ROS机器人控制 —— 键盘方向控制
文章目录
- 1. 键盘控制C++实现(x、y、z、theta)
- 2. 键盘控制Python实现(x、y、z、theta)
- 代码1
- 代码2
- 3.键盘笛卡尔方向控制(x、y、z)
- 4. 总结
通常情况下,对于机械臂的笛卡尔系下的控制或者小车的控制,我们在测试的时候可以通过键盘来实现,以下给出博主在网上找到的源码,能避免重复造轮子,更快的达到键盘控制的目的。
值得注意的是,以下代码左右键均是小车控制的代码,左右方向控制的是theta,因此对于机械臂的笛卡尔系控制还需要进一步修改代码。
1. 键盘控制C++实现(x、y、z、theta)
说明: 在终端中按下键盘里的“W”、“S”、“D”、“A”以及“Shift”键进行机器人的控制1。
/*
* =====================================================================================
* COPYRIGHT NOTICE
* Copyright (c) 2013 HUST-Renesas Lab
* ALL rights reserved.
*//**
* @file keyboard.cpp
* @brief robot keyboard control
* @version 0.1
* @date 2013/5/23 15:22:40
* @author Hu Chunxu , [email protected]
*//* ==================================================================================
* @0.1 Hu Chunxu 2013/5/23 15:22:40 create orignal file
* =====================================================================================
*/
#include
#include
#include
#include
#include
#include
#include
#include
#include
#define KEYCODE_W 0x77
#define KEYCODE_A 0x61
#define KEYCODE_S 0x73
#define KEYCODE_D 0x64
/* 带有shift键 */
#define KEYCODE_A_CAP 0x41
#define KEYCODE_D_CAP 0x44
#define KEYCODE_S_CAP 0x53
#define KEYCODE_W_CAP 0x57
class SmartCarKeyboardTeleopNode
{
private:
double walk_vel_;
double run_vel_;
double yaw_rate_;
double yaw_rate_run_;
geometry_msgs::Twist cmdvel_;
ros::NodeHandle n_;
ros::Publisher pub_;
public:
SmartCarKeyboardTeleopNode()
{
pub_ = n_.advertise("cmd_vel", 1);
ros::NodeHandle n_private("~");
n_private.param("walk_vel", walk_vel_, 0.5);
n_private.param("run_vel", run_vel_, 1.0);
n_private.param("yaw_rate", yaw_rate_, 1.0);
n_private.param("yaw_rate_run", yaw_rate_run_, 1.5);
}
~SmartCarKeyboardTeleopNode() { }
void keyboardLoop();
void stopRobot()
{
cmdvel_.linear.x = 0.0;
cmdvel_.angular.z = 0.0;
pub_.publish(cmdvel_);
}
};
SmartCarKeyboardTeleopNode* tbk;
/**
* 文件描述符
* 内核(kernel)利用文件描述符(file descriptor)来访问文件。文件描述符是非负整数。
* 标准输入(standard input)的文件描述符是 0,标准输出(standard output)是 1,标准错误(standard error)是 2。
*/
int kfd = 0;
/**
* === struct termios ===
* tcflag_t c_iflag; 输入模式
* tcflag_t c_oflag; 输出模式
* tcflag_t c_cflag; 控制模式
* tcflag_t c_lflag; 本地模式
* cc_t c_cc[NCCS]; 控制字符
*/
struct termios cooked, raw;
bool done;
int main(int argc, char** argv)
{
ros::init(argc,argv,"tbk", ros::init_options::AnonymousName | ros::init_options::NoSigintHandler);
SmartCarKeyboardTeleopNode tbk;
/* 创建一个新的线程 */
