树结构大全
文章目录
- 说明
- 树结构的一些基本定义
- 树结构的性质
- 二叉树(Binary-Tree)
- 二叉树的定义
- 满二叉树与完全二叉树
- 二叉树的性质
- 结点定义
- 二叉树的创建
- 二叉树的遍历
- 二叉树的深度
- 二叉树叶子结点个数
- 二叉排序树(Binary-Sort-Tree)
- 什么是二叉排序树
- 二叉排序树的查找
- 最低公共祖先
- 二叉排序树 VS 二叉堆(Binary-Heap)
- 两者的相同点与不同点
- 最大堆的一些基本操作(Max-Heap)
- 最大索引堆(Max-Heap-Index)
- 堆排序
- 二分搜索树(Binary-Search-Tree)
- 什么是二分搜索树
- 二分搜索树的一些基本操作
- 四叉树(Quad-Tree)
- 什么是四叉树
- 四叉树的一些应用
- 八叉树(Octree)
- kd 树(Kd-Tree)
- 红黑树(Red-Black-Tree)
- 哈夫曼树(Huffman-Tree)
说明
- 主要讲解二叉树及其相关内容
- 次要说明其他树结构
- 以后会进行不定期更新
主要参考以下书籍
- 程序员面试笔记
- 慕课网:数据算法与结构
- 其他…
树结构的一些基本定义
示意图
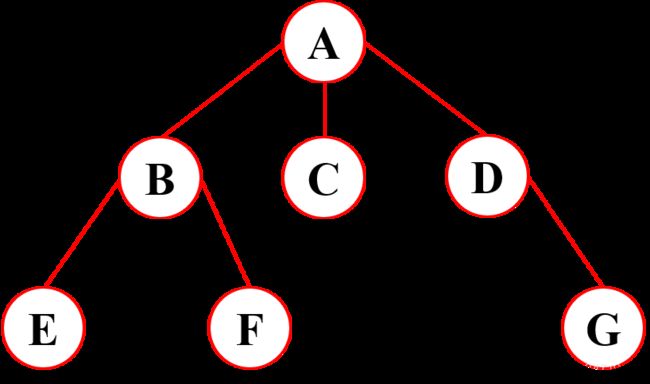
- 结点的度:结点拥有的子树的数目。eg:结点 A 的度为3
- 树的度:树种各结点度的最大值。eg:树的度为3
- 叶子结点:度为 0 的结点。g:E、F、C、G 为叶子结点
- 孩子结点:一个结点的子树的根节点。eg:B、C、D 为 A 的子结点
- 双亲结点:B 为 A 的子结点,那么 A 为 B 的双亲结点
- 兄弟结点:一个双亲结点结点的孩子互为兄弟结点。eg:B、C、D 为兄弟结点
- 结点的层次:根节点为第一层,子结点为第二层,依次向下递推…eg:E、F、G 的层次均为 3
- 树的深度:树种结点的最大深度。eg:该树的深度为 3
- 森林:m 棵互不相交的树称为森林
树结构的性质
- 非空树的结点总数等于树种所有结点的度之和加 1
- 度为 K 的非空树的第 i 层最多有 ki-1 个结点(i >= 1)
- 深度为 h 的 k 叉树最多有(kh - 1)/(k - 1)个结点
- 具有 n 个结点的 k 叉树的最小深度为 logk(n(k-1)+1))
二叉树(Binary-Tree)
二叉树的定义
二叉树是一种特殊的树:它或者为空,或者由一个根节点加上根节点的左子树和右子树组成,这里要求左子树和右子树互不相交,且同为二叉树,很显然,这个定义是递归形式的。
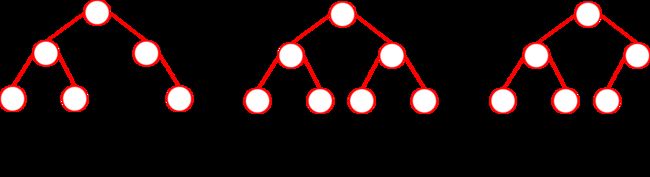
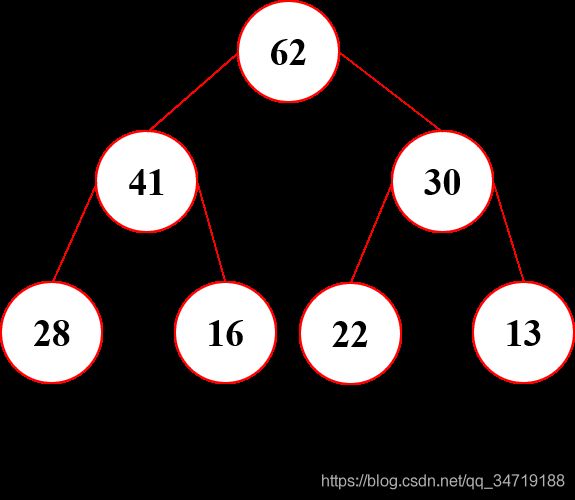
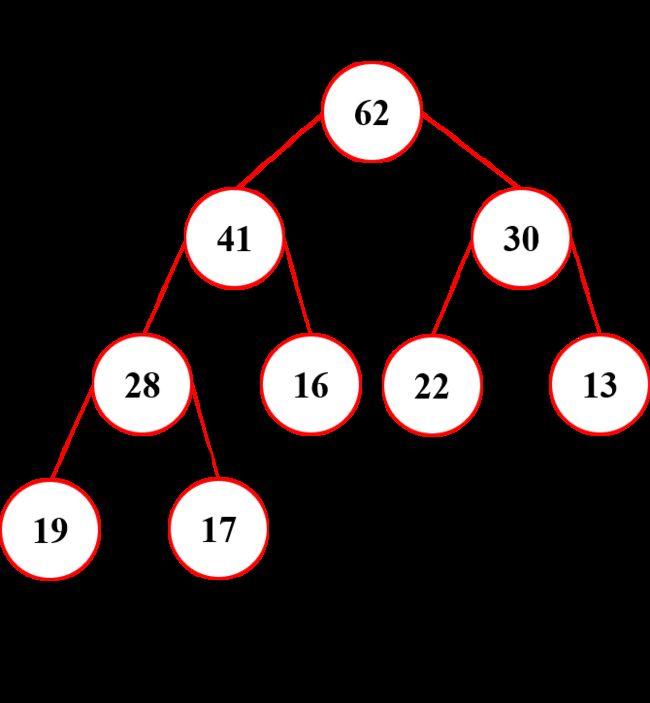
满二叉树与完全二叉树
满二叉树: 如果一棵二叉树的任意一个结点或者是叶子结点,或者有两棵子树,同时叶子结点都集中在二叉树的最下面一层上,这样的二叉树称为满二叉树
完全二叉树: 若二叉树中最多只有最下面两层结点的度小于 2 ,并且最下面一层的结点(叶子结点)都依次排列在该层最左边的位置上,具有这样结构特点的树结构称为完全二叉树。
二叉树的性质
- 在二叉树中第 i 层上至多有 2i-1 个结点(i >=1)
- 深度为 k 的二叉树至多有 2k-1 个结点(k >=1)
- 对于任何一棵二叉树,如果其叶子结点数为 n0 ,度为 2 的结点数为 n2 ,那么 n0 = n2 + 1
- 具有 n 个结点的完全二叉树的深度为 log2n + 1
结点定义
typedef struct BiTNode{
ElemType data;
struct BiTNode * lchild, * rchild;
} BiTNode, *BiTree;
二叉树的创建
/*创建一棵二叉树*/
void CreatBiTree(BiTree *T) {
char c;
scanf("%c", &c);
if(c == ' ') *T = NULL;
else {
*T = (BiTNode * )malloc(sizeof(BiTNode)); /*创建根结点*/
(*T)->data = c; /*向根结点中输入数据*/
CreatBiTree(&((*T)->lchild)); /*递归地创建左子树*/
CreatBiTree(&((*T)->rchild)); /*递归地创建右子树*/
}
}
二叉树的遍历
基于深度遍历二叉树
分为先序(DLR)、中序(LDR)、后序遍历(LRD)
#include "stdio.h"
#include "malloc.h"
typedef struct BiTNode {
char data; /*结点的数据域*/
struct BiTNode *lchild, *rchild; /*指向左孩子和右孩子*/
} BiTNode, *BiTree;
/*创建一棵二叉树*/
void CreatBiTree(BiTree *T) {
char c;
scanf("%c", &c);
if(c == ' ') *T = NULL;
else {
*T = (BiTNode * )malloc(sizeof(BiTNode)); /*创建根结点*/
(*T)->data = c; /*向根结点中输入数据*/
CreatBiTree(&((*T)->lchild)); /*递归地创建左子树*/
CreatBiTree(&((*T)->rchild)); /*递归地创建右子树*/
}
}
/*前序遍历二叉树*/
void PreOrderTraverse(BiTree T ) {
if(T) { /*递归结束条件,T为空*/
printf("%3c", T->data); /*访问根结点,将根结点内容输出*/
PreOrderTraverse(T->lchild); /*先序遍历T的左子树*/
PreOrderTraverse(T->rchild); /*先序遍历T的右子数*/
}
}
/*中序遍历二叉树*/
void InOrderTraverse(BiTree T) {
if(T) { /*如果二叉树为空,递归遍历结束*/
InOrderTraverse(T->lchild); /*中序遍历T的左子树*/
printf("%3c", T->data); /*访问根结点*/
InOrderTraverse(T->rchild); /*中序遍历T的右子数*/
}
}
/*后序遍历二叉树*/
void PosOrderTraverse(BiTree T) {
if(T) { /*如果二叉树为空,递归遍历结束*/
PosOrderTraverse(T->lchild); /*后序遍历T的左子树*/
PosOrderTraverse(T->rchild); /*后序遍历T的右子数*/
printf("%3c", T->data); /*访问根结点*/
}
}
int main() {
BiTree T = NULL; /*最开始T指向空*/
printf("Input some characters to create a binary tree\n");
CreatBiTree(&T); /*创建二叉树*/
printf("The squence of preorder traversaling binary tree\n");
PreOrderTraverse(T); /*先序遍历二叉树*/
printf("\nThe squence of inorder traversaling binary tree\n");
InOrderTraverse(T); /*中序遍历二叉树*/
printf("\nThe squence of posorder traversaling binary tree\n");
PosOrderTraverse(T); /*后序遍历二叉树*/
getchar();
getchar();
}
基于层次遍历二叉树
方法一
#include "stdio.h"
typedef struct BiTNode {
char data; /*结点的数据域*/
struct BiTNode *lchild, *rchild; /*指向左孩子和右孩子*/
} BiTNode, *BiTree;
/*创建一棵二叉树*/
void CreatBiTree(BiTree *T) {
char c;
scanf("%c", &c);
if(c == ' ') *T = NULL;
else {
*T = (BiTNode * )malloc(sizeof(BiTNode)); /*创建根结点*/
(*T)->data = c; /*向根结点中输入数据*/
CreatBiTree(&((*T)->lchild)); /*递归地创建左子树*/
CreatBiTree(&((*T)->rchild)); /*递归地创建右子树*/
}
}
/*遍历二叉树*/
void PreOrderTraverse(BiTree T ) {
if(T) { /*递归结束条件,T为空*/
printf("%3c", T->data); /*访问根结点,将根结点内容输出*/
PreOrderTraverse(T->lchild); /*先序遍历T的左子树*/
PreOrderTraverse(T->rchild); /*先序遍历T的右子数*/
}
}
void visit(BiTree p) {
printf("%3c", p->data);
}
void layerOrderTraverse(BiTree T) {
BiTree queue[20], p;
int front, rear;
if(T != NULL) {
queue[0] = T; /*将根结点的指针(地址)入队列*/
front = -1;
rear = 0;
while(front < rear) { /*当队列不为空时进入循环*/
p = queue[++front]; /*取出队头元素*/
visit(p); /*访问p指向的结点元素*/
if(p->lchild != NULL) /*将p结点的左孩子结点指针入队列*/
queue[++rear] = p->lchild;
if(p->rchild != NULL) /*将p结点的右孩子结点指针入队列*/
queue[++rear] = p->rchild;
}
}
}
main() {
BiTree T = NULL; /*最开始T指向空*/
printf("Input some characters to create a binary tree\n");
CreatBiTree(&T); /*创建二叉树*/
printf("\nThe squence of layerorder traversaling binary tree\n");
layerOrderTraverse(T);
getchar();
getchar();
}
方法二
void layerOrderTraverse(BiTree T){
BiTree p;
queue<BiTree> q;
if(T != NULL){
q.push(T);
while(!q.empty()){
p = q.front();
q.pop();
visit(p); // 自定义访问操作
if(p->lchild != NULL)
q.push(p->lchild);
if(p->rchild != NULL)
q.push(p->rchild);
}
}
}
二叉树的深度
方法一
#include "stdio.h"
#include "malloc.h"
typedef struct BiTNode{
char data; /*结点的数据域*/
struct BiTNode *lchild , *rchild; /*指向左孩子和右孩子*/
} BiTNode , *BiTree;
/*创建一棵二叉树*/
void CreatBiTree(BiTree *T)
{
char c;
scanf("%c",&c);
if(c == ' ') *T = NULL;
else{
*T = (BiTNode * )malloc(sizeof(BiTNode)); /*创建根结点*/
(*T)->data = c; /*向根结点中输入数据*/
CreatBiTree(&((*T)->lchild)); /*递归地创建左子树*/
CreatBiTree(&((*T)->rchild)); /*递归地创建右子树*/
}
}
/*计算二叉树的深度*/
void getDepth(BiTree T,int n,int *level)
{
if(T!=NULL)
{
if(n> *level)
{
*level = n;
}
getDepth(T->lchild,n+1,level);
getDepth(T->rchild,n+1,level);
}
}
int getBitreeDepth(BiTree T)
{
int level = 0;
int n = 1;
getDepth(T,n,&level);
return level ;
}
main()
{
BiTree T = NULL; /*最开始T指向空*/
printf("Input some characters to create a binary tree \n");
CreatBiTree(&T); /*创建二叉树*/
printf("\nThe depth of the binary tree is %d\n",getBitreeDepth(T));
getchar() ;
getchar() ;
}
方法二
int getBitreeDepth(BiTree T){
int leftHeight, rightHeight, maxHeight;
if(T != NULL){
leftHeight = getBitreeDepth(T->lchild); // 计算左子树的深度
rightHeight = getBitreeDepth(T->rchild); // 计算右子树的深度
maxHeight = leftHeight > rightHeight ? leftHeight : rightHeight; // 比较左右子树的深度
return maxHeight + 1; // 返回二叉树的深度
else{
return 0;
}
}
二叉树叶子结点个数
#include "string.h"
#include "stdio.h"
#include "malloc.h"
typedef struct BiTNode{
char data; /*结点的数据域*/
struct BiTNode *lchild , *rchild; /*指向左孩子和右孩子*/
} BiTNode , *BiTree;
void CreatBiTree(BiTree *T){
char c;
scanf("%c",&c);
if(c == ' ') *T = NULL;
else{
*T = (BiTNode * )malloc(sizeof(BiTNode)); /*创建根结点*/
(*T)->data = c; /*向根结点中输入数据*/
CreatBiTree(&((*T)->lchild)); /*递归地创建左子树*/
CreatBiTree(&((*T)->rchild)); /*递归地创建右子树*/
}
}
void getLeavesConut (BiTree T,int *count){
if(T!=NULL && T->lchild==NULL && T->rchild==NULL){ /*访问到叶结点*/
*count = *count + 1;
}
if(T){
getLeavesConut (T->lchild,count); /*先序遍历T的左子树*/
getLeavesConut (T->rchild,count); /*先序遍历T的右子数*/
}
}
int getBiTreeLeavesCount(BiTree T) {
int count = 0; /*在主调函数中定义变量count,初始值为0*/
getLeavesConut(T, &count); /*调用递归函数getLeavesConut计算叶子结点个数*/
return count; /*返回叶子结点个数*/
}
main()
{
BiTree T = NULL; /*初始化T */
int count = 0;
printf("Input some characters to create a binary tree \n");
CreatBiTree(&T); /*创建一棵二叉树*/
getLeavesConut (T,&count); /*计算二叉树中叶子结点的个数 */
printf("The number of leaves of BTree are %d\n",count);
