强化学习环境搭建
强化学习环境搭建
- 强化学习简介
- 环境安装
- Anaconda安装
- 安装Docker
- Docker介绍
- Docker安装
- OpenAI Gym安装
- Universe安装
- 测试 Gym 和 Universe
- 参考文献
强化学习简介
-
强化学习算法的大概流程
1.1. 智能体通过行为的选择与执行与环境交互
1.2.智能体的状态在执行了一个动作后进入下一个状态
1.3.环境会根据智能体的动作给予相应的奖惩
1.4.智能体根据环境给予的奖惩,不断的试错来学习适应环境 -
强化学习算法的要素
2.1.智能体:执行智能决策的的程序,我们最终训练得到的目标.是整个系统中的学习者----可以想象为一个婴儿,在不断的与身边的环境接触当中来不断的学习与成长.
2.2.策略函数:策略定义了智能体在环境中的行.智能体在环境中采取那种行动取决于策略.-----这里可以理解为那个婴儿在与环境接触过程中的学习问题和看待问题的思维方式,不同的思维方式将会影响婴儿做出不同的行为.也会形成婴儿不同的性格.
2.3.值函数:值函数是表示智能体在某一特定状态下的程度.这个与策略相关.-----这个可以理解为大人对婴儿做出行为的一种评判,当婴儿的行为是好的时候就会给婴儿奖励,给他一块糖,或者是多块,当婴儿的行为是不好的时候,就会不理婴儿或者的打他的屁股.
2.4.模型:模型是智能体对环境的表示.学习分为基于模型的学习和无模型的学习两种类型.基于模型的学习是在学习过程中会使用先前学习到的经验来学习.无模型的学习则是通过不断的试错的来学习.-----就好比于有些孩子没记性,有些孩子记性好,同样的错误有记性的孩子可能只犯一两次就学乖了,但是没有记性的孩子会不断犯同一个错误.但是最终会因为终犯错误的教训,使这个孩子不会犯这个错误,并且犯这个错误的概率会更小. -
强化学习平台
3.1.OpenAI Gym和Universe
OpenAI Gym是一个用于构建,评估和比较强化学习的算法工具包.兼容Tensorflow、Theano、Keras
OpenAI Universe是OpenAI Gym的扩展,提供了从简单到实时复杂的各种环境下训练和评估智能体的功能.可以无限访问许多游戏.
3.2.DeepMind Lab
由DeepMind团队提供的强化学习平台
3.3.RL_Glue
3.4.Project Malmo
3.5.VIzDoom
环境安装
由于目前OpenAI Gym和Universe只支持Linux和Mac系统,所有一下环境安装在Ubuntu18.04下安装.Mac系统安装类似.Windows系统用户可以在虚拟机中安装Linux或者Mac系统来安装.
Anaconda安装
- 下载anaconda
wget https://repo.continuum.io/archive/Anaconda3-5.2.0-Linux-x86_64.sh
2.安装
bash Anaconda3-5.2.0-Linux-x86_64.sh
# 在 ~/.bashrc 文件中加入下面路径:
export PATH="/home/$USER/anaconda3/bin:$PATH"
# 激活环境
source ~/.bashrc
- 创建conda环境
conda create --name universe python=3.6 anaconda
# 激活conda环境
source activate universe
conda操作相关命令
# 退出虚拟环境:
source deactivate universe
# 查看有那些环境 , 前面有"*"的是当前使用的环境
conda env list
# 查看环境安装的包
conda list
# 删除虚拟环境
conda remove --name --all
# 虚拟环境中安装软件
conda install xxx
- 安装其他依赖
# 安装依赖
conda install pip six libgcc swig
# 安装opencv
conda install opencv
安装Docker
Docker介绍
Docker 是一个开源的应用容器引擎,让开发者可以打包他们的应用以及依赖包到一个可移植的容器中,然后发布到任何流行的 Linux 机器上,也可以实现虚拟化。容器是完全使用沙箱机制,相互之间不会有任何接口
Docker 官方英文教程.简单的说Docker类似与github.只不过github是对代码进行托管,而Docker则是对我们的开发的环境进行托管.我们可以将我们的开发环境上传到Docker Hub中在我们跟换电脑或者是部署到服务器时,直接可以在Docker Hub上拉取我们已经部署好的环境或者是别人公开部署包的环境,这样避免了我们重复的配置环境的麻烦.而我们安装Docker是因为Universe需要部署在Docker中Doker中文手册
Docker安装
- DOcker基础安装
# 安装依赖
sudo apt-get install apt-transport-https ca-certificates curl software-properties-common
# 如果是Ubuntu14.04 需要执行下面命令
sudo apt-get install linux-image-extra-$(uname -r) linux-image-extra-virtual
# 获取Key
curl -fsSL https://download.docker.com/linux/ubuntu/gpg | sudo apt-key add -
