利用Adams对单摆进行建模、仿真的动力学分析
关于Adams
automatic dynamic analysis of mechanical system , 对机械系统进行动力学分析的软件。
动力学分析:对某个系统,给它加上力或运动后,经过计算,可以得到任何一个构件或某个点的位移、速度以及加速度,运动副的受力情况。
Adams,输入的是机械系统,输出的是位移、速度、加速度和力。
Adams/view:建模;Adams/PostProcessor:后处理
model name:使用英文字符
gravity(重力):是否需要考虑重力以及重力方向(可调整),运动学分析不需要考虑重力;动力学分析需要考虑;静力学分析根据问题需要决定。方向一般沿着Y负方向,大小为-9806.65kg*mm/s。
units(单位):一般设置为MMKS(mm/kg/N/s/deg)。
working directory(工作路径):使用英文字符。
setting(设置):对units、gravity、working grid网格设置(可用于捕捉)、classic(经典界面)。
tools:table editor 用作marker创建。
model tree(选择数据库对象与修改)
动力学仿真步骤:
1.建模:直接建立数学模型(elements/system elements,创建微分代数方程);间接创建数学模型(创建/导入几何模型、施加约束、施加驱动(力),软件自动转化为微分代数方程)
静力学问题:一般加力;运动学问题:一般加驱动(如角速度);动力学问题:施加力或驱动均可
2.仿真与后处理:查看动画、构件/点的位移、速度、加速度以及力
bodies:
solid(实体建模)、construction(构造体,创建点/直线/曲线,如用直线创建无重细绳)、
connection:
joints(铰链、移动副、转动副、球铰…)、primitives(线内、面内、轴垂直/平行、定向等约束);couplers(齿轮副/耦合副:链传动、带传动、绳传动);special(点线/线线高副、凸轮机构)
motion:
joints motion(移动副驱动(位移、速度、加速度)/转动副驱动(角位移、角速度、角加速度));general motion(点驱动:单向/空间驱动)
forces:
applied forces(力与力偶;单元素力(偶)/三元素力(偶))、flexible connection(柔性连接:拉力弹簧、扭转弹簧、轴套、弹性梁等)、special forces(接触力、模态力、轮胎力、重力)
simulation:.
setup(设置仿真脚本);simulate(仿真:交互仿真功能/程序脚本仿真)
results:
review(动画);postprocessor(后处理)
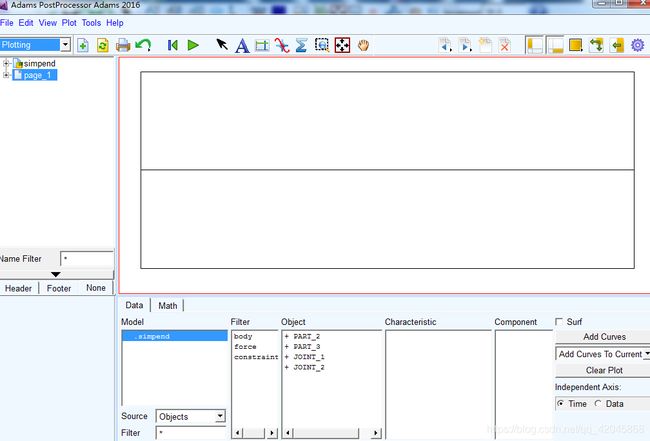
关于postprocessor
file/open(import)(导入数据);export(导出数据)
输出内容(动画、仿真报告、曲线数据)
视口导入动画/曲线并控制:视口任意位置右键/【load animation】;视口任意位置右键/【load plot】
source(object/result sets)-model-filter(body)-object-character(位移、速度、加速度、力)-component(方向)-surf(浏览勾选)【surf悬空+add】
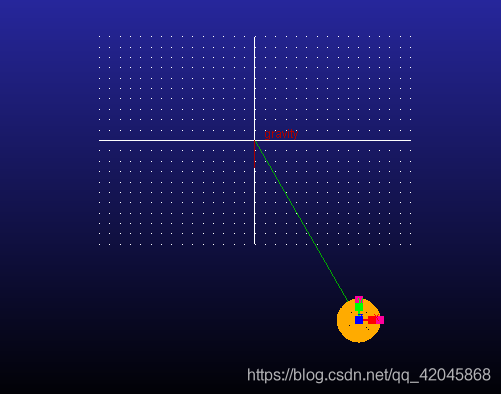
实例单摆运动学分析
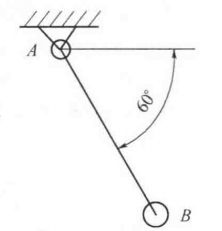
球质量为1kg,单摆长度1m。

