STM32 遥控、避障车制作记录2——电机驱动
做小车第一步就是要编写电机驱动的程序,所有外围的检测、遥控等都是在电机转动的情况下进行操作的。本次选用的电机驱动是:L9110S四路驱动 直流电机驱动板。
本驱动的使用方式为:
模块供电电压:2.5-12V
接通VCC,GND 模块电源指示灯亮
A1输入高电平,A2输入低电平,MOTORA电机正转;
A1输入低电平,A2输入高电平,MOTORA电机反转;
B1输入高电平,B2输入低电平,MOTORB电机正转;
B1输入低电平,B2输入高电平,MOTORB电机反转;
C1输入高电平,C2输入低电平,MOTORC电机正转;
C1输入低电平,C2输入高电平,MOTORC电机反转;
D1输入高电平,D2输入低电平,MOTORD电机正转;
D1输入低电平,D2输入高电平,MOTORD电机反转;
由于要控制电机的转速,选用可以PWM输出的IO口。
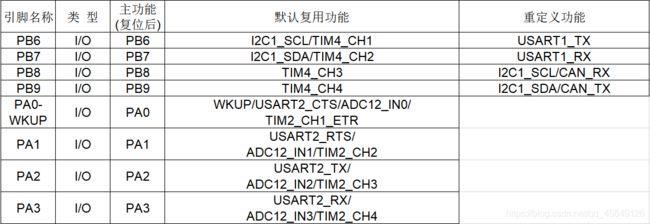
电机的接线:
左侧前轮:PB6\PB7
左侧后轮:PB8\PB9
右侧前轮:PA0\PA1
右侧后轮:PA2\PA3
下面开始IO口的初始化:
pwm.c程序:
void TIM2_PWM_Init(u32 arr,u32 psc)
{
GPIO_InitTypeDef GPIO_InitStructure;
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_OCInitTypeDef TIM_OCInitStructure;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE); //使能定时器1时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA | RCC_APB2Periph_AFIO, ENABLE);
//GPIO_PinRemapConfig(GPIO_Remap_TIM4, ENABLE); //Timer1部分重映射 TIM1_CH1->PA8 不需要 如果添加会不能使用pwm
//设置该引脚为复用输出功能
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0|GPIO_Pin_1|GPIO_Pin_2|GPIO_Pin_3;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);//初始化GPIO
//初始化TIM4
TIM_TimeBaseStructure.TIM_Period = arr; //设置在下一个更新事件装入活动的自动重装载寄存器周期的值
TIM_TimeBaseStructure.TIM_Prescaler =psc; //设置用来作为TIMx时钟频率除数的预分频值 频率为1k电机性能最好
TIM_TimeBaseStructure.TIM_ClockDivision = 0; //设置时钟分割:TDTS = Tck_tim
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //TIM向上计数模式
TIM_TimeBaseInit(TIM2, &TIM_TimeBaseStructure); //根据TIM_TimeBaseInitStruct中指定的参数初始化TIMx的时间基数单位
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1; //选择定时器模式:TIM脉冲宽度调制模式2
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //比较输出使能
TIM_OCInitStructure.TIM_Pulse=0;
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; //输出极性:TIM输出比较极性高
TIM_OC1Init(TIM2, &TIM_OCInitStructure); //根据T指定的参数初始化外设TI4 OC1
TIM_OC2Init(TIM2, &TIM_OCInitStructure); //根据T指定的参数初始化外设TI4 OC2
TIM_OC3Init(TIM2, &TIM_OCInitStructure); //根据T指定的参数初始化外设TI4 OC3
TIM_OC4Init(TIM2, &TIM_OCInitStructure); //根据T指定的参数初始化外设TI4 OC4
TIM_OC1PreloadConfig(TIM2, TIM_OCPreload_Enable); //使能TIM4在CCR1上的预装载寄存器
TIM_OC2PreloadConfig(TIM2, TIM_OCPreload_Enable); //使能TIM4在CCR2上的预装载寄存器
TIM_OC3PreloadConfig(TIM2, TIM_OCPreload_Enable); //使能TIM4在CCR3上的预装载寄存器
TIM_OC4PreloadConfig(TIM2, TIM_OCPreload_Enable); //使能TIM4在CCR4上的预装载寄存器
TIM_ARRPreloadConfig(TIM2, ENABLE); //使能TIM4 在 ARR 上的预装载寄存器
TIM_Cmd(TIM2, ENABLE); //使能TIM4
}
void TIM4_PWM_Init(u32 arr,u32 psc)
{
GPIO_InitTypeDef GPIO_InitStructure;
