dp算法求解矩阵连乘的问题
一:动态规划算法与分治算法的区别
动态规划算法与分治算法的思想类似,都是通过将原问题分成一系列的子问题,并再求解每个子问题,将子问题合并的方式来解决问题。但是分治算法在解决子问题有重叠的问题时,会出现很多重复的不必要的计算。
分治算法适合解决子问题没有重叠的情况,分治算法将问题划分成互不相交的子问题,递归的求解子问题,再将它们组合起来,求出原问题的解。
而动态规划算法适合于子问题重叠的情况,即不同的子问题具有公共的子子问题(子问题的求解是递归进行的,将其划分为更小的子子问题)。顾在这种情况下,分治算法会做很多不必要的计算,他会反复的求解那些公共子问题。而动态规划算法对每个子问题只计算一次,将其解保存在一个表格中,从而无需每次求解一个个子子问题的时候都重新计算,从而可以避免这些重复的工作。[1]
DP算法的设计步奏:
1,刻画一个最优解的结构特征。
2,递归的定义最优解。
3,计算最优解的值,通常采用自底向上的方式。
4,利用计算出的信息构造最优解。[2]
通俗的讲,DP算法的步奏就是:
1,分析问题,找出问题是否能够用DP算法来解决,DP问题具有的两个特点:
a,最优子结构 如果一个问题的最优解包含子问题的最优解,我们就称此问题具有最优解结构性质。[3]
b,重叠子问题 问题的递归算法会反复的求解相同的子问题,而不是一直生成新的子问题,DP算法通常利用这个性质,将每个子问题求解一次,并将解存入一个 表中,当再次需要对这个子问题求解的时候,直接查表使用。[4]
2,,找出问题的递归求解方程
3,根据问题和递归方程,设计合适的数据结构来存放最有代价计算的子问题结果以及最有解的信息。
4,根据最优解的信息构造最有解计算方法。
二:矩阵连乘问题的DP算法解决方法
问题描述:设有n个矩阵相乘A1*A2*A3*A4*..........*An,计算矩阵的结合方式即怎么给矩阵加括号,来使矩阵连乘问题中所需要的计算次数最少。
故矩阵阶数下标为 p0*p1 p1*p2 p2*p3 ........ pi-1*pi ........ pn-1*pn
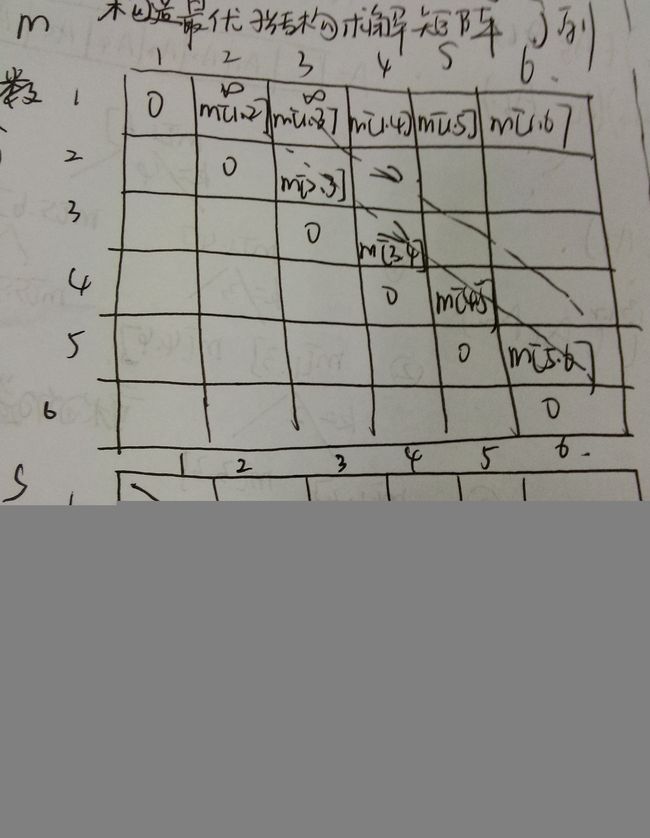
用m[i,j]表示Ai*Ai+1*.........*Aj矩阵连乘的标量乘法的次数,p={p0,p1,p2,p3,..........,pn}表示矩阵阶数;
1,m[i,j]具有最优子结构性质,将矩阵连乘从k(i<=k m[i,j] = m[i,k] + m[k+1 , j] + pi-1 * pk * pj ; 而两个子问题m[i,k]和m[k+1,j]又可以如此划分为最优子结构问题。 记当i=j时,m[i,i]=0; 即矩阵本身不需要标量乘法。 2,为简化问题,设有A1*A2*A3*A4 共4个矩阵连乘,其相乘过程中具有有限个重叠子问题 如下图中,m[1,4]的三种括号计算方法,每一种都会归结到m[1,1],m[2,2],m[3,3],m[4,4]这几个子问题的计算上来,故将该子问题计算结果存入表m中,每次计算的时候对其查表即可。
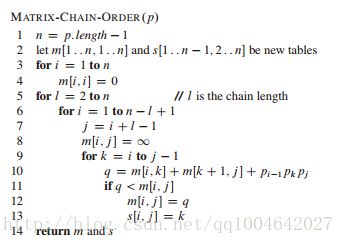
3,矩阵Ai*Ai+1*........*Aj的标量乘法次数根据断开的位置不同,就会有不同的计算结果,应取其中标量乘法次数最少的断开位置,并记录该位置。 递归方程为: m[i,j] = 0 i=j m[i,j] = min(i<=k 根据上诉递归方程,计算最优子问题重用表m和最优子问题信息表s。可以使用二维数组来存放这两张表的信息。 计算表m与表s的伪代码:按照算法导论中给出 该过程计算表m时,按照对角线的方向填写表格m的信息,实现代码如下: 输入为连陈矩阵的下标阶数,输出返回最优化信息矩阵s
4,构造最优解,根据第三步计算的最优解信息矩阵s,构造最优解。 得到矩阵s之后,就可以递归的求解子问题,算法导论给出的伪代码为:
实现代码如下:
[1],[2],[3],[4],出自算法导论第三版
/*
* @param p输入连乘矩阵的阶数 P0,P1,P2,P3.........Pn
*/
public static int[][] optMatrix(int[] p){
int n=p.length;
int[][] m = new int[n][n];
int[][] s = new int[n][n];
for(int i=1;i
学习过程中的笔记,有些地方可能会没那么详细。
/*
* 根据最优化矩阵,构造输出序列
* @param int[][] s 为最优化矩阵
* @param i , j 分别为输入矩阵序列的序号,i