注意这里的长度单位为mm
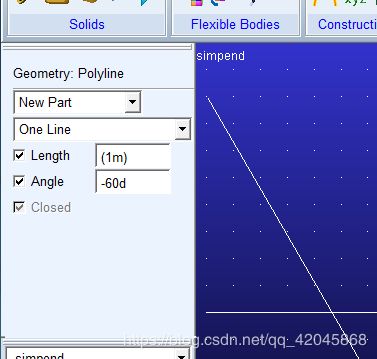
创建单摆(用直线代替摆)
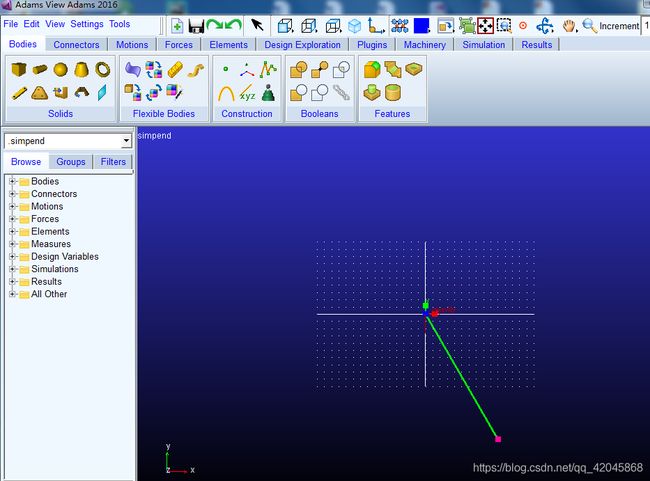

创建球
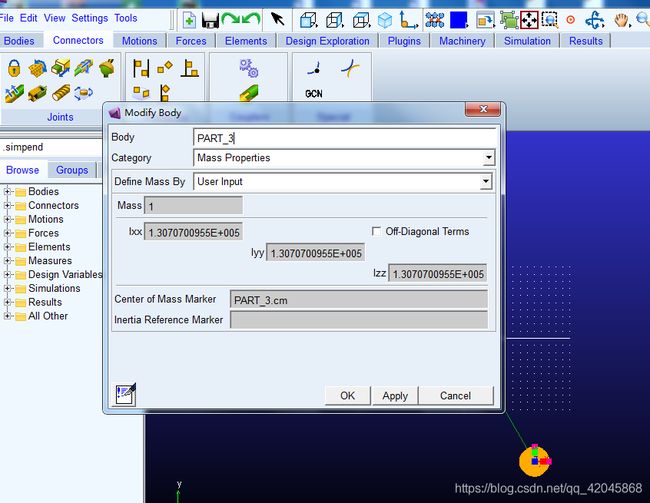
修改球的质量

施加转动副

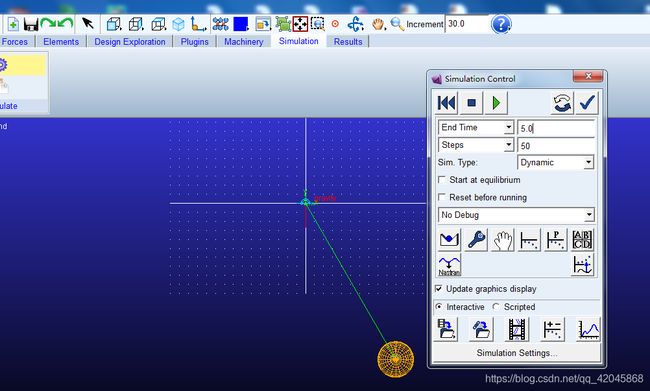
仿真设置
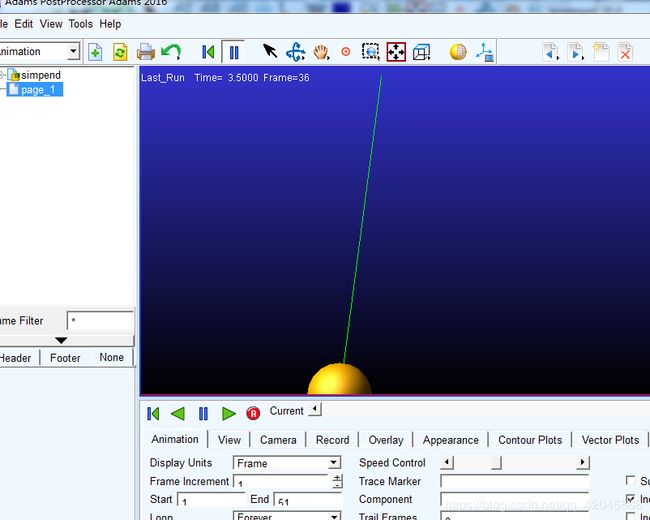
动画仿真

