实战篇 | 基于freeRTOS的多任务事件传输demo(附代码)
关注、星标公众号,直达精彩内容

ID:技术让梦想更伟大
作者:李肖遥
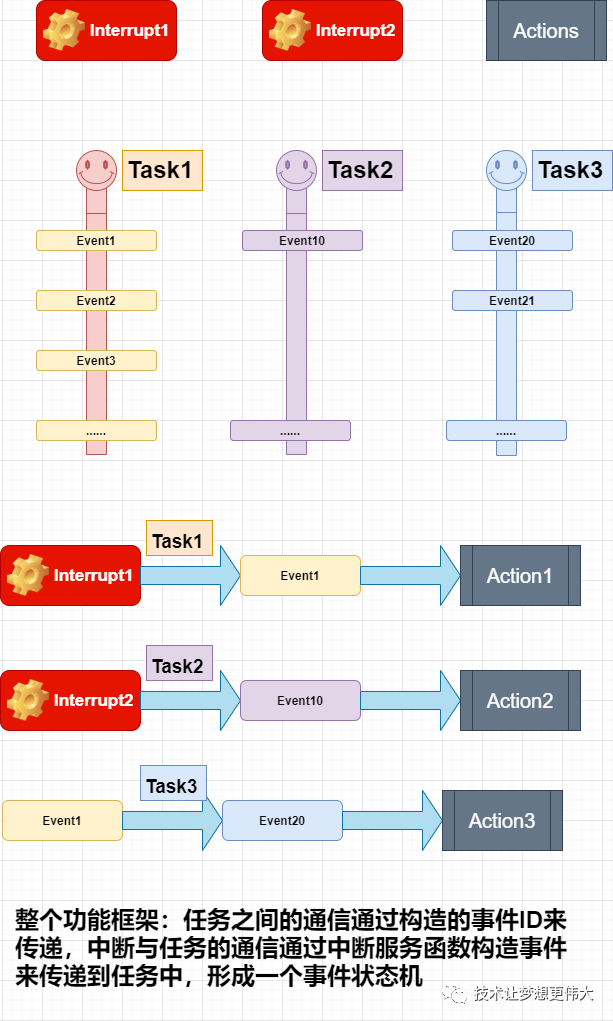
之前分享了很多关于freeRTOS的知识,那么我们怎么在实战中去写代码呢?本篇文章重在对基于freeRTOS的架构代码的解析。整个功能如下图:
为什么要用freeRTOS
在实际项目中,如果程序等待一个超时事件,传统的无RTOS情况下,就只能在原地等待而不能执行其它任务,如果使用RTOS,则可以很方便的将当前任务阻塞在该事件下,然后自动去执行别的任务,这样可以高效的利用CPU了。
一般使用情况
我们在开发的时候,我总是在main函数看到以下的代码,这让我感觉不是很爽
int main()
{
xTaskCreate( vTask1, "Task 1", 1000, NULL, 1, NULL );
xTaskCreate( vTask2, "Task 2", 1000, NULL, 1, NULL );
xTaskCreate( vTask3, "Task 3", 1000, NULL, 2, NULL );
vTaskStartScheduler();
while(1);
}
然后在每个task中,一般代码会这样写
void vTask1( void *pvParameters )
{
volatile unsigned long ul;
for( ;; )
{
xQueueSend( USART1_MSGQ, "task 1 !\n",portMAX_DELAY);
for( ul = 0; ul < mainDELAY_LOOP_COUNT; ul++ );
}
}
而任务之间的通信也是比较繁琐,总体来说,代码不易维护,增减一个任务的话要改的东西太多了。为此我特意设计一个框架,可以很方便的增减任务,同时任务之间通过事件队列来通信。
demo
任务创建函数的封装
我们首先定义两个任务,把所有任务信息封装在taskRecord里,并且申明如下:
#define TASK_NUM 2
//所有任务的信息
static TaskRecord taskRecord[TASK_NUM];
那么TaskRecord怎么安排呢,我们把所有的任务信息都放在结构体里。其中包括任务ID,任务任务函数taskFucn,任务名字,栈的大小stackDep,还有优先级prio,任务句柄taskHandle,任务队列queue。
typedef struct
{
int16_t Id;
TaskFunction_t taskFucn;
const char * name;
configSTACK_DEPTH_TYPE stackDep;
void * parameters;
UBaseType_t prio;
TaskHandle_t taskHandle;
QueueHandle_t queue;
} TaskRecord;
把任务中的一些参数封装起来,放在结构体TaskInitPara,其中包括了任务函数taskFucn,任务名字,栈的大小stackDep,还有优先级prio。
typedef struct
{
TaskFunction_t taskFucn;
const char * name;
const configSTACK_DEPTH_TYPE stackDep;
UBaseType_t prio;
} TaskInitPara;
我们做好了这些之后,就需要把结构体中的参数放到创建任务函数中,那么这个函数createTasks代码如下:
void createTasks(TaskRecord* taskRecord, const TaskInitPara* taskIniPara, int num){
int i;
for(i=0;i其中num为任务数量,先把任务信息放到初始化的taskRecord中,再把其中的信息创建任务。那么任务创建函数就做好了。
main函数
接着,在我们的main函数中,就不需要那么繁琐的一个一个的创建任务了,按照这个封装的main函数如下:
int main( void )
{
createTasks(taskRecord,taskInitPara,TASK_NUM);
/* Start the tasks and timer running. */
vTaskStartScheduler();
}
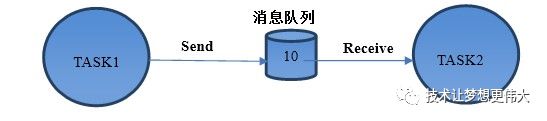
任务间通信
首先我们想想,两个任务之间通信需要知道什么,task1想往task2的发送一些数据,那么需要知道task2的ID吧,需要把数据打包吧,task2需要知道是谁发的,那么task1本身的ID也需要知道吧。
按照这几个明确的东西,我们首先把任务事件ID枚举如下
typedef enum {
eventID_1,
eventID_2,
eventID_3
}Event_ID;
然后把事件ID,发送者ID,以及要传输的结构或者数据打包封装在结构体Event中,代码如下:
typedef struct{
Event_ID ID;
int16_t src; //发送者ID
void* pData; //传结构、数据
}Event;
接着,我们需要构造一个事件,把这些信息都放在这个事件中,代码如下:
void makeEvent(Event* pEvent,int16_t myId,Event_ID evtId, const void* pData){
pEvent->ID = evtId;
pEvent->src = myId;
pEvent->pData = (void*) pData;
}
现在我们假设task2要往task1发送一系列数据,那么task任务中,我们需要做的事如下,获取task1中队列,看是否为空。
QueueHandle_t task1Queue;
int16_t myId = pMyTaskRecord->Id;
task1Queue = getTaskQueue(getTaskId("task1"));
构造事件
Event event;
int* ptemp; //这里自定义一些数据
makeEvent(&event,myId,eventID_1,(void*)ptemp);
然后把事件发送出去:
xQueueSendToBack( task1Queue, &event, 0);
对于task1来说,看队列中是否为空,如果有任务事件来,从队列中获取事件
TaskRecord* pMyTaskRecord = (TaskRecord*)pPara;
QueueHandle_t* evntQueue=pMyTaskRecord->queue;
当队列中确实有事件时,接收事件
BaseType_t status = xQueueReceive( *evntQueue, &event, portMAX_DELAY );
if( status == pdPASS )
{
task1HandleEvent(event);
}
else
{
printf( "Task1 could not receive from the queue.\r\n" );}然后我们在task1HandleEvent处理接收到的事件,代码如下:
void task1HandleEvent(Event event){
xil_printf( "Task1 is processing event...\r\n" );
int* p;
switch(event.ID){
case eventID_1:
p= (int*) event.pData;
xil_printf("ID=%d From: %d data=%d\r\n",event.ID, event.src,p[7]);
free(event.pData);
break;
case eventID_2:
break;
default:
break;
}
}
上面代码表示根据事件ID来判断接收的是哪个事件,再把事件ID,数据等等打印出来。
外部中断通信
如果不是任务间的通信,而是有外部中断触发,需要与某个任务进行信息交互,怎么办?例如有一个以太网任务,当外部网络需要发送一个数据包到这个网络任务的时候,那么就需要进行外部通信了。同样我们这样做,在以太网接收函数中,构造事件
Event event;
int* ptemp; //这里自定义一些数据
makeEvent(&event,myId,IntrID_1,(void*)ptemp);//可以再自定一些事件ID如IntrID_1
然后再发送到这个事件到这个任务中,如下

