贾志刚OpenCV3.2图像分割实战学习笔记
OpenCV图像分割资料分享:贾志刚的OpenCV图像分割实战视频教程全套资料(包含配套视频、配套PPT的PDF文件、源码和用到的图片素材等):点这里
目录:
实例1:读取单张JPG图像(测试环境)
实例2:KMeans对随机生成数据进行分类
实例3:KMeans图像分割
实例4:GMM(高斯混合模型)样本数据训练与预言
实例5:GMM(高斯混合模型)图像分割
实例6:基于距离变换的分水岭粘连对象分离与计数
实例7:基于分水岭图像分割
实例8:Grabcut原理与演示应用
实例9:K-Means-证件照背景替换
实例10:绿幕视频背景替换
实例1:读取单张JPG图像(测试环境)
#include
#include
using namespace cv;
int main(int argc, char** argv)
{
Mat src = imread("toux.jpg");//读取图像
if (src.empty())
{
printf("could not load image..\n");
return -1;
}
namedWindow("input image", CV_WINDOW_AUTOSIZE);//自动调整显示窗口大小
imshow("input image", src);//显示图像
waitKey(0);//等待
return 0;
} 
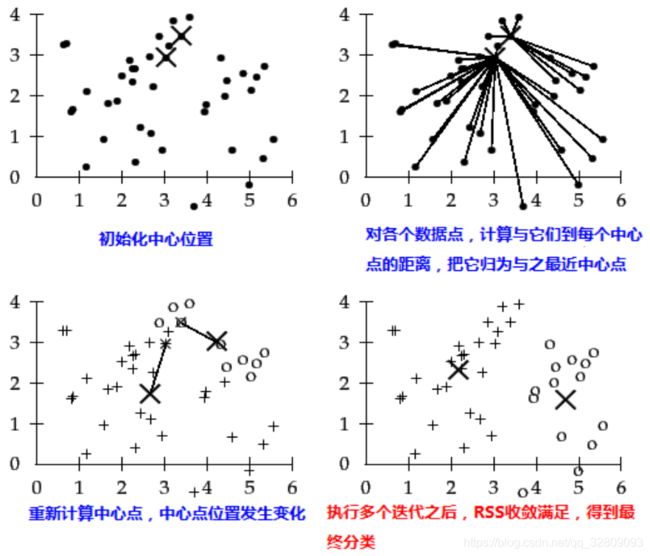
KMeans方法概述
1. 无监督学习方法(整个过程不需要人为干预)
2. 分类问题,输入分类数目,初始化中心位置
3. 硬分类方法,以距离度量(离那个中心点近就被划分为哪一类)
4. 迭代分类为聚类(不断迭代寻找最优中心点)
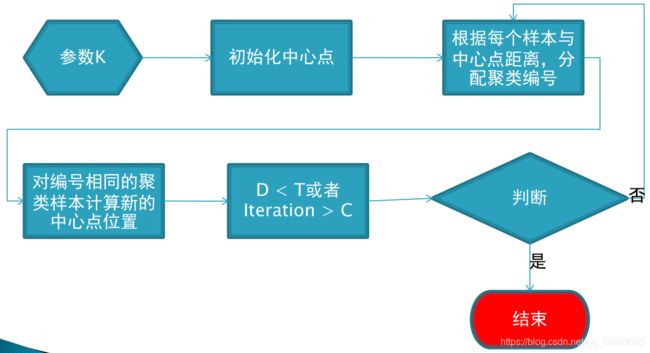
基本流程:
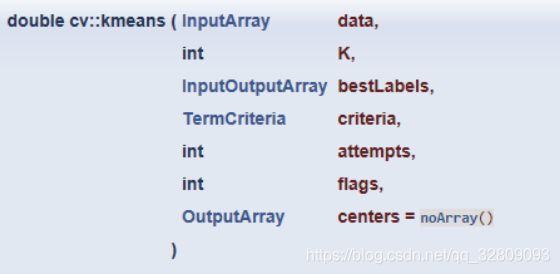
相关API:
实例2:KMeans对随机生成数据进行分类
#include
#include
using namespace cv;
using namespace std;
int main(int argc, char** argv) {
Mat img(500, 600, CV_8UC3);//定义一张图
RNG rng(12345);//定义随机数
//不同类定义为不同颜色
Scalar colorTab[] = {
Scalar(0, 0, 255),
Scalar(0, 255, 0),
Scalar(255, 0, 0),
Scalar(0, 255, 255),
Scalar(255, 0, 255)
};
int numCluster = rng.uniform(2, 5);//定义分类种类数量块
printf("number of clusters : %d\n", numCluster);
//设置从原图像中抽取多少个数据点
int sampleCount = rng.uniform(5, 1000);
Mat points(sampleCount, 1, CV_32FC2);
Mat labels;
Mat centers;
// 生成随机数
for (int k = 0; k < numCluster; k++) {
Point center;
center.x = rng.uniform(0, img.cols);
center.y = rng.uniform(0, img.rows);
//得到不同小块
Mat pointChunk = points.rowRange(k*sampleCount / numCluster,
k == numCluster - 1 ? sampleCount : (k + 1)*sampleCount / numCluster);
//用随机数对小块点进行填充
rng.fill(pointChunk, RNG::NORMAL, Scalar(center.x, center.y), Scalar(img.cols*0.05, img.rows*0.05));
}
randShuffle(points, 1, &rng);
// 使用KMeans
kmeans(points, numCluster, labels, TermCriteria(TermCriteria::EPS + TermCriteria::COUNT, 10, 0.1), 3, KMEANS_PP_CENTERS, centers);