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_OCInitTypeDef TIM_OCInitStructure;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM4, ENABLE); //使能定时器1时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB | RCC_APB2Periph_AFIO, ENABLE); //使能GPIO外设和AFIO复用功能模块时钟
//GPIO_PinRemapConfig(GPIO_Remap_TIM4, ENABLE); //Timer1部分重映射 TIM1_CH1->PA8 不需要 如果添加会不能使用pwm
//设置该引脚为复用输出功能
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6|GPIO_Pin_7|GPIO_Pin_8|GPIO_Pin_9;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure);//初始化GPIO
//初始化TIM4
TIM_TimeBaseStructure.TIM_Period = arr; //设置在下一个更新事件装入活动的自动重装载寄存器周期的值
TIM_TimeBaseStructure.TIM_Prescaler =psc; //设置用来作为TIMx时钟频率除数的预分频值 频率为1k电机性能最好
TIM_TimeBaseStructure.TIM_ClockDivision = 0; //设置时钟分割:TDTS = Tck_tim
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //TIM向上计数模式
TIM_TimeBaseInit(TIM4, &TIM_TimeBaseStructure); //根据TIM_TimeBaseInitStruct中指定的参数初始化TIMx的时间基数单位
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1; //选择定时器模式:TIM脉冲宽度调制模式2
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //比较输出使能
TIM_OCInitStructure.TIM_Pulse=0;
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; //输出极性:TIM输出比较极性高
TIM_OC1Init(TIM4, &TIM_OCInitStructure); //根据T指定的参数初始化外设TI4 OC1
TIM_OC2Init(TIM4, &TIM_OCInitStructure); //根据T指定的参数初始化外设TI4 OC2
TIM_OC3Init(TIM4, &TIM_OCInitStructure); //根据T指定的参数初始化外设TI4 OC3
TIM_OC4Init(TIM4, &TIM_OCInitStructure); //根据T指定的参数初始化外设TI4 OC4
TIM_OC1PreloadConfig(TIM4, TIM_OCPreload_Enable); //使能TIM4在CCR1上的预装载寄存器
TIM_OC2PreloadConfig(TIM4, TIM_OCPreload_Enable); //使能TIM4在CCR2上的预装载寄存器
TIM_OC3PreloadConfig(TIM4, TIM_OCPreload_Enable); //使能TIM4在CCR3上的预装载寄存器
TIM_OC4PreloadConfig(TIM4, TIM_OCPreload_Enable); //使能TIM4在CCR4上的预装载寄存器
TIM_ARRPreloadConfig(TIM4, ENABLE); //使能TIM4 在 ARR 上的预装载寄存器
TIM_Cmd(TIM4, ENABLE); //使能TIM4
}
初始化IO口以后要写电机转动的程序:
控制电机的转速使用TIM_SetCompare1( )函数。
首先写出每个电机正转,反转,停止,然后把四个电机混合在一起使小车实现前后左右移动。
motor.c:
void Motor_Init(void)
{
GPIO_InitTypeDef GPIO_InitStruct;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE);
GPIO_InitStruct.GPIO_Mode=GPIO_Mode_Out_PP;
GPIO_InitStruct.GPIO_Pin=GPIO_Pin_0|GPIO_Pin_1|GPIO_Pin_2|GPIO_Pin_3;
GPIO_InitStruct.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_Init(GPIOA,&GPIO_InitStruct);
GPIO_ResetBits(GPIOA,GPIO_Pin_0|GPIO_Pin_1|GPIO_Pin_2|GPIO_Pin_3); //PA8、PA9、PA10、PA11输出低
GPIO_InitStruct.GPIO_Pin=GPIO_Pin_6|GPIO_Pin_7|GPIO_Pin_8|GPIO_Pin_9;
GPIO_Init(GPIOB,&GPIO_InitStruct);
GPIO_ResetBits(GPIOB,GPIO_Pin_6|GPIO_Pin_7|GPIO_Pin_8|GPIO_Pin_9); //PB6、PB7、PB8、PB9输出低
}
//左轮
