树莓派学习——博通BCM2835芯片手册导读、IO口驱动代码调试和测试学习
一、树莓派寄存器介绍:
-
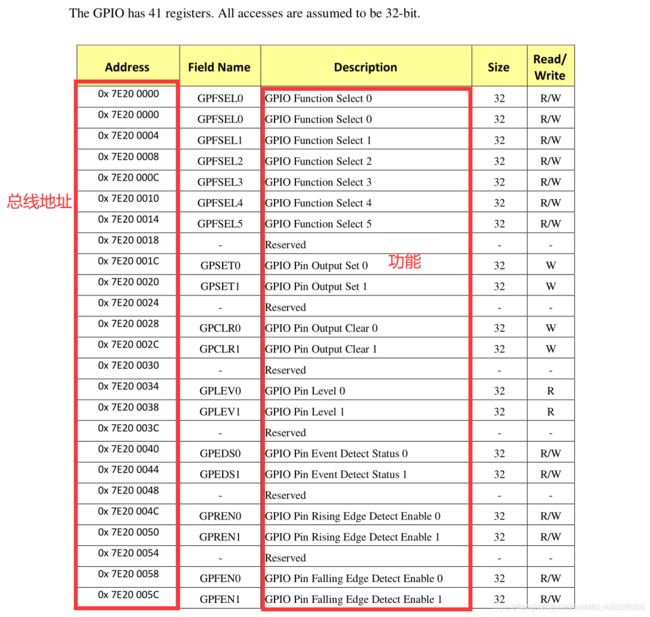
GPFSEL0 GPIO Function Select 0: 功能选择 输入/输出
-
GPSET0 GPIO Pin Output Set 0 : 输出0
-
GPSET1 GPIO Pin Output Set 1 : 输出1
-
0 = No effect
-
1 = Set GPIO pin n
-
GPCLR0 GPIO Pin Output Clear 0: 清零
-
0 = No effect
-
1 = Clear GPIO pin n
-
GPCLR1 GPIO Pin Output Clear 1 :清1
-
每个寄存器都是32位的

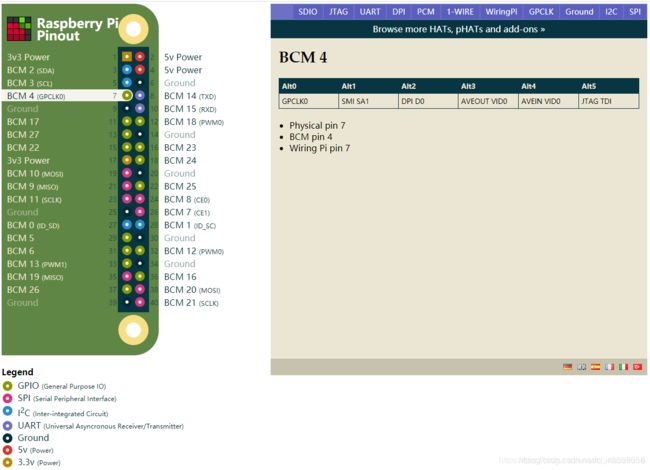
举个例子,例如:我们把引脚5配置位输出引脚
FSEL5 17-15 001 我们把5引脚的17-15配置成001 GPIO Pin 5 is an output
注意:我们配置的底层引脚对应得是BCM
寄存器第0组位 FESL0–9
寄存器第1组位 FSEL10–19
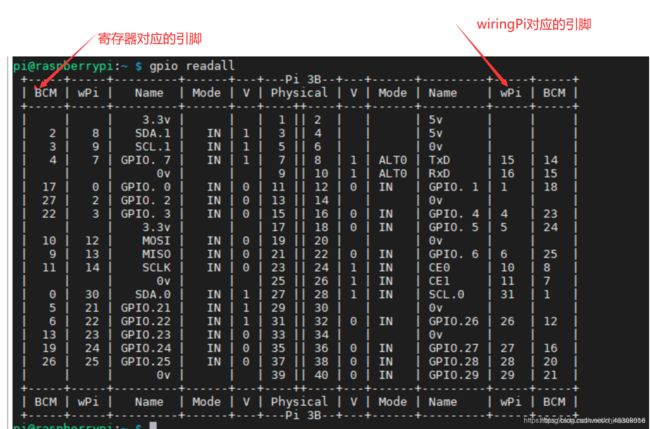
具体的引脚信息可以通过官网查询
树莓派引脚
二、寄存器的地址问题
我们在编写驱动程序的时候,IO空间的起始地址是 0x3f000000 ,加上GPIO的偏移量 0x2000000 ,所以GPIO的物理地址应该是从 0x3f200000 开始的,然后在这个基础上进行Linux系统的MMU内存虚拟化管理,映射到虚拟地址上。