// 用不同颜色显示分类
img = Scalar::all(255);
for (int i = 0; i < sampleCount; i++) {
int index = labels.at(i);
Point p = points.at(i);
circle(img, p, 2, colorTab[index], -1, 8);
}
// 每个聚类的中心来绘制圆
for (int i = 0; i < centers.rows; i++) {
int x = centers.at(i, 0);
int y = centers.at(i, 1);
printf("c.x= %d, c.y=%d", x, y);
circle(img, Point(x, y), 40, colorTab[i], 1, LINE_AA);
}
imshow("KMeans-Data-Demo", img);
waitKey(0);
return 0;
} 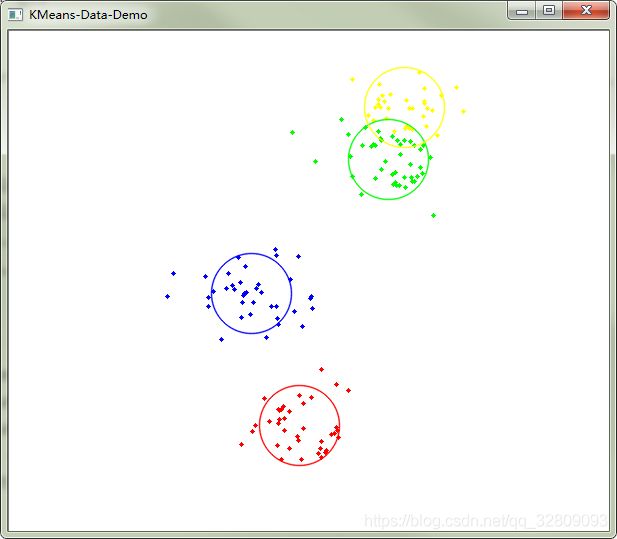
可见,随机生成的数据被分成了四块,每块的中心坐标如下:

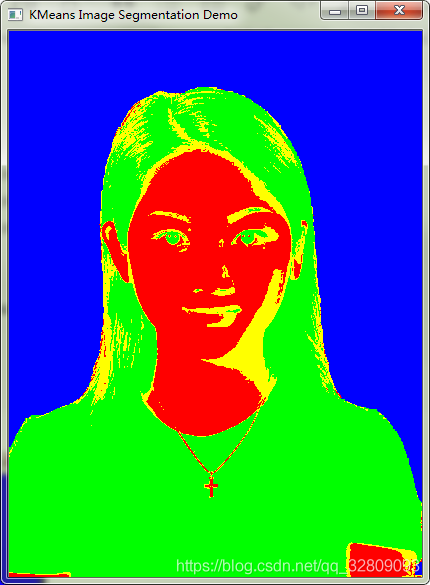
实例3:KMeans图像分割
#include
#include
using namespace cv;
using namespace std;
int main(int argc, char** argv) {
Mat src = imread("toux.jpg");
if (src.empty()) {
printf("could not load image...\n");
return -1;
}
namedWindow("input image", CV_WINDOW_AUTOSIZE);
imshow("input image", src);
Scalar colorTab[] = {
Scalar(0, 0, 255),
Scalar(0, 255, 0),
Scalar(255, 0, 0),
Scalar(0, 255, 255),
Scalar(255, 0, 255)
};
int width = src.cols;//图像的列
int height = src.rows;//图像的行
int dims = src.channels();//图像的通道数
// 初始化定义
int sampleCount = width*height;//获取图像的像素点数
int clusterCount = 4;//要分类块数
Mat points(sampleCount, dims, CV_32F, Scalar(10));//定义样本数据
Mat labels;
Mat centers(clusterCount, 1, points.type());//定义中心点(浮点数)
// RGB 数据转换到样本数据
int index = 0;
for (int row = 0; row < height; row++) {
for (int col = 0; col < width; col++) {
index = row*width + col;
Vec3b bgr = src.at(row, col);
points.at(index, 0) = static_cast(bgr[0]);//通道0
points.at(index, 1) = static_cast(bgr[1]);//通道1
points.at(index, 2) = static_cast(bgr[2]);//通道2
}
}
// 运行K-Means
TermCriteria criteria = TermCriteria(TermCriteria::EPS + TermCriteria::COUNT, 10, 0.1);
kmeans(points, clusterCount, labels, criteria, 3, KMEANS_PP_CENTERS, centers);//尝试3次
// 显示图像分割结果
Mat result = Mat::zeros(src.size(), src.type());
for (int row = 0; row < height; row++) {
for (int col = 0; col < width; col++) {
index = row*width + col;
int label = labels.at(index, 0);
result.at(row, col)[0] = colorTab[label][0];
result.at(row, col)[1] = colorTab[label][1];
result.at(row, col)[2] = colorTab[label][2];
}
}
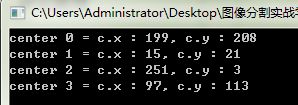
for (int i = 0; i < centers.rows; i++) {
int x = centers.at(i, 0);
int y = centers.at(i, 1);
printf("center %d = c.x : %d, c.y : %d\n", i, x, y);
}
imshow("KMeans Image Segmentation Demo", result);
waitKey(0);
return 0;
} 注:中心点是相对于图像RGB像素值而求定的位置。

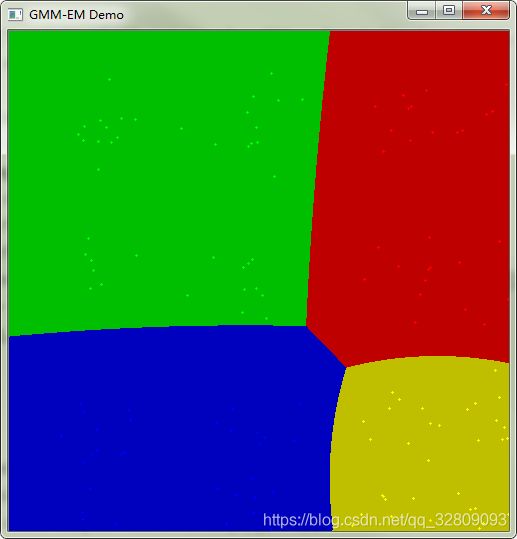
实例4:GMM(高斯混合模型)样本数据训练与预言
#include
#include
using namespace cv;
using namespace cv::ml;
using namespace std;
int main(int argc, char** argv) {
Mat img = Mat::zeros(500, 500, CV_8UC3);
RNG rng(12345);
Scalar colorTab[] = {
Scalar(0, 0, 255),
Scalar(0, 255, 0),
Scalar(255, 0, 0),
Scalar(0, 255, 255),
Scalar(255, 0, 255)
};
int numCluster = rng.uniform(2, 5);
printf("number of clusters : %d\n", numCluster);
int sampleCount = rng.uniform(5, 1000);
Mat points(sampleCount, 2, CV_32FC1);
Mat labels;
// 生成随机数
for (int k = 0; k < numCluster; k++) {
Point center;
center.x = rng.uniform(0, img.cols);
center.y = rng.uniform(0, img.rows);
Mat pointChunk = points.rowRange(k*sampleCount / numCluster,
k == numCluster - 1 ? sampleCount : (k + 1)*sampleCount / numCluster);
rng.fill(pointChunk, RNG::NORMAL, Scalar(center.x, center.y), Scalar(img.cols*0.05, img.rows*0.05));
}
randShuffle(points, 1, &rng);
Ptr em_model = EM::create();
em_model->setClustersNumber(numCluster);
em_model->setCovarianceMatrixType(EM::COV_MAT_SPHERICAL);//协方差矩阵
//训练次数设置为100
em_model->setTermCriteria(TermCriteria(TermCriteria::EPS + TermCriteria::COUNT, 100, 0.1));
em_model->trainEM(points, noArray(), labels, noArray());
// classify every image pixels
Mat sample(1, 2, CV_32FC1);
for (int row = 0; row < img.rows; row++) {
for (int col = 0; col < img.cols; col++) {
sample.at(0) = (float)col;
sample.at(1) = (float)row;