boost::thread t = boost::thread(boost::bind(&SmartCarKeyboardTeleopNode::keyboardLoop, &tbk));
ros::spin();
t.interrupt();
t.join();
tbk.stopRobot();
/* 设置终端参数 */
tcsetattr(kfd, TCSANOW, &cooked);
return(0);
}
void SmartCarKeyboardTeleopNode::keyboardLoop()
{
char c;
double max_tv = walk_vel_;
double max_rv = yaw_rate_;
bool dirty = false;
int speed = 0;
int turn = 0;
/**
* 从终端中获取按键
* int tcgetattr(int fd, struct termios *termios_p);
*/
tcgetattr(kfd, &cooked);
memcpy(&raw, &cooked, sizeof(struct termios));
/**
* c_lflag : 本地模式标志,控制终端编辑功能
* ICANON: 使用标准输入模式
* ECHO: 显示输入字符
*/
raw.c_lflag &=~ (ICANON | ECHO);
/**
* c_cc[NCCS]:控制字符,用于保存终端驱动程序中的特殊字符,如输入结束符等
* VEOL: 附加的End-of-file字符
* VEOF: End-of-file字符
* */
raw.c_cc[VEOL] = 1;
raw.c_cc[VEOF] = 2;
tcsetattr(kfd, TCSANOW, &raw);
puts("Reading from keyboard");
puts("Use WASD keys to control the robot");
puts("Press Shift to move faster");
/* *
* struct pollfd {
int fd; 文件描述符
short events; 等待的事件
short revents; 实际发生了的事件
};
*/
struct pollfd ufd;
ufd.fd = kfd;
ufd.events = POLLIN;
for(;;)
{
boost::this_thread::interruption_point();
/* get the next event from the keyboard */
int num;
/**
* poll:把当前的文件指针挂到设备内部定义的等待队列中。
* unsigned int (*poll)(struct file * fp, struct poll_table_struct * table)
*/
if ((num = poll(&ufd, 1, 250)) < 0)
{
/**
* perror( ) 用来将上一个函数发生错误的原因输出到标准设备(stderr)。
* 参数s所指的字符串会先打印出,后面再加上错误原因字符串。
* 此错误原因依照全局变量errno 的值来决定要输出的字符串。
* */
perror("poll():");
return;
}
else if(num > 0)
{
if(read(kfd, &c, 1) < 0)
{
perror("read():");
return;
}
}
else
{
/* 每按下一次动一下 */
if (dirty == true)
{
stopRobot();
dirty = false;
}
continue;
}
switch(c)
{
case KEYCODE_W:
max_tv = walk_vel_;
speed = 1;
turn = 0;
dirty = true;
break;
case KEYCODE_S:
max_tv = walk_vel_;
speed = -1;
turn = 0;
dirty = true;
break;
case KEYCODE_A:
max_rv = yaw_rate_;
speed = 0;
turn = 1;
dirty = true;
break;
case KEYCODE_D:
max_rv = yaw_rate_;
speed = 0;
turn = -1;
dirty = true;
break;
case KEYCODE_W_CAP:
max_tv = run_vel_;
speed = 1;
turn = 0;
dirty = true;
break;
case KEYCODE_S_CAP:
max_tv = run_vel_;
speed = -1;
turn = 0;
dirty = true;
break;
case KEYCODE_A_CAP:
max_rv = yaw_rate_run_;
speed = 0;
turn = 1;
dirty = true;
break;
case KEYCODE_D_CAP:
max_rv = yaw_rate_run_;
speed = 0;
turn = -1;
dirty = true;
break;
default:
max_tv = walk_vel_;
max_rv = yaw_rate_;
speed = 0;
turn = 0;
dirty = false;
}
cmdvel_.linear.x = speed * max_tv;
cmdvel_.angular.z = turn * max_rv;
pub_.publish(cmdvel_);
}
}
2. 键盘控制Python实现(x、y、z、theta)