该图的尾部偏移是对的根据GPIO的物理地址0x3f200000可以知道:
-
GPFSEL0 0x3f200000
-
GPSET0 0x3f20001c
-
GPCLR0 0x3f200028
补充:这里我们的地址是物理地址,是操作不了的,所以需要转换成 虚拟地址 ,来进行操作
void __iomem * __ioremap(unsigned long phys_addr, size_t size, unsigned long flags);
ioremap宏定义在asm/io.h内:
#define ioremap(cookie,size) __ioremap(cookie,size,0)
参数:
-
phys_addr:要映射的起始的IO地址
-
size:要映射的空间的大小
-
flags:要映射的IO空间和权限有关的标志
-
该函数返回映射后的内核虚拟地址(3G-4G). 接着便可以通过读写该返回的内核虚拟地址去访问之这段I/O内存资源
三、以 pin5 引脚为例子:
pin5drive.c
#include应用层代码测试 pin5test.c
#include(2)编译驱动代码 pin5drive.c ,放入源码树目录的 /drivers/char 目录下
1、先用 vi Makefile 打开,添加相应pin5 驱动说明

2、编译生成 .ko 文件
ARCH=arm CROSS_COMPILE=arm-linux-gnueabihf- KERNEL=kernel7 make modules

3、把ko文件发送到树莓派上
scp pin5dirve.ko pi@192.168.3.43:/home/pi
4、编译测试代码 pin5test.c 并将其发送到树莓派
arm-linux-gnueabihf-gcc pin5test.c -o pin5test
scp pin5test pi@192.168.3.43:/home/pi
![]()
5、安装 pin5 驱动
sudo insmod pin5drive.ko // 安装驱动,要超级权限
此时 /dev 目录下会有 pin5 :

lsmod // 可查看驱动是否安装

6、此时需要给pin5驱动 加权限,这样应用层才能看到测试信息
sudo chmod 666 /dev/pin5 // 666 为可读可写可操作权限
端口号,设备号都有体现

7、运行测试代码 :
./pin5test
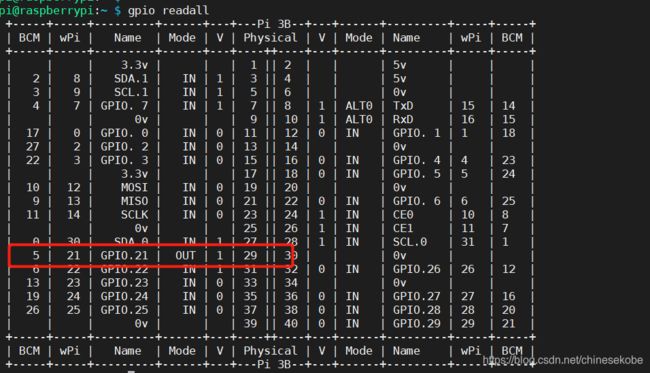
刚开始查看树莓派端口情况:
gpio readall
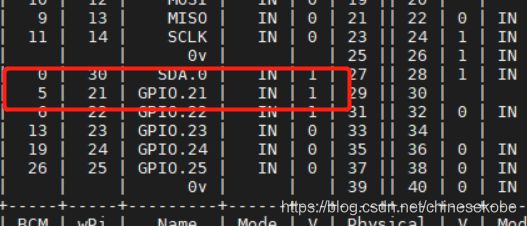
以输入1为例子: