基于STM32F103系列单片机四路定时器电机编码器模式配置过程附源码
初始化配置函数:
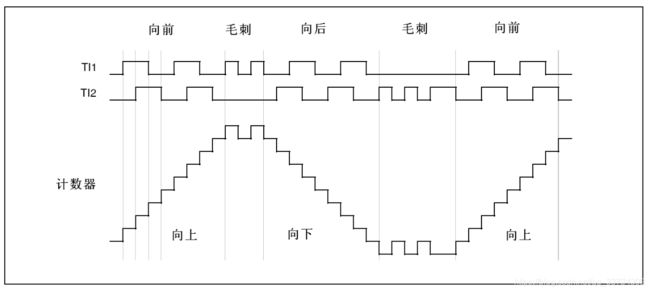
双边沿触发模式(如下图,TI1,TI2的上升沿和下降沿都会进行计数),使用了四个定时器,TIM2,TIM3,TIM4,TIM8,中断是否需要根据自己情况修改,通过查询编码器 TIM2->CNT可知产生的脉冲数,如果用来测速,可以定时读取计数值并清零,速度=脉冲数/时间(单位自己确定),总体来说STM32的编码器器方式还是挺方便的,硬件自动计数无需软件计数,需要注意的就是计数器的临界值0和65536,都会触发溢出中断,为了防止电机启动瞬间抖动造成的误判断,需要自己写个判断的函数,最好再加个软件上的滤波算法
void ENC_Init1(void)
{
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_ICInitTypeDef TIM_ICInitStructure;
GPIO_InitTypeDef GPIO_InitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA | RCC_APB2Periph_AFIO, ENABLE);
GPIO_StructInit(&GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0 | GPIO_Pin_1;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
TIM_DeInit(TIM2);
TIM_TimeBaseStructInit(&TIM_TimeBaseStructure);
TIM_TimeBaseStructure.TIM_Period = (4*ENCODER2_PPR)-1;
TIM_TimeBaseStructure.TIM_Prescaler = 0;
TIM_TimeBaseStructure.TIM_ClockDivision = TIM_CKD_DIV1;
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up;
TIM_TimeBaseInit(TIM2, &TIM_TimeBaseStructure);
TIM_EncoderInterfaceConfig(TIM2, TIM_EncoderMode_TI12, TIM_ICPolarity_BothEdge, TIM_ICPolarity_BothEdge);
TIM_ICStructInit(&TIM_ICInitStructure);
TIM_ICInitStructure.TIM_ICFilter = ICx_FILTER;
TIM_ICInit(TIM2, &TIM_ICInitStructure);
NVIC_InitStructure.NVIC_IRQChannel =TIM2_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 2;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1; //0
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
TIM_ClearFlag(TIM2, TIM_FLAG_Update);
TIM_ITConfig(TIM2, TIM_IT_Update, ENABLE);
TIM2->CNT = 0;
TIM_Cmd(TIM2, ENABLE);
}
void ENC_Init2(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_ICInitTypeDef TIM_ICInitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA | RCC_APB2Periph_AFIO, ENABLE);
GPIO_StructInit(&GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6 | GPIO_Pin_7;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
TIM_DeInit(TIM3);
TIM_TimeBaseStructInit(&TIM_TimeBaseStructure);
TIM_TimeBaseStructure.TIM_Period = (4*ENCODER2_PPR)-1;
TIM_TimeBaseStructure.TIM_Prescaler = 0;
TIM_TimeBaseStructure.TIM_ClockDivision =TIM_CKD_DIV1 ;
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up;
TIM_TimeBaseInit(TIM3, &TIM_TimeBaseStructure);
TIM_EncoderInterfaceConfig(TIM3, TIM_EncoderMode_TI12, TIM_ICPolarity_BothEdge ,TIM_ICPolarity_BothEdge);
TIM_ICStructInit(&TIM_ICInitStructure);
TIM_ICInitStructure.TIM_ICFilter = ICx_FILTER;
TIM_ICInit(TIM3, &TIM_ICInitStructure);
NVIC_InitStructure.NVIC_IRQChannel =TIM3_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 2;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
TIM_ClearFlag(TIM3, TIM_FLAG_Update);
TIM_ITConfig(TIM3, TIM_IT_Update, ENABLE);
TIM3->CNT = 0;
TIM_Cmd(TIM3, ENABLE);
}
void ENC_Init3(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_ICInitTypeDef TIM_ICInitStructure;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM4, ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE);
GPIO_StructInit(&GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6 | GPIO_Pin_7;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure);
TIM_DeInit(TIM4);
TIM_TimeBaseStructInit(&TIM_TimeBaseStructure);
TIM_TimeBaseStructure.TIM_Period = (4*ENCODER2_PPR)-1;
TIM_TimeBaseStructure.TIM_Prescaler = 0;
TIM_TimeBaseStructure.TIM_ClockDivision =TIM_CKD_DIV1;
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up;
TIM_TimeBaseInit(TIM4, &TIM_TimeBaseStructure);
TIM_EncoderInterfaceConfig(TIM4, TIM_EncoderMode_TI12, TIM_ICPolarity_BothEdge ,TIM_ICPolarity_BothEdge);
TIM_ICStructInit(&TIM_ICInitStructure);
TIM_ICInitStructure.TIM_ICFilter = ICx_FILTER;
TIM_ICInit(TIM4, &TIM_ICInitStructure);
TIM_ClearFlag(TIM4, TIM_FLAG_Update);
TIM_ITConfig(TIM4, TIM_IT_Update, ENABLE);
TIM4->CNT = 0;
TIM_Cmd(TIM4, ENABLE);
}
void ENC_Init4(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_ICInitTypeDef TIM_ICInitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOC | RCC_APB2Periph_TIM8, ENABLE);
GPIO_StructInit(&GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6 | GPIO_Pin_7;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOC, &GPIO_InitStructure);
TIM_DeInit(TIM8);
TIM_TimeBaseStructInit(&TIM_TimeBaseStructure);
TIM_TimeBaseStructure.TIM_Period = (4*ENCODER2_PPR)-1;
TIM_TimeBaseStructure.TIM_Prescaler = 0;
TIM_TimeBaseStructure.TIM_ClockDivision =TIM_CKD_DIV1;
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up;
TIM_TimeBaseInit(TIM8, &TIM_TimeBaseStructure);
TIM_EncoderInterfaceConfig(TIM8, TIM_EncoderMode_TI12, TIM_ICPolarity_BothEdge ,TIM_ICPolarity_BothEdge);
TIM_ICStructInit(&TIM_ICInitStructure);
TIM_ICInitStructure.TIM_ICFilter = ICx_FILTER;
TIM_ICInit(TIM8, &TIM_ICInitStructure);
TIM_ClearFlag(TIM8, TIM_FLAG_Update);
TIM_ITConfig(TIM8, TIM_IT_Update, ENABLE);
TIM8->CNT = 0;
TIM_Cmd(TIM8, ENABLE);
}
计数溢出中断函数:
void TIM2_IRQHandler (void)//执行TIM4(电机A编码器采集)计数中断
{
TIM_ClearFlag(TIM2, TIM_FLAG_Update);
}
void TIM3_IRQHandler (void)//执行TIM3(电机B编码器采集)计数中断
{
TIM_ClearFlag(TIM3, TIM_FLAG_Update);
}