getchar();
getchar();
}
二叉排序树(Binary-Sort-Tree)
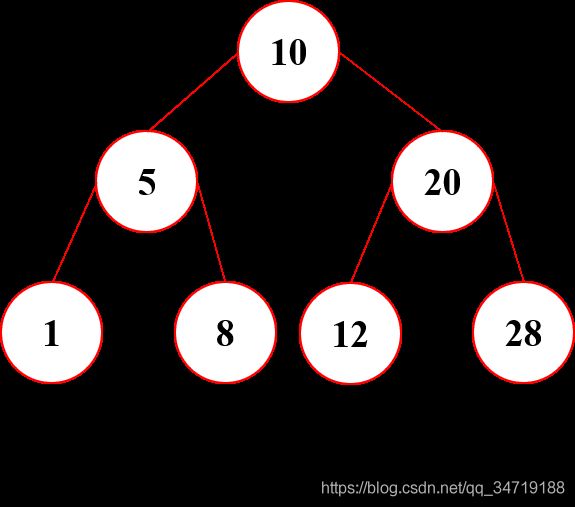
什么是二叉排序树
二又排序树或者为一棵空树,或者是具有下列性质的二又树:
- 若它的左子树不为空,则左子树上的所有结点的值均小于根结点的值
- 若它的右子树不为空,则右子树上的所有结点的值均大于根节点的值
- 二叉排序树的左右子树也都是二叉排序树
二叉排序树的查找
BiTree SearchBST(BiTree T, dataTYpe){
if(T == NULL)
return NULL;
if(T->data == key)
return T;
if(key < T->data)
return SearchBST(T-> lchild, key);
else
return SearchBST(T-> rchild, key);
}
最低公共祖先
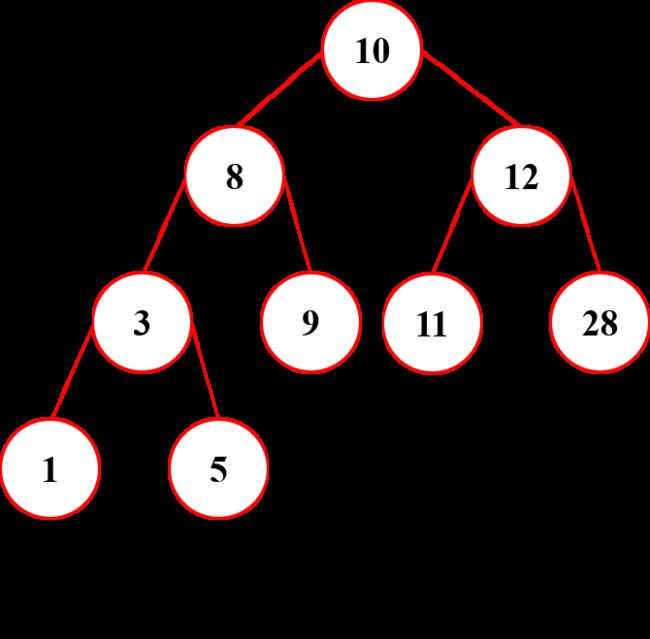
分析
从整棵二又排序树的根结点出发,
当访间的当前结点同时大于给定的两个结点时、沿左指前进;
当访间的当前结点同时小于給定的两个结点时,沿右指针前进;
当第一次访问到介于给定的两个结点值之间的那个结点时即是它们的最低公共祖先结点
然鹅,这个算法并不完善,因为这个算法适用的前提是给定的两个结点分别位于二叉排序树中某个结点的左右子树上
假设给定的两个结点分别为a和b,并且 a 是 b 的祖先,那么结点 a 和 b 的最低公共祖先就是 a 的父结点,因为 a 的父结点一定也是 b 的祖先,同时该结点也必然是 a 和 b 的最低公共祖先。
另外,如果给定的 a 或 b 其中一个为根结点的值,那么这种情况是不存在公共最低祖先的,因为根结点没有祖先,所以也应把这种情况考虑进去。
#include "stdio.h"
#include "malloc.h"
#include "string.h"
typedef struct BiTNode{
int data; /*结点的数据域*/
struct BiTNode *lchild;
struct BiTNode *rchild; /*指向左孩子和右孩子*/
} BiTNode , *BiTree;
int findLowestCommonAncestor(BiTree T,int value1, int value2) {
BiTree curNode = T; /*curNode为当前访问结点,初始化为T*/
if(T->data == value1 || T->data == value2) {
return -1; /*value1和value2有一个为根结点,因此没有公共祖先,返回-1*/
}
while(curNode != NULL){
if (curNode->data > value1 &&
curNode->data > value2 && curNode->lchild->data != value1 &&
curNode->lchild->data != value2) {
/*当前结点的值同时大于value1和value2,且不是value1和value2的父结点*/
curNode = curNode->lchild;
} else if (curNode->data < value1 &&
curNode->data < value2 && curNode->rchild->data != value1 &&
curNode->rchild->data != value2) {
/*当前结点的值同时小于value1和value2,且不是value1和value2的父结点*/
curNode = curNode->rchild;
} else {
return curNode->data; /*找到最低公共祖先*/
}
}
}
void CreatBiTree(BiTree *T){
int d;
scanf("%d",&d);
if(d == 0) *T = NULL;
else{
*T = (BiTNode * )malloc(sizeof(BiTNode)); /*创建根结点*/
