蚁群算法(ACO)最短路径规划(MATLAB)
蚁群算法最早是由Marco Dorigo等人在1991年提出,他们在研究新型算法的过程中,发现蚁群在寻找食物时,通过分泌一种称为信息素的生物激素交流觅食信息从而能快速的找到目标,据此提出了基于信息正反馈原理的蚁群算法。
蚁群算法根据模拟蚂蚁寻找食物的最短路径行为来设计的仿生算法,因此一般而言,蚁群算法用来解决最短路径问题,并真的在旅行商问题(TSP,一个寻找最短路径的问题)上取得了比较好的成效。目前,也已渐渐应用到其他领域中去,在图着色问题、车辆调度问题、集成电路设计、通讯网络、数据聚类分析等方面都有所应用。
具体概述及通用MATLAB代码请见: http://www.omegaxyz.com/2018/01/26/aco/
下面是蚁群算法机器人最短路径规划问题的MATLAB代码
(1代表障碍物)
function main()
G=[0 0 0 0 0 0 1 1 1 0 0 0 0 0 0 0 0 0 0 0;
0 1 1 0 0 0 1 1 1 0 0 0 0 0 0 0 0 0 0 0;
0 1 1 0 0 0 1 1 1 0 0 0 0 0 0 0 0 0 0 0;
0 0 0 0 0 0 1 1 1 0 0 0 0 0 0 0 0 0 0 0;
0 0 0 0 0 0 1 1 1 0 0 0 0 0 0 0 0 0 0 0;
0 1 1 1 0 0 1 1 1 0 0 0 0 0 0 0 0 0 0 0;
0 1 1 1 0 0 1 1 1 0 0 0 0 0 0 0 0 0 0 0;
0 1 1 1 0 0 1 1 1 0 1 1 1 1 0 0 0 0 0 0;
0 1 1 1 0 0 0 0 0 0 1 1 1 1 0 0 0 0 0 0;
0 0 0 0 0 0 0 0 0 0 1 1 1 1 0 0 0 0 0 0;
0 0 0 0 0 0 0 1 1 1 1 1 1 1 0 0 0 0 0 0;
0 0 0 0 0 0 0 1 1 1 1 1 1 1 0 0 0 0 0 0;
0 0 0 0 0 0 0 0 0 0 0 1 1 1 0 1 1 1 1 0;
0 0 0 0 0 0 0 0 0 0 0 1 1 1 0 1 1 1 1 0;
1 1 1 1 0 0 0 0 0 0 0 1 1 1 0 1 1 1 1 0;
1 1 1 1 0 0 1 1 1 1 1 1 0 0 0 0 0 0 0 0;
0 0 0 0 0 0 1 1 1 1 1 1 0 0 0 0 0 1 1 0;
0 0 0 0 0 0 0 0 0 0 1 1 0 0 0 0 0 1 1 0;
0 0 0 0 0 0 0 0 0 0 1 1 0 0 1 0 0 0 0 0;
0 0 0 0 0 0 0 0 0 0 1 1 0 0 0 0 0 0 0 0;];
MM=size(G,1); % G 地形图为01矩阵,如果为1表示障碍物
Tau=ones(MM*MM,MM*MM); % Tau 初始信息素矩阵
Tau=8.*Tau;
K=100; %迭代次数(指蚂蚁出动多少波)
M=50; %蚂蚁个数
S=1 ; %最短路径的起始点
E=MM*MM; %最短路径的目的点
Alpha=1; % Alpha 表征信息素重要程度的参数
Beta=7; % Beta 表征启发式因子重要程度的参数
Rho=0.3 ; % Rho 信息素蒸发系数
Q=1; % Q 信息素增加强度系数
minkl=inf;
mink=0;
minl=0;
D=G2D(G);
N=size(D,1); %N表示问题的规模(象素个数)
a=1; %小方格象素的边长
Ex=a*(mod(E,MM)-0.5); %终止点横坐标
if Ex==-0.5
Ex=MM-0.5;
end
Ey=a*(MM+0.5-ceil(E/MM)); %终止点纵坐标
Eta=zeros(N); %启发式信息,取为至目标点的直线距离的倒数
%以下启发式信息矩阵
for i=1:N
