TX1刷机+安装YOLOv3
参考网址:
(1)https://blog.csdn.net/cgt19910923/article/details/80812184
(2)https://blog.csdn.net/c406495762/article/details/70786700
(3)https://blog.csdn.net/qq583083658/article/details/85876621
(4)https://blog.csdn.net/dlphay/article/details/70109388
一.TX1刷机
(1)下载JetPack刷机包
(Nvidia下载地址),需要注册Nvidia官网账户;
(2)主机端(Ubuntu 16.04/14.04)安装
mkdir Jetson_TX1
cd Jetson_TX1
sudo chmod +x JetPack-L4T-3.3-linux-x64_b39.run
./JetPack-L4T-3.3-linux-x64_b39.run
弹出的Warning提示无需理会,点Okay——Next,选择默认安装目录,拒绝用户信息采集,即可开始安装;
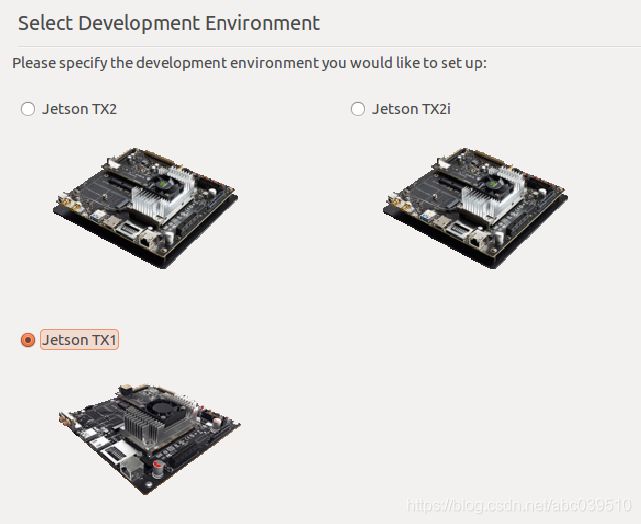
这一步选择板卡对应型号,接下来进行组件安装:
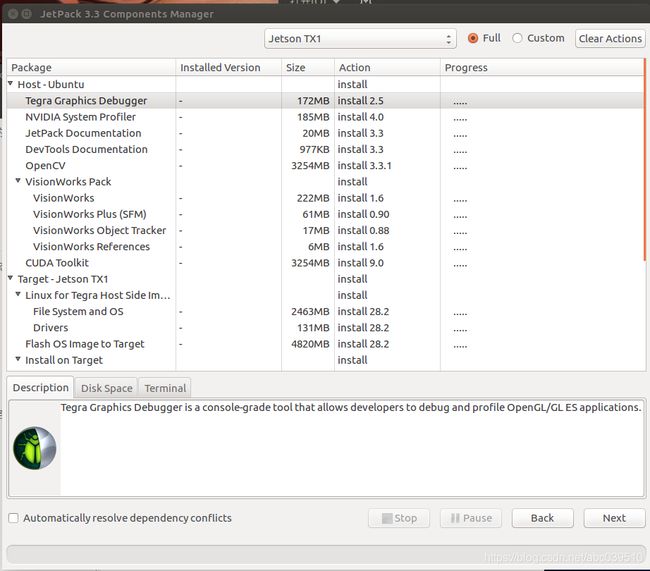
列表包含主机Ubuntu和Jetson TX1两部分,由于主机之前已安装过CUDA、OPENCV等组件,右上角选择Custom模式,将Host-Ubuntu——Action——install单击选择“no-action”。同意各种条款之后即可开始下载并安装,安装完成即可开始转到JetsonTX1端。

(3)JetsonTX1端安装
主机、开发板均通过网线连接到同一个路由器,选择第一种网络连接方式:

选择默认网卡之后,查看待安装组件:

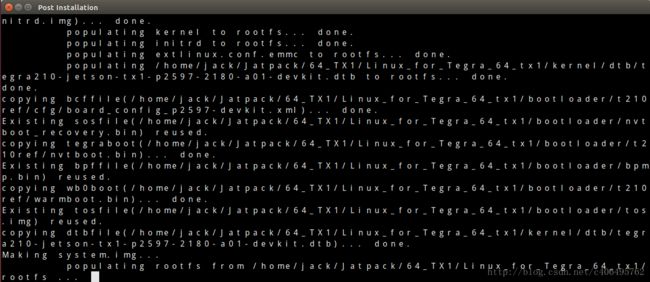
点击Next之后,会出现Post Installation界面。此时,我们就需要将开发板连接到电脑,准备刷机,以下步骤为终端中英文的翻译结果:
1.断开电源,保证开发板处于断电关机状态;
2.用网线连到路由器上,也可插上鼠标键盘;
3.用Micro USB线把开发板连到电脑上(类似于安卓手机连电脑),如果使用的是虚拟机主机,需要在虚拟机-可移动设备中找到英伟达设备,然后选择与虚拟机连接,与主机断开;
4.接通AC电源,按下power键开机;
5.长按rec键不松开,然后点按一下reset键,过2s以后,再松开rec键,此时开发板处于强制恢复模式。
完成以上步骤后,我们还要检查开发板有没有和电脑正确连接,终端输入lsusb 命令,可以看到一些列表,只要发现其中有Nvidia Corp就说明连接正确。我的检查结果如下:

在post installation界面中敲一下enter,就开始了刷机过程:
安装一会儿之后,会出现提示信息,让我们按RESET重启TX1开发板。如果TX1重启后出现了Ubuntu的GUI界面,说明系统已经安装完成。接下来就需要安装CUDA、OpenCV等组件。在按Enter继续安装之前,需要确保TX1已经连网外网,如果校园网需要登录网关这样的,先将网关登录好再继续,因为安装组件的时候,需要安装一些依赖库,需要有外网的情况下才能进行。按Enter继续后,会出现提示信息,确定TX1的IP地址,手动输入TX1的IP地址后,按回车继续,稍等一会儿,会出现如下对话框:
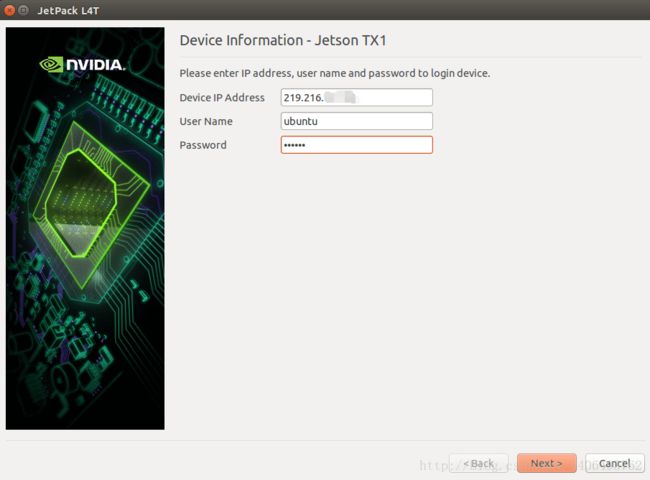
输入Device IP Address,就是之前确定的IP地址,需要用ifconfig命令检查TX1与主机是否处于同一局域网,以确保ssh服务能够正常使用。User Name和Password,都是ubuntu或nvidia。填写完按Next继续,一路Next之后再次进入Post Installation界面,进行安装组件,此时使用SSH远程服务,无需下载线。如下图所示:

图片中是cuda8.0,JetPack3.3已转到cuda9.0,安装即出现以下步骤:

二.安装YOLOv3
(1)安装darknet
git clone https://github.com/pjreddie/darknet
cd darknet/
gedit makefile
需修改部分为:
GPU=1
CUDNN=1
OPENCV=1
NVCC=/usr/local/cuda-8.0/bin/nvcc
另外计算能力选项需要注意,开始编译:make -j4(4核处理器)
(2)下载权重文件
cd catkin_workspace/src/darknet_ros/darknet_ros/yolo_network_config/weights/
COCO data set (Yolo v2):
wget http://pjreddie.com/media/files/yolov2.weights
wget http://pjreddie.com/media/files/yolov2-tiny.weights
VOC data set (Yolo v2):
wget http://pjreddie.com/media/files/yolov2-voc.weights
wget http://pjreddie.com/media/files/yolov2-tiny-voc.weights
Yolo v3:
wget http://pjreddie.com/media/files/yolov3.weights
wget http://pjreddie.com/media/files/yolov3-voc.weights
yolov3-voc链接失效,可以在github网站关注最新进展。另外YOLO官网有权重文件、网络文件下载;
(3)测试
1.测试单张图片:
./darknet detect cfg/yolov3.cfg yolov3.weights data/dog.jpg
2.测试视频:
./darknet detector demo cfg/coco.data cfg/yolov3.cfg yolov3.weights 3.测试外接Webcam摄像头:
./darknet detector demo cfg/coco.data cfg/yolov3.cfg yolov3.weights -c 1
yolov3.cfg和yolov3.weights为coco数据集训练的网络,可识别80类。
4.测试结果
TX1:4fps(YOLO) 12fps(tiny_YOLO)
TX2 : 6.5fps (YOLO) 16fps (tiny_YOLO)
1050 : 23fps (YOLO) 55fps ( tiny_YOLO )
三、基于ROS的YOLOv3安装
darknet_ros官网->https://github.com/leggedrobotics/darknet_ros
安装过程参考->ROS Kinetic + Ubuntu 16.04 yolov3配置
下载自己需要的权重文件和网络文件,编写launch文件并运行。