(*T)->data = d; /*向根结点中输入数据*/
CreatBiTree(&((*T)->lchild)); /*递归地创建左子树*/
CreatBiTree(&((*T)->rchild)); /*递归地创建右子树*/
}
}
main()
{
BiTree T;
int value1,value2;
int ancestorValue;
printf("Please create a binary sort tree\n");
CreatBiTree(&T);
printf("Input two values for searching lowest common ancestor\n");
scanf("%d,%d",&value1,&value2);
ancestorValue = findLowestCommonAncestor(T,value1,value2);
if (ancestorValue != -1) {
printf("The lowest common ancestor is %d\n", ancestorValue);
} else {
printf("There is no ancestor\n");
}
getchar();
}
二叉排序树 VS 二叉堆(Binary-Heap)
两者的相同点与不同点
相同点
二叉堆也是一种树结构
不同点
- 任何一个结点都不大于父亲节点(亦即左右结点均不大于父节点)
- 必须是一棵完全二叉树(结点必须集中在最左侧),亦即最大堆
- 用数组存储二叉堆,原因在于满二叉树的结点索引存在倍数关系
关系描述为:左结点是父节点的 2 倍,右结点为父节点的 2 倍 加 1(根结点的序列为 1)
二叉堆主要表现为最大堆(Max-Heap),主要涉及以下内容
最大堆的一些基本操作(Max-Heap)
- 创建
- 删除
- 元素个数
- 插入
- 堆顶元素
- 最大元素
#include 最大索引堆(Max-Heap-Index)
#include 堆排序
#include 二分搜索树(Binary-Search-Tree)
什么是二分搜索树
二分搜索树具有以下特点
- 依然是一棵二叉树
- 每个结点大与左孩子
- 每个结点大于右孩子
- 以左右孩子为根的子树仍然是二分搜索树
- 不存在相同的结点
- 不一定是完全二叉树
- 用 Node 结点来表示
二分搜索树的一些基本操作
- 创建
- 删除
- 结点个数
- 插入
- 判断是否存在一个元素
- 前序遍历
- 中序遍历
- 后序遍历
- 删除最大值
- 删除最小值
- 删除指定值
#include 四叉树(Quad-Tree)
什么是四叉树
参考博客:四叉树空间索引原理及其实现
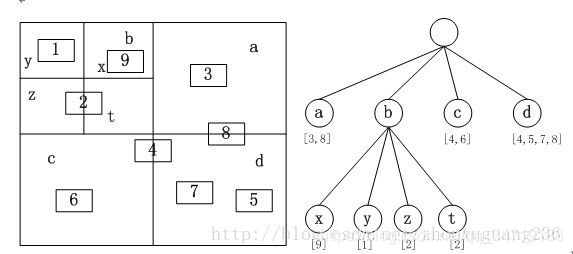
四叉树索引的基本思想是将地理空间递归划分为不同层次的树结构。它将已知范围的空间等分成四个相等的子空间,如此递归下去,直至树的层次达到一定深度或者满足某种要求后停止分割。
四叉树的结构比较简单,并且当空间数据对象分布比较均匀时,具有比较高的空间数据插入和查询效率,因此四叉树是GIS中常用的空间索引之一。
常规四叉树的结构如图所示,地理空间对象都存储在叶子节点上,中间节点以及根节点不存储地理空间对象。
四叉树的一些应用
参考博客:一个四叉树的简单实现
参考博客:四叉树Quadtrees在游戏领域应用
八叉树(Octree)
参考博客:八叉树(Octree)
参考博客:八叉树
参考博客:八叉树及K-D树的应用和实现
参考博客:图像量化法——八叉树算法
kd 树(Kd-Tree)
参考博客:Kd-Tree算法原理简析
参考博客:KDTree
参考博客:KD tree
参考博客:详解 KDTree
红黑树(Red-Black-Tree)
参考博客:红黑树(一)之 原理和算法详细介绍
参考博客:红黑树(二)之 C语言的实现
参考博客:红黑树(三)之 Linux内核中红黑树的经典实现
参考博客:红黑树(四)之 C++的实现
参考博客:红黑树(六)之 参考资料
哈夫曼树(Huffman-Tree)
定义
具有最小带权路径长度的二叉树称为哈夫曼树。
参考博客:哈夫曼树
参考博客:哈夫曼树与哈夫曼编码
参考博客:哈夫曼树
参考博客:哈夫曼树