ix=a*(mod(i,MM)-0.5);
if ix==-0.5
ix=MM-0.5;
end
iy=a*(MM+0.5-ceil(i/MM));
if i~=E
Eta(i)=1/((ix-Ex)^2+(iy-Ey)^2)^0.5;
else
Eta(i)=100;
end
end
ROUTES=cell(K,M); %用细胞结构存储每一代的每一只蚂蚁的爬行路线
PL=zeros(K,M); %用矩阵存储每一代的每一只蚂蚁的爬行路线长度
%启动K轮蚂蚁觅食活动,每轮派出M只蚂蚁
for k=1:K
for m=1:M
%状态初始化
W=S; %当前节点初始化为起始点
Path=S; %爬行路线初始化
PLkm=0; %爬行路线长度初始化
TABUkm=ones(N); %禁忌表初始化
TABUkm(S)=0; %已经在初始点了,因此要排除
DD=D; %邻接矩阵初始化
%下一步可以前往的节点
DW=DD(W,:);
DW1=find(DW);
for j=1:length(DW1)
if TABUkm(DW1(j))==0
DW(DW1(j))=0;
end
end
LJD=find(DW);
Len_LJD=length(LJD);%可选节点的个数
%蚂蚁未遇到食物或者陷入死胡同或者觅食停止
while W~=E&&Len_LJD>=1
%转轮赌法选择下一步怎么走
PP=zeros(Len_LJD);
for i=1:Len_LJD
PP(i)=(Tau(W,LJD(i))^Alpha)*((Eta(LJD(i)))^Beta);
end
sumpp=sum(PP);
PP=PP/sumpp;%建立概率分布
Pcum(1)=PP(1);
for i=2:Len_LJD
Pcum(i)=Pcum(i-1)+PP(i);
end
Select=find(Pcum>=rand);
to_visit=LJD(Select(1));
%状态更新和记录
Path=[Path,to_visit]; %路径增加
PLkm=PLkm+DD(W,to_visit); %路径长度增加
W=to_visit; %蚂蚁移到下一个节点
for kk=1:N
if TABUkm(kk)==0
DD(W,kk)=0;
DD(kk,W)=0;
end
end
TABUkm(W)=0; %已访问过的节点从禁忌表中删除
DW=DD(W,:);
DW1=find(DW);
for j=1:length(DW1)
if TABUkm(DW1(j))==0
DW(j)=0;
end
end
LJD=find(DW);
Len_LJD=length(LJD);%可选节点的个数
end
%记下每一代每一只蚂蚁的觅食路线和路线长度
ROUTES{k,m}=Path;
if Path(end)==E
PL(k,m)=PLkm;
if PLkm<minkl
mink=k;minl=m;minkl=PLkm;
end
else
PL(k,m)=0;
end
end
%更新信息素
Delta_Tau=zeros(N,N);%更新量初始化
for m=1:M
if PL(k,m)
ROUT=ROUTES{k,m};
TS=length(ROUT)-1;%跳数
PL_km=PL(k,m);
for s=1:TS
x=ROUT(s);
y=ROUT(s+1);
Delta_Tau(x,y)=Delta_Tau(x,y)+Q/PL_km;
Delta_Tau(y,x)=Delta_Tau(y,x)+Q/PL_km;
end
end
end
Tau=(1-Rho).*Tau+Delta_Tau;%信息素挥发一部分,新增加一部分
end
%绘图
plotif=1;%是否绘图的控制参数
if plotif==1 %绘收敛曲线
minPL=zeros(K);
for i=1:K
PLK=PL(i,:);
Nonzero=find(PLK);
PLKPLK=PLK(Nonzero);
minPL(i)=min(PLKPLK);