int response = cvRound(em_model->predict2(sample, noArray())[1]);
Scalar c = colorTab[response];
circle(img, Point(col, row), 1, c*0.75, -1);
}
}
// draw the clusters
for (int i = 0; i < sampleCount; i++) {
Point p(cvRound(points.at(i, 0)), points.at(i, 1));
circle(img, p, 1, colorTab[labels.at(i)], -1);
}
imshow("GMM-EM Demo", img);
waitKey(0);
return 0;
} 
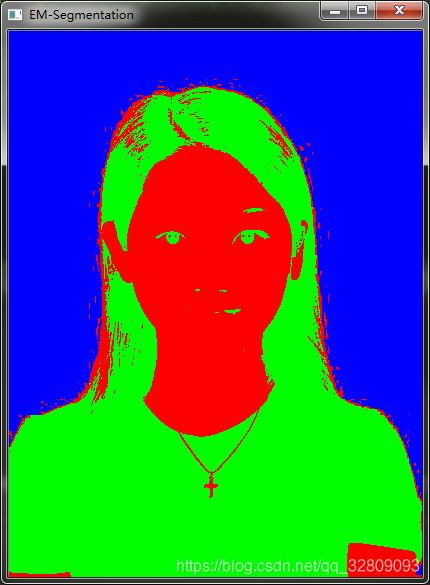
实例5:GMM(高斯混合模型)图像分割
#include
#include
using namespace cv;
using namespace cv::ml;
using namespace std;
int main(int argc, char** argv) {
Mat src = imread("toux.jpg");
if (src.empty()) {
printf("could not load iamge...\n");
return -1;
}
namedWindow("input image", CV_WINDOW_AUTOSIZE);
imshow("input image", src);
// 初始化
int numCluster = 3;
const Scalar colors[] = {
Scalar(255, 0, 0),
Scalar(0, 255, 0),
Scalar(0, 0, 255),
Scalar(255, 255, 0)
};
int width = src.cols;
int height = src.rows;
int dims = src.channels();
int nsamples = width*height;
Mat points(nsamples, dims, CV_64FC1);
Mat labels;
Mat result = Mat::zeros(src.size(), CV_8UC3);
// 图像RGB像素数据转换为样本数据
int index = 0;
for (int row = 0; row < height; row++) {
for (int col = 0; col < width; col++) {
index = row*width + col;
Vec3b rgb = src.at(row, col);
points.at(index, 0) = static_cast(rgb[0]);
points.at(index, 1) = static_cast(rgb[1]);
points.at(index, 2) = static_cast(rgb[2]);
}
}
// EM Cluster Train
Ptr em_model = EM::create();
em_model->setClustersNumber(numCluster);
em_model->setCovarianceMatrixType(EM::COV_MAT_SPHERICAL);//设置协方差矩阵
//设置停止条件,训练100次结束
em_model->setTermCriteria(TermCriteria(TermCriteria::EPS + TermCriteria::COUNT, 100, 0.1));
em_model->trainEM(points, noArray(), labels, noArray());
// 对每个像素标记颜色与显示
Mat sample(dims, 1, CV_64FC1);
double time = getTickCount();
int r = 0, g = 0, b = 0;
for (int row = 0; row < height; row++) {
for (int col = 0; col < width; col++) {
index = row*width + col;
int label = labels.at(index, 0);
Scalar c = colors[label];