代码1
说明: 在终端中按下键盘里的“W”、“S”、“D”、“A”以及“Shift”键进行机器人的控制1。
#!/usr/bin/env python
# -*- coding: utf-8 -*
# =====================================================================================
# COPYRIGHT NOTICE
# Copyright (c) 2013 HUST-Renesas Lab
# ALL rights reserved.
#
# @file teleop
# @brief robot keyboard control
# @version 0.1
# @date 2013/5/23 15:34:40
# @author Hu Chunxu , [email protected]
# ==================================================================================
# @0.1 Hu Chunxu 2013/5/23 create orignal file
# =====================================================================================
import os
import sys
import tty, termios
import roslib; roslib.load_manifest('smartcar_teleop')
import rospy
from geometry_msgs.msg import Twist
from std_msgs.msg import String
# 全局变量
cmd = Twist()
pub = rospy.Publisher('cmd_vel', Twist)
def keyboardLoop():
#初始化
rospy.init_node('smartcar_teleop')
# Set rospy to exectute a shutdown function when exiting
rate = rospy.Rate(rospy.get_param('~hz', 1))
#速度变量
walk_vel_ = rospy.get_param('walk_vel', 0.5)
run_vel_ = rospy.get_param('run_vel', 1.0)
yaw_rate_ = rospy.get_param('yaw_rate', 1.0)
yaw_rate_run_ = rospy.get_param('yaw_rate_run', 1.5)
max_tv = walk_vel_
max_rv = yaw_rate_
#显示提示信息
print "Reading from keyboard"
print "Use WASD keys to control the robot"
print "Press Caps to move faster"
print "Press q to quit"
#读取按键循环
while not rospy.is_shutdown():
fd = sys.stdin.fileno()
old_settings = termios.tcgetattr(fd)
#不产生回显效果
old_settings[3] = old_settings[3] & ~termios.ICANON & ~termios.ECHO
try :
tty.setraw( fd )
ch = sys.stdin.read( 1 )
finally :
termios.tcsetattr(fd, termios.TCSADRAIN, old_settings)
if ch == 'w':
max_tv = walk_vel_
speed = 1
turn = 0
elif ch == 's':
max_tv = walk_vel_
speed = -1
turn = 0
elif ch == 'a':
max_rv = yaw_rate_
speed = 0
turn = 1
elif ch == 'd':
max_rv = yaw_rate_
speed = 0
turn = -1
elif ch == 'W':
max_tv = run_vel_
speed = 1
turn = 0
elif ch == 'S':
max_tv = run_vel_
speed = -1
turn = 0
elif ch == 'A':
max_rv = yaw_rate_run_
speed = 0
turn = 1
elif ch == 'D':
max_rv = yaw_rate_run_
speed = 0
turn = -1
elif ch == 'q':
exit()
else:
max_tv = walk_vel_
max_rv = yaw_rate_
speed = 0
turn = 0
#发送消息
cmd.linear.x = speed * max_tv;
cmd.angular.z = turn * max_rv;
pub.publish(cmd)
rate.sleep()
#停止机器人
stop_robot();
def stop_robot():
cmd.linear.x = 0.0
cmd.angular.z = 0.0
pub.publish(cmd)
if __name__ == '__main__':
try:
keyboardLoop()
except rospy.ROSInterruptException:
pass
代码2
说明2:
For Holonomic mode (strafing), hold down the shift key:
U ---------- I ---------- O
J ---------- K ---------- L
M ---------- < ---------- >
t : up (+z)
b : down (-z)
其他按键 : stop
q/z : 最大速度增加/减少10%
w/x : 仅线性速度增加/减少10%
e/c : 只增加/减少角速度10%
CTRL-C 退出
#!/usr/bin/env python
# -*- coding: utf-8 -*
from __future__ import print_function
import roslib; roslib.load_manifest('teleop_twist_keyboard')
import rospy
from geometry_msgs.msg import Twist
import sys, select, termios, tty
msg = """
Reading from the keyboard and Publishing to Twist!
---------------------------
Moving around:
u i o
j k l
m , .
