是每个节点都为k维点的二叉树。所有非叶子节点可以视作用一个超平面把空间分割成两个半空间。
下面是我按着描述粗糙写的一棵简易KD树,完成了树的创建、插入、按区域搜索、最近邻搜索等操作。本例中多维点由vector
#include
#include
#include
#include
using namespace std;
#ifndef KDTREE_H
#define KDTREE_H
class KDTree
{
struct KDNode
{
bool m_isLeaf;
vectorm_point;//k维的点
int m_split;//在第几维被分开
KDNode*m_parentNode;
KDNode*m_leftNode;
KDNode*m_rightNode;
};
private:
using st = vector::size_type;
KDNode*m_root;//根节点
int m_k;//k维
int m_pointNum;//点的数量
vector>m_points;//点的集合
public:
//下面是给用户提供的接口
KDTree(int k, vector>allpoints) :m_k(k)
{
m_root = new KDNode();
m_root->m_isLeaf = false;
m_root->m_leftNode = nullptr;
m_root->m_rightNode = nullptr;
m_pointNum = allpoints.size();
m_points = allpoints;
KDTreeBuild(allpoints, m_root);
}
void Insert(vectornewpoint);
vector>SearchByRegion(vectorfrom, vectorto)const;
vector SearchNearestNeighbor(vector goalpoint);
private:
~KDTree();
void KDTreeBuild(vector>points, KDNode* root);
//遍历寻找一个树中与目标点最近的点
void SearchNearestByTree(vector goalpoint, double&curdis, const KDNode*treeroot, vector&nearestpoint);
//递归查找区域内的点
void SearchRecu(vectorfrom, vectorto, const KDNode*temp, vector>&nodes)const;
//计算两个点的距离
double CalDistance(vector point1, vector point2);
};
#endif // !1 kd树的构建
树的构建思路如下图
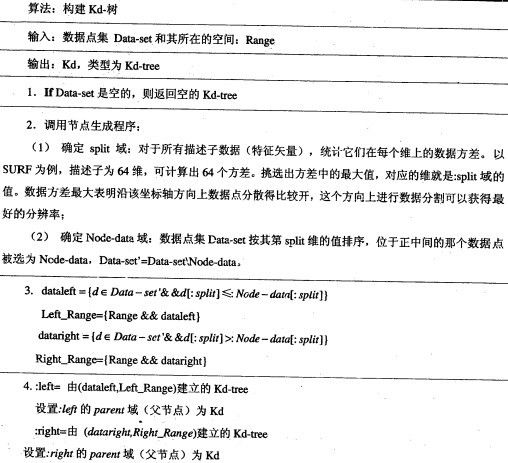
树的构建代码:
void KDTree::KDTreeBuild(vector>points, KDNode* root)
{
int indexpart = 0, max = 0;
vectortemp;
for (st i = 0; i < m_k; i++)
{
temp.clear();
for each (auto var in points)temp.push_back(var[i]);
//计算平均值
double ave = accumulate(temp.begin(), temp.end(), 0.0) / m_pointNum;
//计算方差
double accum = 0.0;
for each(auto var in temp) accum += (var - ave)*(var - ave);
if (accum > max)
{
max = accum;
indexpart = i;
}
}
//此时indexpart的值为当前要进行分裂的维数
temp.clear();
for each (auto var in points)temp.push_back(var[indexpart]);
//找到中值
sort(temp.begin(), temp.end());
double median = temp[(temp.size()) >> 1];
//将点分为左右两部分
vector>leftpoints, rightpoints;
for each (auto var in points)
{
if (var[indexpart] < median)
leftpoints.push_back(var);
if (var[indexpart] == median)
{
root->m_split = indexpart + 1;
root->m_point = var;
}
if (var[indexpart] > median)
rightpoints.push_back(var);
}
//递归建树
if (leftpoints.size() == 0 && rightpoints.size() == 0)root->m_isLeaf = true;
if (leftpoints.size() != 0)
{
root->m_leftNode = new KDNode();
root->m_leftNode->m_parentNode = root;
KDTreeBuild(leftpoints, root->m_leftNode);
}
if (rightpoints.size() != 0)
{
root->m_rightNode = new KDNode();
root->m_rightNode->m_parentNode = root;
KDTreeBuild(rightpoints, root->m_rightNode);
}
} 节点的插入
节点的插入与二叉树类似(二叉树就是一维kd树),即从根节点开始,在每一个层比较对应的坐标值,如果小于则跟踪到左子节点,若大于则跟踪到右子节点,当一个空指针出现时,就找到了结点将要插入的位置。代码如下:
void KDTree::Insert(vectornewpoint)
{
if (newpoint.size() != m_k)
{
cerr << "插入点维数与KD树不匹配" << endl;
exit(1);
}
KDNode*temp = m_root;
if (temp == nullptr)//若树为空树
{
temp = new KDNode();
temp->m_isLeaf = true;
temp->m_split = 1;
temp->m_point = newpoint;
return;
}
if (temp->m_isLeaf)//若树只有一个节点,做好被插入的准备
{
temp->m_isLeaf = false;
int max = 0, partindex = 0;
for (st i = 0; i < m_k; i++)
{
double delta = abs(newpoint[i] - temp->m_point[i]);
if (delta > max)
{
max = delta;
temp->m_split = i + 1;
}
}
}
while (true)
{
int partindex = temp->m_split - 1;
KDNode*nextnode;
if (newpoint[partindex] > temp->m_point[partindex])
{
if (temp->m_rightNode == nullptr)//插入
{
temp->m_rightNode = new KDNode();
temp->m_rightNode->m_parentNode = temp;
temp->m_rightNode->m_isLeaf = true;
temp->m_rightNode->m_split = 1;
temp->m_rightNode->m_point = newpoint;
break;
}
else nextnode = temp->m_rightNode;
}
else
{
if (temp->m_leftNode == nullptr)//插入
{
temp->m_leftNode = new KDNode();
temp->m_leftNode->m_parentNode = temp;