result.at(row, col)[0] = c[0];
result.at(row, col)[1] = c[1];
result.at(row, col)[2] = c[2];
/*b = src.at(row, col)[0];
g = src.at(row, col)[1];
r = src.at(row, col)[2];
sample.at(0) = b;
sample.at(1) = g;
sample.at(2) = r;
int response = cvRound(em_model->predict2(sample, noArray())[1]);
Scalar c = colors[response];
result.at(row, col)[0] = c[0];
result.at(row, col)[1] = c[1];
result.at(row, col)[2] = c[2];*/
}
}
printf("execution time(ms) : %.2f\n", (getTickCount() - time)/getTickFrequency()*1000);
imshow("EM-Segmentation", result);
waitKey(0);
return 0;
} 
 执行时间:
执行时间:
可见,GMM算法处理时间较长,并不适合工程实时图像处理。
分水岭分割方法概述
图像形态学操作:
腐蚀与膨胀
开闭操作
分水岭分割方法原理:
- 基于浸泡理论的分水岭分割方法
- 基于连通图的方法
- 基于距离变换的方法
分水岭算法的运用:
分割粘连对象,实现形态学操作与对象计数
图像分割
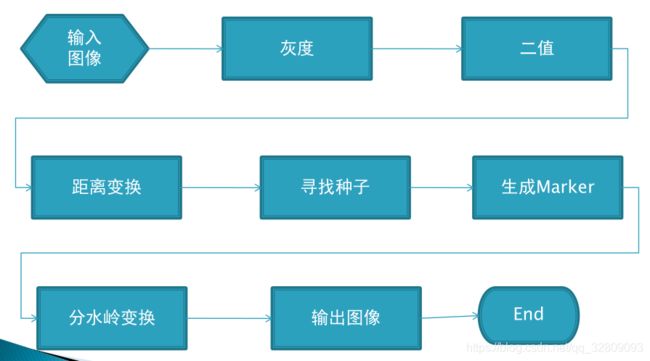
基于距离的分水岭分割流程:
API说明:
OpenCV3.x中
distanceTransform
watershed
实例6:基于距离变换的分水岭粘连对象分离与计数
#include
#include
using namespace cv;
using namespace std;
int main(int argc, char** argv) {
Mat src = imread("pill_002.png");//pill_002.png coins_001.jpg
if (src.empty()) {
printf("could not load image...\n");
return -1;
}
namedWindow("input image", CV_WINDOW_AUTOSIZE);
imshow("input image", src);
Mat gray, binary, shifted;
//边缘保留(空间、颜色差值<21、51) 减少差异化
pyrMeanShiftFiltering(src, shifted, 21, 51);
imshow("shifted", shifted);
cvtColor(shifted, gray, COLOR_BGR2GRAY);//转换为灰度图像
//灰度图像进行二值化
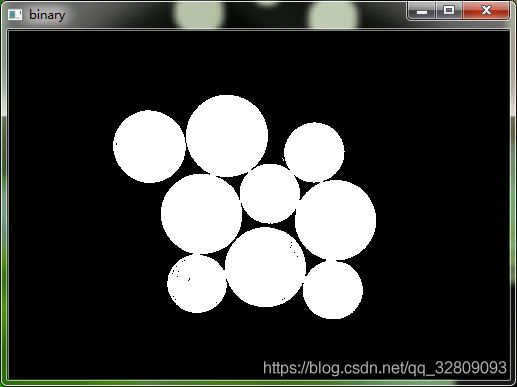
threshold(gray, binary, 0, 255, THRESH_BINARY | THRESH_OTSU);
imshow("binary", binary);
// distance transform 距离变化
Mat dist;
distanceTransform(binary, dist, DistanceTypes::DIST_L2, 3, CV_32F);//使用3*3进行
normalize(dist, dist, 0, 1, NORM_MINMAX);
imshow("distance result", dist);
// binary
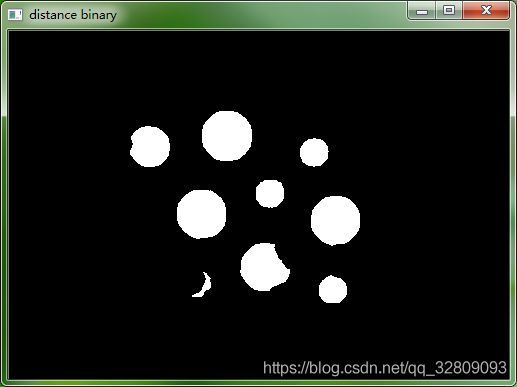
threshold(dist, dist, 0.4, 1, THRESH_BINARY);
imshow("distance binary", dist);
// markers 找到山峰的旗子
Mat dist_m;
dist.convertTo(dist_m, CV_8U);
vector> contours;
//寻找轮廓contours
findContours(dist_m, contours, RETR_EXTERNAL, CHAIN_APPROX_SIMPLE, Point(0, 0));
