python opencv入门 轮廓特征(18)
内容来自OpenCV-Python Tutorials 自己翻译整理
目标
轮廓的面积、周长、重心、边界
相关函数
矩
图像矩可以计算图像的质心,面积等等。
图像的矩
函数 cv2.moments()会计算图像的矩,并返回一个字典
(findContours应该返回三个参数,样例里的代码只返回两个,报错了)
import cv2
import numpy as np
img = cv2.imread('3.jpg',0)
ret,thresh = cv2.threshold(img,127,255,0)
img,contours,hierarchy = cv2.findContours(thresh, 1, 2)
cnt = contours[0]
M = cv2.moments(cnt)
print(M)结果
{'m00': 0.0, 'm10': 0.0, 'm01': 0.0, 'm20': 0.0, 'm11': 0.0, 'm02': 0.0, 'm30': 0.0, 'm21': 0.0, 'm12': 0.0, 'm03': 0.0, 'mu20': 0.0, 'mu11': 0.0, 'mu02': 0.0, 'mu30': 0.0, 'mu21': 0.0, 'mu12': 0.0, 'mu03': 0.0, 'nu20': 0.0, 'nu11': 0.0, 'nu02': 0.0, 'nu30': 0.0, 'nu21': 0.0, 'nu12': 0.0, 'nu03': 0.0}(结果居然全是0,轮廓找的不好)
根据这些矩的值可以得到重心
Cx=M10M00
Cy=M01M00
cx = int(M['m10']/M['m00'])
cy = int(M['m01']/M['m00'])轮廓面积
cv2.contourArea()函数可以计算面积,也可以使用矩 M[‘m00’]
import cv2
import numpy as np
img = cv2.imread('3.jpg',0)
ret,thresh = cv2.threshold(img,127,255,0)
img,contours,hierarchy = cv2.findContours(thresh, 1, 2)
cnt = contours[1]
area = cv2.contourArea(cnt)#计算面积
print(area)轮廓周长
使用 cv2.arcLength()计算,第二个参数表示轮廓是闭合(True)还是打开的
import cv2
import numpy as np
img = cv2.imread('3.jpg',0)
ret,thresh = cv2.threshold(img,127,255,0)
img,contours,hierarchy = cv2.findContours(thresh, 1, 2)
cnt = contours[1]
perimeter = cv2.arcLength(cnt,True)
print(perimeter)轮廓近似
将得到的轮廓近似为更少点组成的形状,使用 Douglas-Peucker algorithm
例如要在图像中寻找一个矩形,由于种种原因,不能得到一个完整矩形,现在可以使用此函数,函数的第二个参数epsilon是从原始轮廓到近似轮廓的最大距离,epsilon对结果影响很大。
epsilon = 0.1*cv2.arcLength(cnt,True)
approx = cv2.approxPolyDP(cnt,epsilon,True)凸包
使用cv2.convexHull()来计算凸包,所谓凸包,打个比方,给你一个木板,在木板上面钉一大堆钉子,然后找一根皮筋在上面一围,形成的图形就是凸包。
函数介绍
hull = cv2.convexHull(points[, hull[, clockwise[, returnPoints]]参数
- points为传入轮廓
- hull为输出,通常不需要
- clockwise设置为真顺时针输出凸包
- returnPoints默认为真,返回凸包上的点
import cv2
import numpy as np
img = cv2.imread('3.jpg',0)
ret,thresh = cv2.threshold(img,127,255,0)
img,contours,hierarchy = cv2.findContours(thresh, 1, 2)
cnt = contours[1]
hull = cv2.convexHull(cnt)
print(hull)结果如下
[[[ 44 217]]
[[ 43 218]]
[[ 39 221]]
[[ 36 223]]
[[ 35 223]]
[[ 33 221]]
[[ 28 212]]
[[ 26 208]]
[[ 23 201]]
[[ 18 187]]
[[ 17 183]]
[[ 17 181]]
[[ 26 181]]
[[ 32 184]]
[[ 39 188]]
[[ 42 190]]
[[ 43 191]]
[[ 44 202]]]将returnPoints设置为False则会输出点的索引
import cv2
import numpy as np
img = cv2.imread('3.jpg',0)
ret,thresh = cv2.threshold(img,127,255,0)
img,contours,hierarchy = cv2.findContours(thresh, 1, 2)
cnt = contours[1]
hull = cv2.convexHull(cnt,returnPoints=False)
print(hull)结果如下
[[36]
[35]
[33]
[31]
[30]
[29]
[21]
[19]
[13]
[ 3]
[ 1]
[ 0]
[54]
[48]
[42]
[40]
[39]
[37]]凸检测
检测一个曲线是否是凸的
返回bool值
k = cv2.isContourConvex(cnt)边界矩形(包围盒)
直边界包围盒(AABB包围盒)
就是找到图形对象最高点、最低点、最左点、最右点,画出一个矩形边界
使用函数 cv2.boundingRect()计算
(x,y)为矩形左上角的坐标,(w,h)是矩形的宽和高
x,y,w,h = cv2.boundingRect(cnt)
img = cv2.rectangle(img,(x,y),(x+w,y+h),(0,255,0),2旋转边界包围盒(OBB包围盒)
矩形包围盒的面积最小,考虑到了对象的旋转(原理使用到到了PCA方法,可以去搜)
使用函数cv2.minAreaRect()获得
返回Box2D结构,包含左上角坐标(x,y)矩形宽,高(w,h),以及旋转角度
可以通过cv2.boxPoints()函数绘制
rect = cv2.minAreaRect(cnt)
box = cv2.boxPoints(rect)
box = np.int0(box)
cv2.drawContours(img,[box],0,(0,0,255),2)
绿色的就是直边界包围盒,红色的是最小矩形包围盒
最小外接圆
使用函数 cv2.minEnclosingCircle()得到
返回圆心和半径
(x,y),radius = cv2.minEnclosingCircle(cnt)
center = (int(x),int(y))
radius = int(radius)
img = cv2.circle(img,center,radius,(0,255,0),2)
椭圆拟合
旋转边界的内切圆
ellipse = cv2.fitEllipse(cnt)
cv2.ellipse(img,ellipse,(0,255,0),2)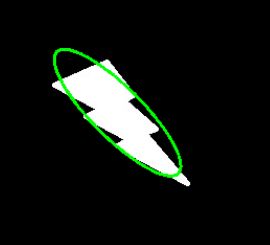
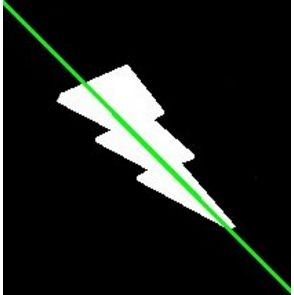
直线拟合
根据图像中的点拟合出一条直线
rows,cols = img.shape[:2]
[vx,vy,x,y] = cv2.fitLine(cnt, cv2.DIST_L2,0,0.01,0.01)
lefty = int((-x*vy/vx) + y)
righty = int(((cols-x)*vy/vx)+y)
cv2.line(img,(cols-1,righty),(0,lefty),(0,255,0),2)