Opencv4 -Python官方教程学习笔记19---轮廓属性
目标
在这里,我们将学习提取一些常用的物体属性,如坚实度,等效直径,掩模图像,平均强度等。更多的功能可以在Matlab regionprops文档中找到。
长宽比
import numpy as np
import cv2 as cv
path = r'D:\PYTHON\timg.jpg'
im = cv.imread(path) #读取图像
imgray = cv.cvtColor(im, cv.COLOR_BGR2GRAY)
ret, thresh = cv.threshold(imgray, 127, 255, 0) #二值化
contours, hierarchy = cv.findContours(thresh, cv.RETR_TREE, cv.CHAIN_APPROX_SIMPLE) #寻找图像轮廓
cnt = contours[0]
x,y,w,h = cv.boundingRect(cnt)
aspect_ratio = float(w)/h
范围
范围是轮廓区域与边界矩形区域的比值。
area = cv.contourArea(cnt) #轮廓区域的面积
x,y,w,h = cv.boundingRect(cnt)
rect_area = w*h #边界框面积
extent = float(area)/rect_area
print(extent)
坚实度
坚实度是等高线面积与其凸包面积之比
area = cv.contourArea(cnt)
hull = cv.convexHull(cnt)
hull_area = cv.contourArea(hull)
solidity = float(area)/hull_area
等效直径
等效直径是面积与轮廓面积相同的圆的直径。
area = cv.contourArea(cnt)
equi_diameter = np.sqrt(4*area/np.pi)
取向
取向是物体指向的角度。以下方法还给出了主轴和副轴的长度。
(x,y),(MA,ma),angle = cv.fitEllipse(cnt)
掩码和像素点
在某些情况下,我们可能需要构成该对象的所有点。可以按照以下步骤完成:
mask = np.zeros(imgray.shape,np.uint8)
cv.drawContours(mask,[cnt],0,255,-1)
pixelpoints = np.transpose(np.nonzero(mask))
#pixelpoints = cv.findNonZero(mask)
最大值,最小值和他们的位置
我们可以使用掩码图像找到这些参数。
min_val, max_val, min_loc, max_loc = cv.minMaxLoc(imgray,mask = mask)
平均颜色和平均强度
在这里,我们可以找到对象的平均颜色。或者可以是灰度模式下物体的平均强度。我们再次使用相同的掩码进行此操作。
mean_val = cv.mean(im,mask = mask)
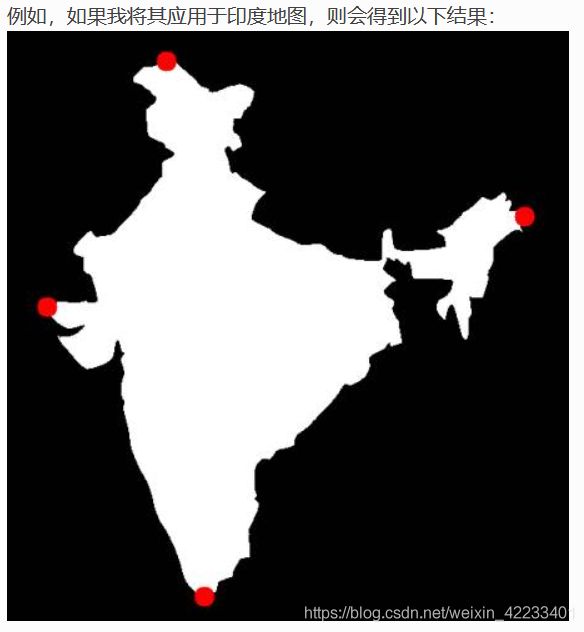
极端点
极点是指对象的最顶部,最底部,最右侧和最左侧的点。
leftmost = tuple(cnt[cnt[:,:,0].argmin()][0])
rightmost = tuple(cnt[cnt[:,:,0].argmax()][0])
topmost = tuple(cnt[cnt[:,:,1].argmin()][0])
bottommost = tuple(cnt[cnt[:,:,1].argmax()][0])