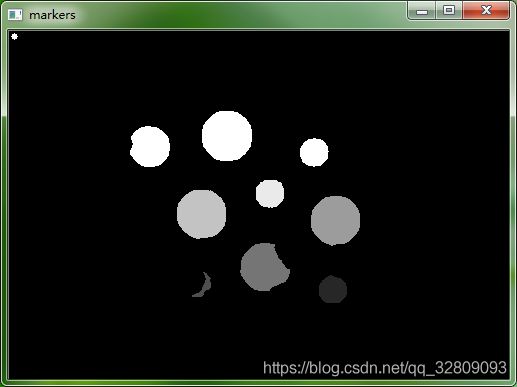
// create markers 填充轮廓
Mat markers = Mat::zeros(src.size(), CV_32SC1);
for (size_t t = 0; t < contours.size(); t++) {
drawContours(markers, contours, static_cast(t), Scalar::all(static_cast(t) + 1), -1);
}
//左上角显示一个圆(可有可无)
circle(markers, Point(5, 5), 3, Scalar(255), -1);
//markers放大10000倍进行显示
imshow("markers", markers*10000);
// 形态学操作 - 彩色图像也可以,目的是去掉干扰,让结果更好
Mat k = getStructuringElement(MORPH_RECT, Size(3, 3), Point(-1, -1));
morphologyEx(src, src, MORPH_ERODE, k);
// 完成分水岭变换
watershed(src, markers);
Mat mark = Mat::zeros(markers.size(), CV_8UC1);
markers.convertTo(mark, CV_8UC1);
bitwise_not(mark, mark, Mat());
//imshow("watershed result", mark);//中间是白色线进行分割
// generate random color 生成随机颜色
vector colors;
for (size_t i = 0; i < contours.size(); i++) {
int r = theRNG().uniform(0, 255);
int g = theRNG().uniform(0, 255);
int b = theRNG().uniform(0, 255);
colors.push_back(Vec3b((uchar)b, (uchar)g, (uchar)r));
}
// 颜色填充与最终显示
Mat dst = Mat::zeros(markers.size(), CV_8UC3);
int index = 0;
for (int row = 0; row < markers.rows; row++) {
for (int col = 0; col < markers.cols; col++) {
index = markers.at(row, col);
if (index > 0 && index <= contours.size()) {
dst.at(row, col) = colors[index - 1];
} else {
dst.at(row, col) = Vec3b(0, 0, 0);
}
}
}
imshow("Final Result", dst);
printf("number of objects : %d\n", contours.size());
waitKey(0);
return 0;
} 1 输入图像: 2 进行边缘保留的shifted转换:


3 灰度和二值化: 4 距离变换:

5 距离变换后进行二值化: 6 寻找种子,生产Marker:
7 分水岭变换并填充: 8 计数结果:

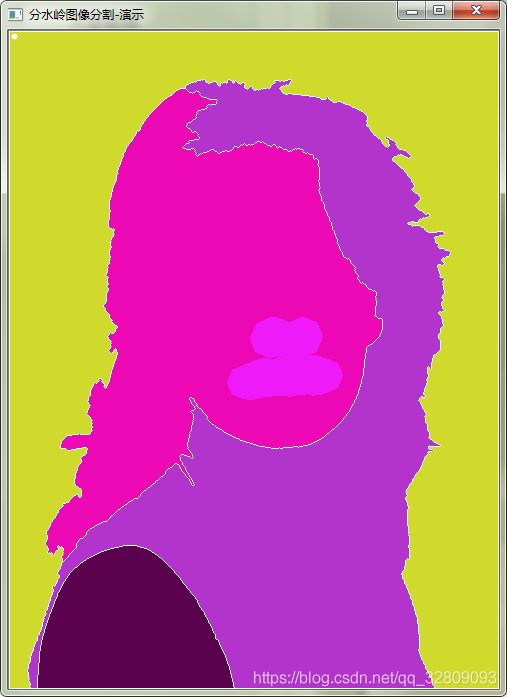
实例7:基于分水岭图像分割
#include
#include
using namespace cv;
using namespace std;
Mat watershedCluster(Mat &image, int &numSegments);
//参数分别为分割后图像,分割块数,输入原图
void createDisplaySegments(Mat &segments, int numSegments, Mat &image);
int main(int argc, char** argv) {
Mat src = imread("cvtest.png");
if (src.empty()) {
printf("could not load image...\n");
return -1;
}
