2021应届生DJI校招岗位-电机控制算法工程师的技术笔试——题型介绍与说明
大疆DJI 电机控制算法工程师
写在前面
今天2020.8.16做完了大疆校招岗位电机控制算法工程师的技术笔试,总体发挥感觉欠佳,希望后面有面试的机会把。
选择做的是大疆DJI电机控制算法工程师B卷,总共有两套卷,A卷是在8.6做的,B卷是在8.16做的。说下B卷的题型哈,就两种题型:选择题(10个 40’)和问答题(6个 60’),涉及到的知识点有: 自动控制原理、机械控制工程基础,以及电力电子的模电知识等,总体感觉较难把。6道大题需要画图的就有四道,这也在一定程度上说明了研究生看控制算法也要打好画图的基本功啊。
考题内容与介绍
1.选择题
有涉及Routh判据,矢量坐标变换,以及带通滤波器等,感觉我写的博客内容矢量控制系列,可以涵盖大部分。
2.问答题
涉及
1.七段式和五段式的相电压和线电压的波形绘制(画图上传),以及电压纹波产生的原因和影响,以及解决方案;
2.PWM调制中的异步调制和同步调制有什么不一样,在电机低速和高速情况下,用哪种比较好,为什么?讲解一下,低载波比,电机会有什么影响,怎么样去解决?
3.MTPA+弱磁控制最佳的运动轨迹?(画图)某一种弱磁控制的控制框图(画图)。
4.逆变桥的电路图,还需要提供传感器组成一个完成的驱动部分(画图)
5.针对无位置传感器控制,电机低速启动的控制算法,详细步骤+说明;针对低速向中高速切换的平滑可靠过渡,采取什么样的切换策略,详细的步骤+说明。
6.最后一道题是文字综述表达类的,想不起来了。好像是…,电机控制驱动相关的。
往年考题与介绍
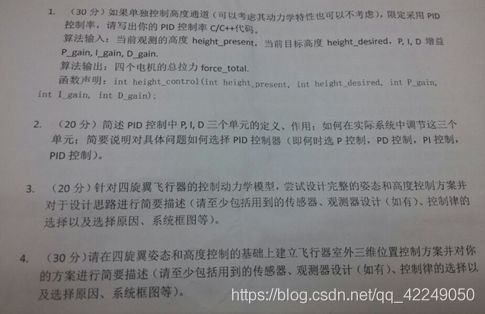
笔试经验:自动控制原理+飞行器总体设计(偏控制),四旋翼最好,可以自己写出控制算法的C/C++的程序,有控制系统嵌入式调试经验(参数整定);对控制领域几种工程上可实现的算法要熟悉,可以直接进行控制器设计(不论被控对象是什么),对控制器的性能参数所代表的实际含义要有认识。
去大疆面试的经验?
【机试题】2019大疆嵌入式笔试题A卷(附超详细解答)
2019 秋招算法面经(含阿里、腾讯、今日头条和大疆公司)
这是往年的试卷发放的技术笔试,可以在网站上直接搜索到把。

-
考察基本的线性控制理论,包括Bode plot, phase plot, 频域和时域,Laplace和Z transform。
稳定性分析:Routh判据,Nyquist曲线图和Bode图 -
控制器的特性:PID, LQR/LQE/LQG等。
LQR(linear–quadratic–regulate)线性二次型调节器
LQE(linear–quadratic–)线性二次状态估计器
LQG(linear–quadratic–Gaussian control) 线性二次高斯控制,是控制理论中的基础最优控制问题之一。与存在加性高斯白噪声的线性系统有关,此问题是要找到最佳的输出回授律,可以让二次费用函数的期望值最小化。其输出量测假设受到高斯噪声的影响,其初值也是高斯随机向量。 -
建模和问题解决能力:给出一个场景例如车辆倒车,要求建立动力学模型和设计控制器。
具体分析如下:
4.根据车辆的6自由度进行分析,例如车辆的前轮转向角度会给出旋转的角速度,并且与位移速度融合。
5.超前滞后校正网络,离散系统、时域频域稳定性判据等众多经典控制理论的内容;
相位超前校正,系统的响应速度将增加,而稳态精度不变。
相频特性——
系统相频特性在低频和高频段均无明显变化,而在中频段相位滞后减少。意味着系统相位裕度增加,系统的稳定性得到改善。
相位滞后校正,系统的响应速度将降低,但稳定性增加,而稳态精度不变。
相频特性——
相位滞后在低频段有较大增加,在中高频段无明显变化
校正后,系统相位穿越频率略有减小,幅值裕度增加,系统稳定性得到改善。
6.对象举例均为四旋翼无人飞行器,各题目要求设计控制器,给出控制率,还有观测方案设计等等;
四旋翼无人飞行器的建模与控制,控制高度的PID控制程序如下:
void altholdPID(float* thrust, const state_t *state, const setpoint_t *setpoint)
{
float newThrust = 0.0;
newThrust = THRUST_SCALE * runPidZ(&posPid.pidVZ, state->position.z, setpoint, POS_UPDATE_DT);
if(getCommanderKeyFlight())
detecWeight(*thrust, newThrust, state->velocity.z);
*thrust = newThrust + posPid.thrustBase;
if (*thrust > 60000)
{
*thrust = 60000;
}
}
static float runPidZ(pidAxis_t *axis, float input, const setpoint_t *setpoint, float dt)
{
float out = 0.f;
if (axis->preMode == false && setpoint->isAltHold == true)
{
positionResetAllPID();
axis->setpoint = input + START_HIRHT;
posPid.thrustBase = limitThrustBase(configParam.thrustBase);
}
axis->preMode = setpoint->isAltHold;
if(setpoint->isAltHold == true)
{
axis->setpoint += setpoint->velocity.z * dt;
out = pidUpdate(&axis->pid, axis->setpoint - input);
}
return out;
}
观测器的设计方案:滑模观测器,状态观测器(全阶和可降阶),干扰观测器以及模型参考自适应观测器、
7.有一题比较简单就是说明PID的各部分含义以及如何调节。何时运用的说明?
