17.立体匹配——动态规划公式(Dynamic Programming Formulation),二维网格上的相干立体_4
目录
动态规划公式(Dynamic Programming Formulation)
二维网格上的相干立体
动态规划公式(Dynamic Programming Formulation)
这就是所谓的动态规划公式。这有点复杂,但请耐心听我说。
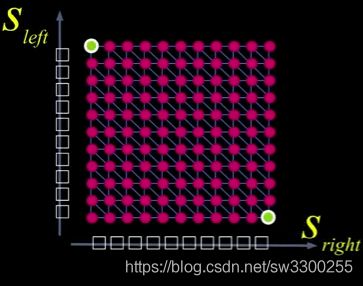
我们这里有,我假设我有左边的扫描线信号在这里每一个都是像素(如图1)。不过,我注意到点比像素多。假设这个网格中有多少个点就有多少个正方形。这里也是一样(如图2)。
 1
1  2
2
假设我们知道这里最左边的像素对应这个(如图1)。最右边的像素对应于这个,all right?
 1
1 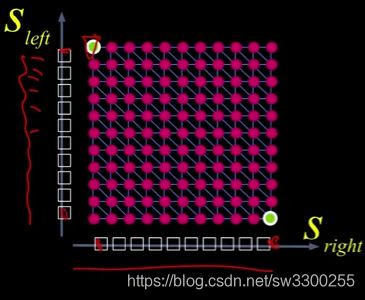 2
2
那么,从左到右的映射的一个解就是从左上角到右下角的路径。有一条特定的路径(如图1),okay? 目标是找到可能的最佳路径。最好的路径意味着最低的成本。
 1
1
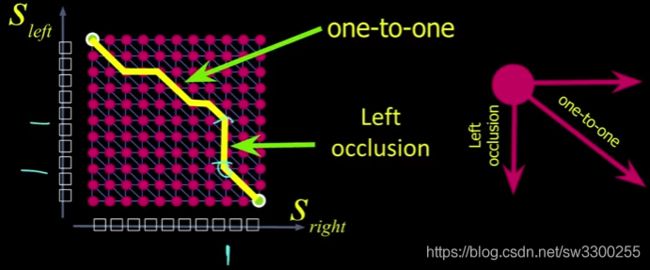
现在,当你位于这个网格中的某个地方(如图),这个地方只有三种不同方向的路径可以走。

最简单的方法是沿着对角线走(如图)。

现在,当你沿着对角线走,它的意思是,如果这个像素(X轴)映射到这(Y轴)个,那么这个(X轴)就映射到下一个(Y轴)。也就是说,它们保持相同的差异。如果我要加3来匹配这个像素,那么这个也是加3,然后继续。
 1
1
 2
2
但是,假设我有一些像素在一个图像中可见,在下一个图像中不可见。这里有一个,我说的区域是左遮蔽(occlusion)。我的意思是左眼看得见,右眼看不到。这意味着所有这些像素(如图1),这个范围(如图2),都映射到这个位置(如图3)。
 1
1 2
2
 3
3
你可以把它想象成这个像素(如图1)被映射到这个像素上(如图2),但是所有这些都没有被看到(如图3)。这就是左遮蔽(Left Occlusion)。
 1
1 2
2
 3
3
相应地,你可以有右遮蔽(如图),all right?

我们的目标是找到成本最低的方法。现在,当你对角线移动时,你的成本就是两个像素之间的匹配,这个匹配和我们之前做的很像。归一化相关性或平方差的和,取决于你做的是相似还是不相似的。但是当你不是一对一的时候,你实际上是在做遮蔽(Occlusion),你需要做的是为遮蔽像素付出代价。设计了很多方法告诉你如何分配成本。有些他们是贝叶斯定理,有些是其它的。
现在,对于那些知道最短路径或者Dijkstra算法或者其他求解方法的人。这可以表示为一个动态规划问题。动态规划方法很好,因为它们计算效率高。你不需要计算所有可能的路径。但你仍然可以计算出可能的最佳路径。唯一需要的是你必须能够计算水平的,垂直的 或 对角线的成本。在这里,我列出了一些参考资料,包括博斯克(Bobick)的一篇,它展示了如何做到这一点。我们介绍了这个叫做地面控制点(ground control points)的东西,这是一种很酷的方式对你使用的遮蔽成本值不是很敏感。这是早期方法的一部分问题,但这是在后面的。
二维网格上的相干立体