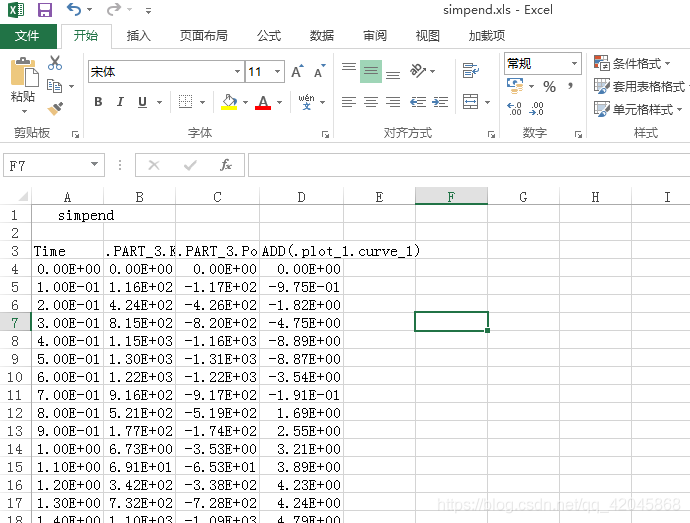
球质心速度(part3-cm_velocity.mag)变化曲线

球动能变化(part3-kinetic_energy_mag)曲线
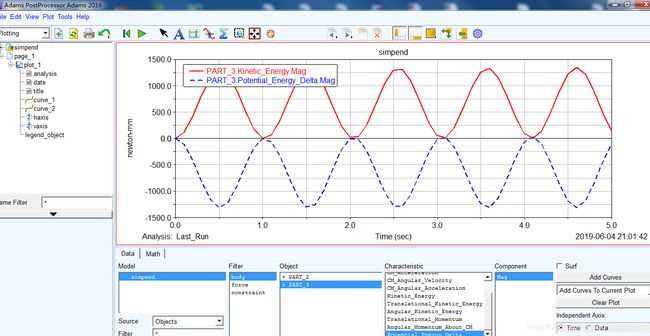

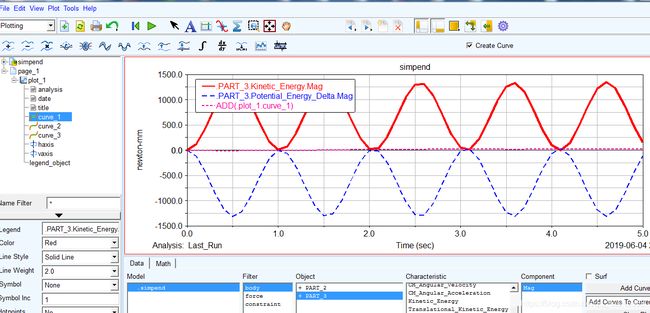
球势能变化(part3—potential_energy_delta_mag)曲线,动能与势能曲线叠加

数据表格形式
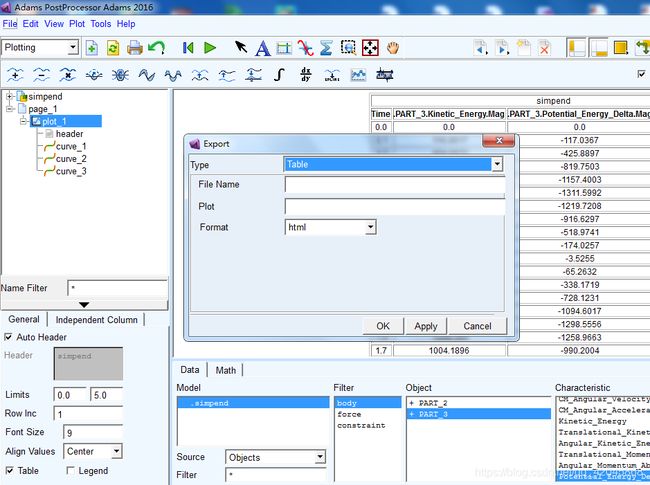
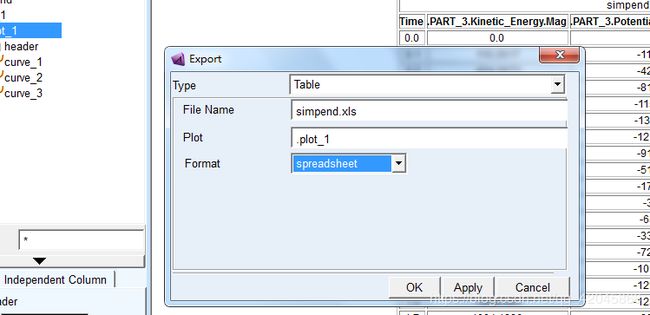
导出数据
![]()
完毕