答:PID由P、I和D组成,分别是比例调节、积分调节和微分调节。
比例调节是按照偏差的大小比例进行调节,系统一旦出现偏差,则开始作用。即“偏差的大小”。增大比例系数Kp,可以加快系统的调节过程,减小稳态误差,但是过大的比例系数Kp会使得系统振荡,乃至不稳定。
积分调节是将偏差进行累加进行的调节,所以只要存在偏差就有积分调节的作用。即“偏差是否存在”。积分调节主要是为了提高系统的无差度,消除静态误差。积分调节的强弱与积分时间Ti有关,积分时间Ti越小,积分作用就越强,动态响应则变慢。增加一个积分环节相当于给系统增加了一个极点,也会给系统的稳定性带来影响。通常与比例调节和微分调节组合使用为PI、PID控制。
微分调节是按照偏差的变化率来进行调节的,将偏差变化的大小趋势引入到控制中去。即“偏差的变化速度”。可以提前预知系统的变化趋势进而参与的调节,能产生超前的控制作用,在偏差还没有形成之前,已被微分调节作用消除。一般微分调节的强弱与微分时间Td有关,微分时间Td越大,微分作用就越强,动态响应则变快。当然过大的微分时间Td,将会引入干扰的微分信号从而使得系统的鲁棒性变差。增加一个微分环节相当于给系统增加了一个零点,会给系统的动态性能带来影响。当系统无输入时,微分作用的输出则为零,通常与比例调节和积分调节组合使用为PD、PID控制。其中,在微分时间选择合适情况下,可以减少超调,减少调节时间。
总之,比例主要用于偏差的“粗调”,保证控制系统的“稳”;积分主要用于偏差的“细调”,保证控制系统的“准”;微分主要用于偏差的“细调”,保证控制系统的“快”。
PID参数的整定
1.理论计算
依据系统的数学模型,经过理论计算确定控制器参数。这种方法所得到的计算数据未必可以直接用,还必须通过工程实际进行调整和修改。
2.工程整定
PID控制器参数的工程整定方法,主要有临界比例法、反应曲线法和衰减法。
3.自适应整定
将自适应控制思想与PID控制器参数相结合形成的性能优化的自适应变参数整定技术。如模糊控制算法、神经网络、以及自学习等。

模糊自适应PID算法主要是由模糊控制器和PID控制器结合而成,模糊控制器以误差e和误差变化率ec作为输入,利用模糊规则对PID控制器的参数Kp、Ki、和Kd进行自适应整定,使被控对象保持在良好的动、静态稳定状态。相比传统的PID控制,模糊自适应PID更加的灵活稳定,特别是对于时变性和非线性较大的被控对象,其优点更加突出。
4.算法优化与整定
基于目标性能的算法在线整定与优化。
基于遗传算法的PID参数整定
5.模式识别法
模式识别法是提取暂态过程中的一些特征向量,并据此不断修正PID值,模式识别法PID整定开始前,先要预整定,然后在预整定的基础上再进行模式识别法 PID整定。
6.运用工具箱进行的参数整定
https://blog.csdn.net/qq_42249050/article/details/106585161
P、PI、PD和PID控制器的何时运用的说明
各种控制器类型的适用范围
P控制器
适用于小扰动作用下、负载变化不大、控制质量要求不高且允许余差存在的场合
PI控制器
引入积分,可以消除静差。适用于负载变化不大、不允许存在余差的场合
PD控制器
引入微分,可以超前控制。适用于扰动频繁、动作要求响应迅速的场合
PID控制器
可以使系统获得较高的控制质量,它适用于容量滞后大、负荷变化大、控制质量要求较高的场合。