end
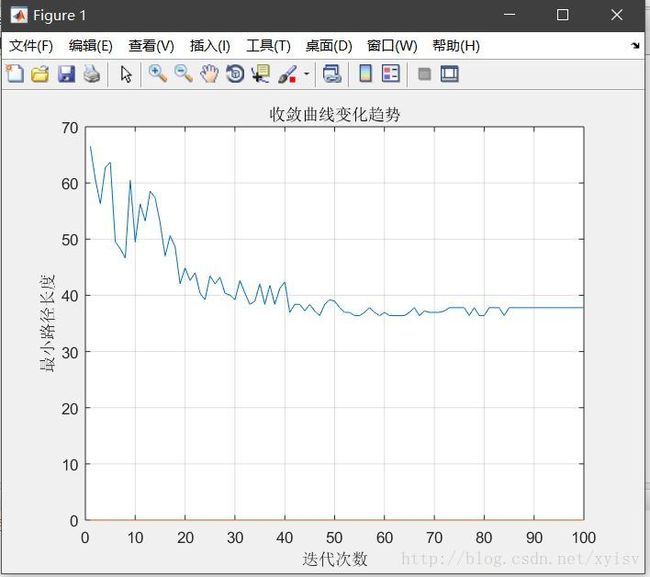
figure(1)
plot(minPL);
hold on
grid on
title('收敛曲线变化趋势');
xlabel('迭代次数');
ylabel('最小路径长度'); %绘爬行图
figure(2)
axis([0,MM,0,MM])
for i=1:MM
for j=1:MM
if G(i,j)==1
x1=j-1;y1=MM-i;
x2=j;y2=MM-i;
x3=j;y3=MM-i+1;
x4=j-1;y4=MM-i+1;
fill([x1,x2,x3,x4],[y1,y2,y3,y4],[0.2,0.2,0.2]);
hold on
else
x1=j-1;y1=MM-i;
x2=j;y2=MM-i;
x3=j;y3=MM-i+1;
x4=j-1;y4=MM-i+1;
fill([x1,x2,x3,x4],[y1,y2,y3,y4],[1,1,1]);
hold on
end
end
end
hold on
title('机器人运动轨迹');
xlabel('坐标x');
ylabel('坐标y');
ROUT=ROUTES{mink,minl};
LENROUT=length(ROUT);
Rx=ROUT;
Ry=ROUT;
for ii=1:LENROUT
Rx(ii)=a*(mod(ROUT(ii),MM)-0.5);
if Rx(ii)==-0.5
Rx(ii)=MM-0.5;
end
Ry(ii)=a*(MM+0.5-ceil(ROUT(ii)/MM));
end
plot(Rx,Ry)
end
plotif2=0;%绘各代蚂蚁爬行图
if plotif2==1
figure(3)
axis([0,MM,0,MM])
for i=1:MM
for j=1:MM
if G(i,j)==1
x1=j-1;y1=MM-i;
x2=j;y2=MM-i;
x3=j;y3=MM-i+1;
x4=j-1;y4=MM-i+1;
fill([x1,x2,x3,x4],[y1,y2,y3,y4],[0.2,0.2,0.2]);
hold on
else
x1=j-1;y1=MM-i;
x2=j;y2=MM-i;
x3=j;y3=MM-i+1;
x4=j-1;y4=MM-i+1;
fill([x1,x2,x3,x4],[y1,y2,y3,y4],[1,1,1]);
hold on
end
end
end
for k=1:K
PLK=PL(k,:);
minPLK=min(PLK);
pos=find(PLK==minPLK);
m=pos(1);
ROUT=ROUTES{k,m};
LENROUT=length(ROUT);
Rx=ROUT;
Ry=ROUT;
for ii=1:LENROUT
Rx(ii)=a*(mod(ROUT(ii),MM)-0.5);
if Rx(ii)==-0.5
Rx(ii)=MM-0.5;
end
Ry(ii)=a*(MM+0.5-ceil(ROUT(ii)/MM));
end
plot(Rx,Ry)
hold on
end
end
function D=G2D(G)
l=size(G,1);
D=zeros(l*l,l*l);
for i=1:l
for j=1:l
if G(i,j)==0
for m=1:l
for n=1:l
if G(m,n)==0
im=abs(i-m);jn=abs(j-n);
if im+jn==1||(im==1&&jn==1)
D((i-1)*l+j,(m-1)*l+n)=(im+jn)^0.5;
end
end
end
end
end
end
end
效果:
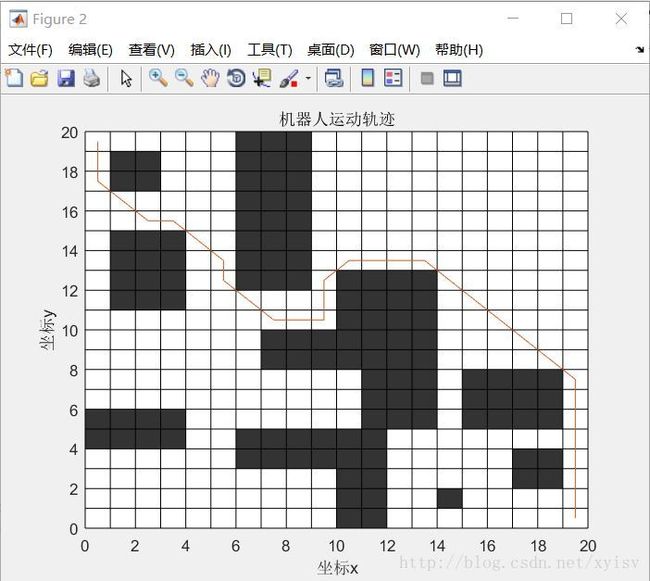
最短路径长度稳定在38。
G2D及多出口情况参考:http://www.omegaxyz.com/2019/01/28/aco_routes2/