For Holonomic mode (strafing), hold down the shift key:
---------------------------
U I O
J K L
M < >
t : up (+z)
b : down (-z)
anything else : stop
q/z : increase/decrease max speeds by 10%
w/x : increase/decrease only linear speed by 10%
e/c : increase/decrease only angular speed by 10%
CTRL-C to quit
"""
moveBindings = {
'i':(1,0,0,0),
'o':(1,0,0,-1),
'j':(0,0,0,1),
'l':(0,0,0,-1),
'u':(1,0,0,1),
',':(-1,0,0,0),
'.':(-1,0,0,1),
'm':(-1,0,0,-1),
'O':(1,-1,0,0),
'I':(1,0,0,0),
'J':(0,1,0,0),
'L':(0,-1,0,0),
'U':(1,1,0,0),
'<':(-1,0,0,0),
'>':(-1,-1,0,0),
'M':(-1,1,0,0),
't':(0,0,1,0),
'b':(0,0,-1,0),
}
speedBindings={
'q':(1.1,1.1),
'z':(.9,.9),
'w':(1.1,1),
'x':(.9,1),
'e':(1,1.1),
'c':(1,.9),
}
def getKey():
tty.setraw(sys.stdin.fileno())
select.select([sys.stdin], [], [], 0)
key = sys.stdin.read(1)
termios.tcsetattr(sys.stdin, termios.TCSADRAIN, settings)
return key
def vels(speed,turn):
return "currently:\tspeed %s\tturn %s " % (speed,turn)
if __name__=="__main__":
settings = termios.tcgetattr(sys.stdin)
pub = rospy.Publisher('cmd_vel', Twist, queue_size = 1)
rospy.init_node('teleop_twist_keyboard')
speed = rospy.get_param("~speed", 0.5)
turn = rospy.get_param("~turn", 1.0)
x = 0
y = 0
z = 0
th = 0
status = 0
try:
print(msg)
print(vels(speed,turn))
while(1):
key = getKey()
if key in moveBindings.keys():
x = moveBindings[key][0]
y = moveBindings[key][1]
z = moveBindings[key][2]
th = moveBindings[key][3]
elif key in speedBindings.keys():
speed = speed * speedBindings[key][0]
turn = turn * speedBindings[key][1]
print(vels(speed,turn))
if (status == 14):
print(msg)
status = (status + 1) % 15
else:
x = 0
y = 0
z = 0
th = 0
if (key == '\x03'):
break
twist = Twist()
twist.linear.x = x*speed; twist.linear.y = y*speed; twist.linear.z = z*speed;
twist.angular.x = 0; twist.angular.y = 0; twist.angular.z = th*turn
pub.publish(twist)
except Exception as e:
print(e)
finally:
twist = Twist()
twist.linear.x = 0; twist.linear.y = 0; twist.linear.z = 0
twist.angular.x = 0; twist.angular.y = 0; twist.angular.z = 0
pub.publish(twist)
termios.tcsetattr(sys.stdin, termios.TCSADRAIN, settings)
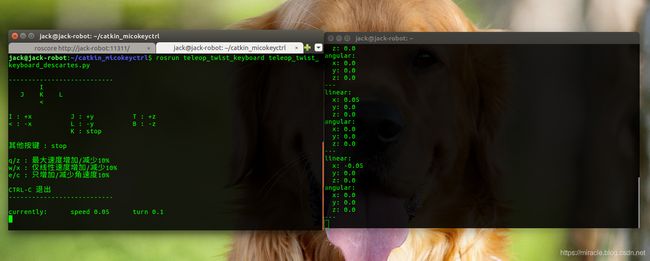
3.键盘笛卡尔方向控制(x、y、z)
基于2中的代码2来实现
#!/usr/bin/env python
# -*- coding: utf-8 -*
from __future__ import print_function
import roslib; roslib.load_manifest('teleop_twist_keyboard')
import rospy
from geometry_msgs.msg import Twist
