算法基础:狄克斯特拉算法(基于Python)
本博客所有内容均整理自《算法图解》,欢迎讨论交流~
之前在引入图算法和广度优先搜索的时候,我举了一个旅行最短距离的例子,其实在那一节,广度优先搜索并没有解决那个例子的问题,在这里使用狄克斯特拉算法才可以真正解决赋权图的最短距离问题。
我们依然沿用那个例子。
假设你要从北京到成都去旅游,但是已经买不到北京直达成都的火车票或者飞机票了,于是你决定中转。现在有以下几种中转方案:
1、北京-乌鲁木齐-西安-成都
2、北京-合肥-武汉-成都
3、北京-大连-上海-重庆-成都
4、北京-九江-广州-昆明-成都
我们不考虑价格,仅仅考虑距离,这几种方案哪个距离最短呢?
其实这里我们首先要弄清楚的是,在这几种方案中,每两个城市之间的距离是多少。有了这些距离之后,我们才可以画出每种方案的图,把这些距离标在两个城市之间的连线上。这种边带有权值的图称为赋权图。
找到赋权图中前往X的最短路径,我们常使用狄克斯特拉算法。
1、狄克斯特拉算法的基本概念
关于狄克斯特拉算法的定义,百度百科是这样给出的:狄克斯特拉算法是从一个顶点到其余各顶点的最短路径算法,解决的是有向图中最短路径问题。狄克斯特拉算法主要特点是以起始点为中心向外层层扩展,直到扩展到终点为止。
下面来看看如何对下面的图使用这种算法。

对于上面的图,每条边都有一个权值,在这里代表从有向边的起点到终点所需的时间。如果我们需要找出从起点到达终点的最短路径,就可以使用狄克斯特拉算法来解决这个问题。
在使用狄克斯特拉之前,我们先来看看使用广度优先搜索算法来解决这个问题的结果,如下图所示:

上图中较粗的那一条路径,是使用广度优先搜索算法获得的最短路径,因为该路径只有两段,经过的节点最少,所以广度优先搜索把该路径认定为最短路径,因为广度优先搜索算法只考虑经过的节点最少,不考虑边的权值。
这条路径耗时7分钟,下面来看看使用狄克斯特拉算法能否找到耗时更短的路径!
狄克斯特拉算法算法主要包含四个步骤:
- 找出“最近”的节点,即在最短时间内可到达的节点。
- 更新该节点的邻居的开销。
- 重复这个过程,直到对图中的所有节点都执行过该操作。
- 计算最终路径。
第一步:START,找到最近的节点
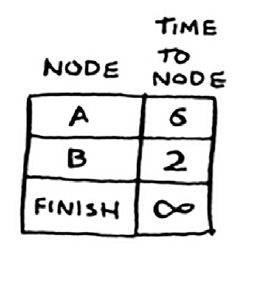
最开始,我们处于点START,此时我们可以前往A点和B点,前往A点需要6个单位时间,前往B点需要2个单位时间。至于其他的节点,此时我们并不知道需要多少单位时间可到达,所以暂时假设为无穷大单位时间。
由于狄克斯特拉算法在第一步是找出“最近”的可在最短时间内到达的节点,所以在此时,我们选择B节点。
第二步:B,更新邻居节点开销
此时我们处于节点B。于是我们首先计算B节点的邻居的距离开销,然后更新各节点的开销。
B节点前往A节点需要3个单位时间,前往终点需要5个单位时间。由于起点到达B节点还需要2个单位时间,所以总时间分别为2+3=5个单位时间和2+5=7个单位时间。
因此开销表更新为:

因此我们找到了一条前往A节点的更近的路径!
第三步:重复!
此时我们开始重复。
重复第一步:找出最近的节点。在第一步时,我们选择了节点B,已经更新了节点B的所有邻居的开销,所以除节点B外,最近的节点就是节点A了。
重复第二步:更新节点A的所有邻居的开销。由于A点前往终点的开销为1个单位时间,所以加上前往节点A的开销,总开销为5+1=6个单位时间!
所以开销表再一次更新:

第四步:计算最终路径
此时我们已经对所有节点都进行了邻居开销的更新了。
所以,我们此时可以来计算最终路径了。根据开销表,前往终点的最短路径的距离为6个单位时间。
最短路径为START->B->A->FINISH。
看完了前面的完整四个步骤,我想大家应该也都发现了,要想使用狄克斯特拉算法,一定得是有向无环图!而且权值必须是正数!因为如果是无向图,则权值是双向的,就很可能导致两个节点互相最近,于是就在两个节点之间无限循环!而有环是同样的道理,一旦有环了,就有可能陷入循环中!
2、狄克斯特拉算法的代码实现
我们依然以下图为例:

编写该问题的代码,我们需要三个散列表:

随着算法的进行,你将不断地更新散列表costs和parents。
首先,我们要思考这样一个问题:我们如何用代码表示costs散列表呢?其实,我们使用双散列表即可,类似于二维数组:
graph = {}
graph["start"]["a"] = 6
graph["start"]["b"] = 2
因此graph["start"]是一个散列表,可以使用graph["start"].keys()来获取起点的所有邻居节点。
下面来添加其他节点及其邻居节点:
graph["a"] = {}
graph["a"]["fin"] = 1
graph["b"] = {}
graph["b"]["a"] = 3
graph["b"]["fin"] = 5
graph["fin} = {}
于是整个图的散列表如下所示:

其中,start,a,b,fin也都是一个散列表。
接下来我们以相同的道理来创建存储开销和存储父节点的散列表。这里存储父节点,是为了最终获得最短路径,因为如果没有存储每一步的父节点,我们在终点就不知道如何回到起点了。
最后,我们还需要一个数组来存储已经处理过的节点。
所以,实现狄克斯特拉算法的Python代码如下所示:
graph = {}
graph["start"]["a"] = 6
graph["start"]["b"] = 2
graph["a"] = {}
graph["a"]["fin"] = 1
graph["b"] = {}
graph["b"]["a"] = 3
graph["b"]["fin"] = 5
graph["fin} = {}
infinity = float("inf")
costs = {}
costs["a"] = 6
costs["b"] = 2
costs["fin"] = infinity
parents = {}
parents["a"] = "start"
parents["b"] = "start"
parents["fin"] = None
def find_lowest_cost_node(costs):
lowest_cost = float("inf")
lowest_cost_node = None
for node in costs:
cost = costs[node]
if cost < lowest_cost and node not in processed:
lowest_cost = cost
lowest_cost_node = node
return lowest_cost_node
node = find_lowest_cost_node(costs)
while node is not None:
cost = costs[node]
neighbors = graph[none]
for n in neighbors.keys():
new_cost = cost + neighbors[n]
if costs[n] > new_cost:
costs[n] = new_cost
parents[n] = node
processed.append(node)
node = find_lowest_cost_node(costs)最终,我们从终点回溯。首先通过parents["fin"]可以得到节点A,然后从parents["a"]可以得到节点B,接着从parents["b"]可以得到起点START。所以,最优路径为START->B->A->FIN。