temp->m_leftNode->m_isLeaf = true;
temp->m_leftNode->m_split = 1;
temp->m_leftNode->m_point = newpoint;
break;
}
else nextnode = temp->m_leftNode;
}
if (nextnode->m_isLeaf)//如果下一个点是叶子节点,做好被插入的准备
{
nextnode->m_isLeaf = false;
int max = 0, partindex = 0;
for (st i = 0; i < m_k; i++)
{
double delta = abs(newpoint[i] - nextnode->m_point[i]);
if (delta > max)
{
max = delta;
nextnode->m_split = i + 1;
}
}
}
temp = nextnode;//往下走
}
}
根据区域进行查询
所谓根据区域进行查询,即输入一个区域(需与KD树维数一致),得到KD树中在该区域内的所有坐标点。该搜索往往是多条路向下搜索,并将沿路的符合条件的点都进行记录。在本系统中,输入区域的方式为由用户输入两个点,起点的所有坐标需均小于终点,这样的两个点就能代表一个查询区域,该模块的详细代码如下。
vector>KDTree::SearchByRegion(vectorfrom, vectorto)const
{
vector>result;
if (from.size() != m_k || to.size() != m_k)
{
cerr << "搜索区域维数与KD树不匹配" << endl;
exit(1);
}
for (st i = 0; i < m_k; i++)
{
if (from[i] > to[i])
{
cerr << "请保证区域起始点的所有坐标值小于区域终点" << endl;
exit(1);
}
}
SearchRecu(from, to, m_root, result);
return result;
}
void KDTree::SearchRecu(vectorfrom, vectorto, const KDNode*temp, vector>&nodes)const
{
if (temp == nullptr)return;
int partindex = temp->m_split - 1;
int value = temp->m_point[partindex];
if (from[partindex] <= value && to[partindex] >= value)//当前点在范围内
{
bool inregion = true;
for (st i = 0; i < m_k; i++)
{
if (from[i] > temp->m_point[i] || to[i] < temp->m_point[i])
inregion = false;
}
if (inregion)nodes.push_back(temp->m_point);
SearchRecu(from, to, temp->m_leftNode, nodes);
SearchRecu(from, to, temp->m_rightNode, nodes);
}
else if (value > to[partindex])
SearchRecu(from, to, temp->m_leftNode, nodes);
else if (value < from[partindex])
SearchRecu(from, to, temp->m_rightNode, nodes);
} 最近邻搜索
kd树的最近邻搜索算法应用广泛,其思路如下:
- 从根节点开始,递归的往下移。往左还是往右的决定方法与插入元素的方法一样(如果输入点在分区面的左边则进入左子节点,在右边则进入右子节点)。
- 一旦移动到叶节点,将该节点当作"当前最佳点"。
- 解开递归,并对每个经过的节点运行下列步骤:
- 如果当前所在点比当前最佳点更靠近输入点,则将其变为当前最佳点。
- 检查另一边子树有没有更近的点,如果有则从该节点往下找。
- 当根节点搜索完毕后完成最邻近搜索。
本例中详细代码如下:
double KDTree::CalDistance(vector point1, vector point2)
{
if (point1.size() != point2.size())
{
cerr << "两个点的维度不相同";
exit(1);
}
double distance = 0.0;
for (st i = 0; i < point1.size(); i++)
distance += pow((point1[i] - point2[i]), 2);
return sqrt(distance);
}
vector KDTree::SearchNearestNeighbor(vector goalpoint)
{
vectornearestpoint;
KDNode*temp = m_root;
//找到最邻近的叶子节点
while (!temp->m_isLeaf)
{
int partindex = temp->m_split - 1;
if (temp->m_leftNode != nullptr && goalpoint[partindex] < temp->m_point[partindex])
{
temp = temp->m_leftNode;
}
else if (temp->m_rightNode != nullptr)
{
temp = temp->m_rightNode;
}
}
nearestpoint = temp->m_point;
double curdis = CalDistance(goalpoint, nearestpoint);
//向上回溯
bool isleft = false;
while (temp != m_root)
{
isleft = (temp == temp->m_parentNode->m_leftNode);//判断当前点是否其父节点的左子节点
temp = temp->m_parentNode;//指针向上跟踪
if (CalDistance(goalpoint, temp->m_point) < curdis)
{
nearestpoint = temp->m_point;
curdis = CalDistance(goalpoint, nearestpoint);
}
int partindex = temp->m_split - 1;
//若圆与另一区域有相交,即另一边子树可能有更近的点
if (curdis > abs(temp->m_point[partindex] - goalpoint[partindex]))
{
if (isleft)
{
SearchNearestByTree(goalpoint, curdis, temp->m_rightNode, nearestpoint);
}
else SearchNearestByTree(goalpoint, curdis, temp->m_leftNode, nearestpoint);
}
}
return nearestpoint;
}
void KDTree::SearchNearestByTree(vector goalpoint, double&curdis, const KDNode*treeroot, vector&nearestpoint)
{
if (treeroot == nullptr)return;
double newdis = CalDistance(goalpoint, treeroot->m_point);
if (newdis < curdis)
{
curdis = newdis;
nearestpoint = treeroot->m_point;
}
SearchNearestByTree(goalpoint, curdis, treeroot->m_leftNode, nearestpoint);
SearchNearestByTree(goalpoint, curdis, treeroot->m_rightNode, nearestpoint);
} 本人在这里只是粗略的实现了kd树的几个功能,应该还有很多细节可以完善。谢谢观看:)