再看看斯库巴大学的事情,这里你可以看到,通过动态编程,我们得到了比以前更好的解决方案。这里的情况越来越好,那里也越来越好(如图)。但是你会注意到这些条纹。这是有意义的因为每条扫描线都是独立于另一条扫描线的。所以它不知道之前的解,所以当你改变扫描线,你可能会得到一个合理的位移。不幸的是,你不能用动态规划在二维网格上找到空间上一致的差异集。你必须采取另一种方法。

所以在激励另一种方法时,我们这样想的,是什么定义了一组好的对应(correspondences)? 首先,回到我们之前的工作。我们希望每个像素从左到右找到一个好的外观匹配。或者从右到左。我们讨论匹配质量。但另一件事是,还记得我们第一次过滤噪音的时候,我们说过我们做的一个假设是附近的两个像素有相似的实值吗? 当你谈到深度的时候,你也可以讨论附近的两个像素是如何有接近相同深度的趋势的。这意味着它们可能有相同的差异。所以,如果这个像素,需要平移4个单位,那么附近的这个就不应该平移很多。okay,我可能想惩罚那些有很多跳跃的解。

我们现在要用的方法是:我们先来看这两个东西(如图),它把立体视觉看作是能量最小化的问题。第一项,能量迷你,哦,让我。我应该在这里定义i1是左边的图像,i2是右边的图像。我们在左边有一个窗口,我们要从右边看它,然后一直到右边是一个视差图像,okay? 这就是我们计算的视差。

我们的能量最小化方法需要两个能量项。第一项是数据项(如图1)。数据项表示对所有像素求和(如图2),这个窗口(如图3)减去来自另一个图像上的窗口(如图4),所以这个窗口(如图5)减去那个这个窗口(如图6)的平方(如图7),应该尽可能小。所以,我们想,如果我们要做能量最小化我们的数据项,基本上是看的是平方差。 这和我们之前做的很相似。一种考虑方法是,当我们通过den搜索进行匹配时,我们只看数据项。
 1
1
 2
2
 3
3
 4
4
 5
5
 6
6
 7
7
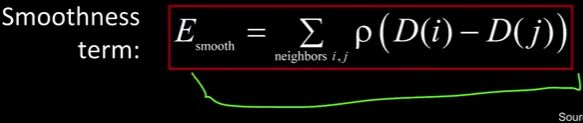
第二项叫做平滑项(如图1)。你会注意到这里没有任何窗口,这里没有任何窗口,我只是看着这里的窗口(如图2)。事实上,在平滑项中,图像根本不在这里(如图3),无论是左边还是右边。我只看到了视差图像中邻居(如图5)的窗户(如图4),这是视差图像,all right。
 1
1
 2
2
 3
3
 4
4
 5
5
这个行函数,这个函数本质上是一个鲁棒范数(robust norm)。所以你想要的是,做少量的改变是可以的,然后当你变得昂贵时,做大的改变,但是做更大的改变不应该变得更昂贵。因为这是一种辅助编辑遮蔽(adjunct edit occlusion)。所以这个行函数是稳健的。我的意思是,你可以把它看成一个平方,这个,这个,这个的最大值。但这是我们的平滑项。
对于能量最小化,我们要做的是我们有一个总能量它是数据项的混合(如图1),平滑项(如图2)由这些系数(如图3)进行加权。你想要找到的,这是困难的部分,你想要找到一个分配差异的方法来最小化这个能量函数。
 1
1
 2
2
 3
3
编程之久除了算法和数据结构,什么也不属于我们。