import sys, select, termios, tty
msg = """
---------------------------
I
J K L
<
I : +x J : +y T : +z
< : -x L : -y B : -z
K : stop
其他按键 : stop
q/z : 最大速度增加/减少10%
w/x : 仅线性速度增加/减少10%
e/c : 只增加/减少角速度10%
CTRL-C 退出
---------------------------
"""
moveBindings = {
'i':(1,0,0,0),
'j':(0,1,0,0),
'l':(0,-1,0,0),
',':(-1,0,0,0),
'I':(1,0,0,0),
'J':(0,1,0,0),
'L':(0,-1,0,0),
'<':(-1,0,0,0),
't':(0,0,1,0),
'b':(0,0,-1,0),
'T':(0,0,1,0),
'B':(0,0,-1,0),
}
speedBindings={
'q':(1.1,1.1),
'z':(.9,.9),
'w':(1.1,1),
'x':(.9,1),
'e':(1,1.1),
'c':(1,.9),
}
def getKey():
tty.setraw(sys.stdin.fileno())
select.select([sys.stdin], [], [], 0)
key = sys.stdin.read(1)
termios.tcsetattr(sys.stdin, termios.TCSADRAIN, settings)
return key
def vels(speed,turn):
return "currently:\tspeed %s\tturn %s " % (speed,turn)
if __name__=="__main__":
settings = termios.tcgetattr(sys.stdin)
pub = rospy.Publisher('cmd_vel', Twist, queue_size = 1)
rospy.init_node('teleop_twist_keyboard')
speed = rospy.get_param("~speed", 0.05)
turn = rospy.get_param("~turn", 0.1)
x = 0
y = 0
z = 0
th = 0
status = 0
try:
print(msg)
print(vels(speed,turn))
while(1):
key = getKey()
if key in moveBindings.keys():
x = moveBindings[key][0]
y = moveBindings[key][1]
z = moveBindings[key][2]
th = moveBindings[key][3]
elif key in speedBindings.keys():
speed = speed * speedBindings[key][0]
turn = turn * speedBindings[key][1]
print(vels(speed,turn))
if (status == 14):
print(msg)
status = (status + 1) % 15
else:
x = 0
y = 0
z = 0
th = 0
if (key == '\x03'):
break
twist = Twist()
twist.linear.x = x*speed; twist.linear.y = y*speed; twist.linear.z = z*speed;
twist.angular.x = 0; twist.angular.y = 0; twist.angular.z = th*turn
pub.publish(twist)
except Exception as e:
print(e)
finally:
twist = Twist()
twist.linear.x = 0; twist.linear.y = 0; twist.linear.z = 0
twist.angular.x = 0; twist.angular.y = 0; twist.angular.z = 0
pub.publish(twist)
termios.tcsetattr(sys.stdin, termios.TCSADRAIN, settings)
4. 总结
-
在ROS下进行控制时,首先启动键盘控制节点,然后订阅相应的话题即可。
-
以3为例:
-
首先启动ROS Master:
roscore -
运行该节点:
rosrun teleop_twist_keyboard teleop_twist_keyboard_descartes.py

-
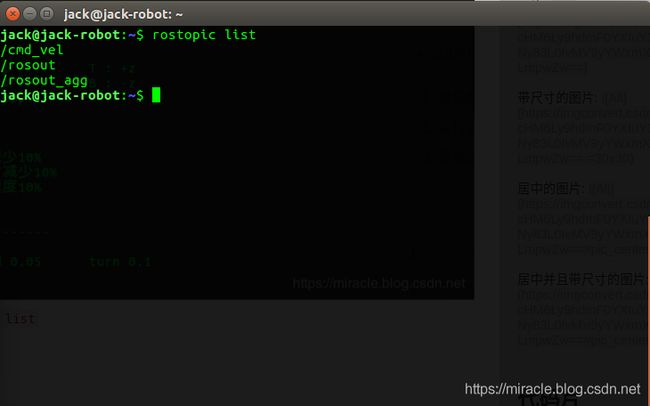
查看话题列表:
rostopic list
-
查看话题内容:
rostopic echo cmd_vel

-
查看
/cmd_vel话题的消息类型:rostopic type cmd_vel

-
订阅
/cmd_vel话题后根据消息文件接收数据即可
http://www.guyuehome.com/253 ↩︎ ↩︎
https://github.com/ncnynl/teleop_twist_keyboard ↩︎