测试
如上,我们构造一个事件,发送一些数据如下
Event event;
int* ptemp = malloc(sizeof(int)*10);
memset(ptemp,0x77,sizeof(int)*10);
makeEvent(&event,myId,eventID_1,(void*)ptemp);
我们看到结果如下
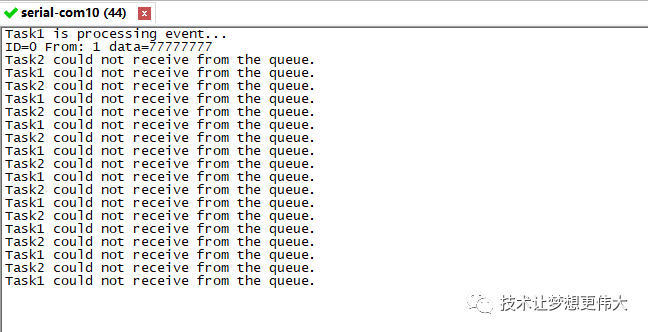
task1接到来自任务ID为0,事件1的数据。这里每个任务的等待时间也是可以设置的,设置方法如下:
/* 设置最大等待时间500ms */
const TickType_t xMaxBlockTime = pdMS_TO_TICKS(500);
BaseType_t status = xQueueReceive( *evntQueue, &event, xMaxBlockTime );
如果等待时间为portMAX_DELAY或者0的话,说明某个任务一直处于激活状态,比如task2,当等待时间为portMAX_DELAY时候,则测试结果如下:

所以每个任务设置的时间,优先级,栈大小都是很重要的,具体的就需要在项目中调试了。
最后总结
本篇是属于代码实战篇,对于freeRTOS的具体讲解需要大家自己去领会,我这里是写了一个架构,帮助大家在项目中去更好的搭好架子,当我们有很多任务的时候,任务间又有很多交互通信的时候,就更需要理解这种架构了。
推荐阅读:
嵌入式编程专辑Linux 学习专辑C/C++编程专辑
Qt进阶学习专辑关注微信公众号『技术让梦想更伟大』,后台回复“m”查看更多内容,回复“加群”加入技术交流群。
长按前往图中包含的公众号关注