# 更新源
sudo add-apt-repository "deb [arch=amd64] https://download.docker.com/linux/ubuntu $(lsb_release -cs) stable"
# 更新
sudo apt-get update
# 安装 Docker
sudo apt-get install docker-ce
- Docker配置
# 首先,我们启动 Docker 服务:
sudo service docker start
# 测试Docker是否安装成功
sudo docker run hello-world
# Docker 输出 "Hello from Docker !",表示安装成功
可以看到上面我们都是以 root 的身份运行 Docker 的命令。为了让我们之后每次运行 Docker 不需要用 root 身份而只需要用我们的普通用户身份,我们可以这样做:
#创建一个用户组
sudo groupadd docker
# 把我们当前所在的用户添加到 docker 这个用户组里:
sudo usermod -aG docker $USER
# 重启
sudo reboot
OpenAI Gym安装
- 在创建的环境里安装相关依赖项
- 确保在创建的universeconda环境中,如果没有使用
source activate universe激活 - 软件更新
sudo apt-get update - 安装依赖软件库
如果是 Ubuntu 14.04,则略有不同,还需要运行以下命令:sudo apt-get install golang python3-dev python-dev libcupti-dev libjpeg-turbo8-dev make tmux htop chromium-browser git cmake zlib1g-dev libjpeg-dev xvfb libav-tools xorg-dev python-opengl libboost-all-dev libsdl2-dev swig
sudo add-apt-repository ppa:ubuntu-lxc/lxd-stable - 确保在创建的universeconda环境中,如果没有使用
- Gym安装
Gym安装提供两种安装方式- 直接使用pip安装
这里指定安装的版本为0.9.5本博客撰写的时候最高版本为0.12.0.但是建议使用0.9.6以下的版本,因为在后面的使用过程中使用超过0.9.6版本的gym会出现下面报错:(所以强烈建议使用第一种安装方式)pip install gym==0.9.5 # 安装部分环境 pip install gym[all]==0.9.5 #安装所有游戏环境

- 复制gym代码库安装使用这个方式安装也会出现上面的问题,也需要指定版本安装这个时候需要在github上下载小于0.9.6的版本不然会出现上面问题.
# git gym代码 cd ~ git clone https://github.com/openai/gym.git # 安装 cd gym pip install -e '.[all]' # - 常见错误解决
在执行pip install -e '.[all]'报错-
failed with error code 1 in /tmp/pip-install-yqfui82v/mujoco-py/

出现这个错误的原因是MuJoCo 是 Multi-Joint dynamics with Contact 的缩写没有安装成功.目前的最新版的 Gym 的那个 MuJoCo 的模块有些问题,似乎安装不上,MuJoCo 本身也比较特殊,需要一些额外配置。
MuJoCo 是 Multi-Joint dynamics with Contact 的缩写。表示「有接触的多关节动力」是用于机器人、生物力学、动画等需要快速精确仿真领域的物理引擎。 官网:http://mujoco.org解决方法
- 安装MuJoCo物理引擎
# 下载mujoco物理引擎源码 git clone https://github.com/openai/mujoco-py,git cd mujoco-py sudo apt-get update # 安装依赖库 sudo apt-get install libgl1-mesa-dev libgl1-mesa-glx libosmesa6-dev python3-pip python3-numpy python3-scipy pip3 install -r requirements.txt sudo python3 setup.py install - 更改gym setup.py 配置
gedit ~/gym/setup.py
将下面的键值对注释掉
然后重新安装gym'mujoco': ['mujoco_py>=1.50', 'imageio'], 'robotics': ['mujoco_py>=1.50', 'imageio'],
- 安装MuJoCo物理引擎
- Error:command ‘gcc’ failed with exit status 1:
sudo apt-get update sudo apt-get insatll python-dev sudo apt-get isnatll libevent-dev
-
Universe安装
从universe源码安装
cd ~
git clone https://github.com/openai/universe.git
cd universe
pip install -e .