//*******************************************
//左前轮
//左前轮-前进(速度=speed%)
void Motor_LF_forward(u8 speed)
{
TIM_SetCompare1(TIM4,0);
TIM_SetCompare2(TIM4,speed);
}
//左前轮-后退(速度=speed%)
void Motor_LF_backward(u8 speed)
{
TIM_SetCompare1(TIM4,speed);
TIM_SetCompare2(TIM4,0);
}
//左前轮-停止
void Motor_LF_stop()
{
TIM_SetCompare1(TIM4,0);
TIM_SetCompare2(TIM4,0);
}
//*******************************************
//左后轮
//左后轮-前进(速度=speed%)
void Motor_LB_forward(u8 speed)
{
TIM_SetCompare3(TIM4,0);
TIM_SetCompare4(TIM4,speed);
}
//左后轮-后退(速度=speed%)
void Motor_LB_backward(u8 speed)
{
TIM_SetCompare3(TIM4,speed);
TIM_SetCompare4(TIM4,0);
}
//左后轮-停止
void Motor_LB_stop()
{
TIM_SetCompare3(TIM4,0);
TIM_SetCompare4(TIM4,0);
}
//右轮
//*******************************************
//右前轮
//右前轮-前进(速度=speed%)
void Motor_RF_forward(u8 speed)
{
TIM_SetCompare1(TIM2,0);
TIM_SetCompare2(TIM2,speed);
}
//右前轮-后退(速度=speed%)
void Motor_RF_backward(u8 speed)
{
TIM_SetCompare1(TIM2,speed);
TIM_SetCompare2(TIM2,0);
}
//右前轮-停止
void Motor_RF_stop()
{
TIM_SetCompare1(TIM2,0);
TIM_SetCompare2(TIM2,0);
}
//*******************************************
//右后轮
//右后轮-前进(速度=speed%)
void Motor_RB_forward(u8 speed)
{
TIM_SetCompare3(TIM2,0);
TIM_SetCompare4(TIM2,speed);
}
//右后轮-后退(速度=speed%)
void Motor_RB_backward(u8 speed)
{
TIM_SetCompare3(TIM2,speed);
TIM_SetCompare4(TIM2,0);
}
//右后轮-停止
void Motor_RB_stop()
{
TIM_SetCompare3(TIM2,0);
TIM_SetCompare4(TIM2,0);
}
//小车停止
void Car_stop(void)
{
Motor_LF_stop();
Motor_LB_stop();
Motor_RF_stop();
Motor_RB_stop();
}
//小车向前(速度=speed%)
void Car_forward(u8 speed)
{
Motor_LF_backward(speed+25);
Motor_LB_backward(speed+25);
Motor_RF_backward(speed);
Motor_RB_backward(speed);
}
//小车向后(速度=speed%)
void Car_backward(u8 speed)
{
Motor_LF_forward(speed);
Motor_LB_forward(speed);
Motor_RF_forward(speed);
Motor_RB_forward(speed);
}
//小车左转(速度=speed%)
void Car_turnL(u8 speed)
{
Motor_LF_forward(speed);
Motor_LB_forward(speed);
Motor_RF_backward(speed);
Motor_RB_backward(speed);
}
//小车右转(速度=speed%)
void Car_turnR(u8 speed)
{
Motor_LF_backward(speed);
Motor_LB_backward(speed);
Motor_RF_forward(speed);
Motor_RB_forward(speed);
}
电机转动程序写完以后要上电测试,电机转动情况。注意:要使驱动板和核心板共地。
main.c
int main(void)
{
delay_init();
Motor_Init();
TIM4_PWM_Init(100-1,720-1);//72M/720=100khz,100k/100=1khz
TIM3_Cap_Init(0xFFFF,72-1);
LED=0;
while(1)
{
Car_forward(20); //将电机转速设置为0-100
delay_ms(1000);
Car_turnL(20);
delay_ms(1000);
Car_turnR(20);
delay_ms(1000);
Car_backward(20);
delay_ms(1000);
}
}
测试效果欢迎观看视频:
小车测试效果