universe安装成功
测试 Gym 和 Universe
- 测试代码一
# -*- coding: utf-8 -*-
# wh
# 2019/4/30
import sys
sys.path.append('path')
import gym
import universe
import random
env = gym.make("flashgames.NeonRace-v0")
env.configure(remotes=1)
# 左转
left = [('keyEvent','ArrowUp',True),('KeyEvent','ArrowLeft',True),('KeyEvent','ArrowRight',False)]
# 右转
right = [('KeyEvent', 'ArrowUp', True), ('KeyEvent', 'ArrowLeft', False),
('KeyEvent', 'ArrowRight', True)]
# 直行
forward = [('KeyEvent', 'ArrowUp', True), ('KeyEvent', 'ArrowRight', False),
('KeyEvent', 'ArrowLeft', False), ('KeyEvent', 'n', True)]
# 使用turn变量来决定是否转弯
turn = 0
# 将所有奖励存储在奖励列表中
rewards = []
#将使用缓冲区作为某种阈值
buffer_size = 100
# 我们设定了我们的初步行动,即我们的汽车向前移动而没有任何转弯
action = forward
while True:
turn -= 1
#让我们说最初我们不转,向前迈进。
#首先,如果小于0,我们将检查转弯的值
#然后没有转动的必要,我们只是前进
if turn <= 0:
action = forward
turn = 0
action_n = [action for ob in observation_n]
# 然后我们使用env.step()来执行一个动作(现在向前移动)一次性步骤
observation_n, reward_n, done_n, info = env.step(action_n)
# 将奖励存储在奖励列表中
rewards += [reward_n[0]]
#将生成一些随机数,如果小于0.5,那么我们将采取正确的,否则
#将左转,我们将存储通过执行每个动作获得的所有奖励
#根据我们的奖励,将了解哪个方向在几个时间步长内最佳。
if len(rewards) >= buffer_size:
mean = sum(rewards) / len(rewards)
if mean == 0:
turn = 20
if random.random() < 0.5:
action = right
else:
action = left
rewards = []
env.render()
2.测试代码二
# -*- coding: utf-8 -*-
# wh
# 2019/4/30
import sys
sys.path.append('path')
import gym
import universe
import random
env = gym.make("flashgames.NeonRace-v0")
env.configure(remotes=1)
# 左转
left = [('keyEvent','ArrowUp',True),('KeyEvent','ArrowLeft',True),('KeyEvent','ArrowRight',False)]
# 右转
right = [('KeyEvent', 'ArrowUp', True), ('KeyEvent', 'ArrowLeft', False),
('KeyEvent', 'ArrowRight', True)]
# Move forward
forward = [('KeyEvent', 'ArrowUp', True), ('KeyEvent', 'ArrowRight', False),
('KeyEvent', 'ArrowLeft', False), ('KeyEvent', 'n', True)]
# We use turn variable for deciding whether to turn or not
turn = 0
# We store all the rewards in rewards list
rewards = []
# we will use buffer as some kind of threshold
buffer_size = 100
# We set our initial action has forward i.e our car moves just forward without making any turns
action = forward
while True:
turn -= 1
# Let us say initially we take no turn and move forward.
# First, We will check the value of turn, if it is less than 0
# then there is no necessity for turning and we just move forward
if turn <= 0:
action = forward
turn = 0
action_n = [action for ob in observation_n]
# Then we use env.step() to perform an action (moving forward for now) one-time step
observation_n, reward_n, done_n, info = env.step(action_n)
# store the rewards in the rewards list
rewards += [reward_n[0]]
# We will generate some random number and if it is less than 0.5 then we will take right, else
# we will take left and we will store all the rewards obtained by performing each action and
# based on our rewards we will learn which direction is the best over several timesteps.
if len(rewards) >= buffer_size:
mean = sum(rewards) / len(rewards)
if mean == 0:
turn = 20
if random.random() < 0.5:
action = right
else:
action = left
rewards = []
env.render()
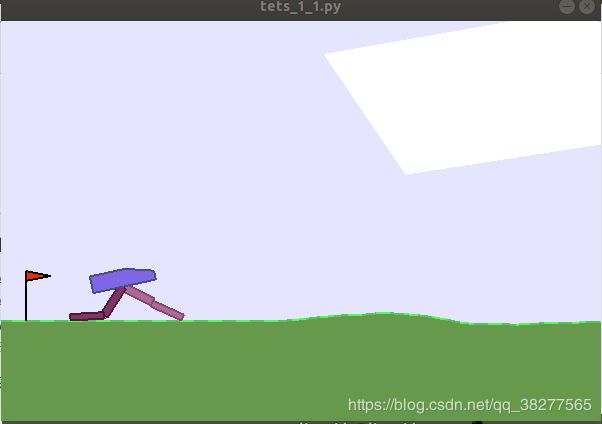
在执行这个代码的时候会从Docker hub上下载容器所以会很慢

结果:
参考文献
- https://github.com/PacktPublishing/Hands-On-Reinforcement-Learning-with-Python
- https://www.jianshu.com/p/536d300a397e
- http://www.docker.org.cn/