namedWindow("input image", CV_WINDOW_AUTOSIZE);
imshow("input image", src);
int numSegments;
Mat markers = watershedCluster(src, numSegments);
createDisplaySegments(markers, numSegments, src);
waitKey(0);
return 0;
}
Mat watershedCluster(Mat &image, int &numComp) {
// 二值化
Mat gray, binary;
cvtColor(image, gray, COLOR_BGR2GRAY);
threshold(gray, binary, 0, 255, THRESH_BINARY | THRESH_OTSU);
// 形态学与距离变换
Mat k = getStructuringElement(MORPH_RECT, Size(3, 3), Point(-1, -1));
morphologyEx(binary, binary, MORPH_OPEN, k, Point(-1, -1));
Mat dist;
distanceTransform(binary, dist, DistanceTypes::DIST_L2, 3, CV_32F);
normalize(dist, dist, 0.0, 1.0, NORM_MINMAX);
// 开始生成标记
threshold(dist, dist, 0.1, 1.0, THRESH_BINARY);
normalize(dist, dist, 0, 255, NORM_MINMAX);
dist.convertTo(dist, CV_8UC1);
// 标记开始
vector> contours;
vector hireachy;
findContours(dist, contours, hireachy, RETR_CCOMP, CHAIN_APPROX_SIMPLE);
if (contours.empty()) {
return Mat();
}
Mat markers(dist.size(), CV_32S);
markers = Scalar::all(0);
for (int i = 0; i < contours.size(); i++) {
drawContours(markers, contours, i, Scalar(i + 1), -1, 8, hireachy, INT_MAX);
}
circle(markers, Point(5, 5), 3, Scalar(255), -1);
// 分水岭变换
watershed(image, markers);
numComp = contours.size();
return markers;
}
void createDisplaySegments(Mat &markers, int numSegments, Mat &image) {
// generate random color
vector colors;
for (size_t i = 0; i < numSegments; i++) {
int r = theRNG().uniform(0, 255);
int g = theRNG().uniform(0, 255);
int b = theRNG().uniform(0, 255);
colors.push_back(Vec3b((uchar)b, (uchar)g, (uchar)r));
}
// 颜色填充与最终显示
Mat dst = Mat::zeros(markers.size(), CV_8UC3);
int index = 0;
for (int row = 0; row < markers.rows; row++) {
for (int col = 0; col < markers.cols; col++) {
index = markers.at(row, col);
if (index > 0 && index <= numSegments) {
dst.at(row, col) = colors[index - 1];
}
else {
dst.at(row, col) = Vec3b(255, 255, 255);
}
}
}
imshow("分水岭图像分割-演示",dst);
return;
} 
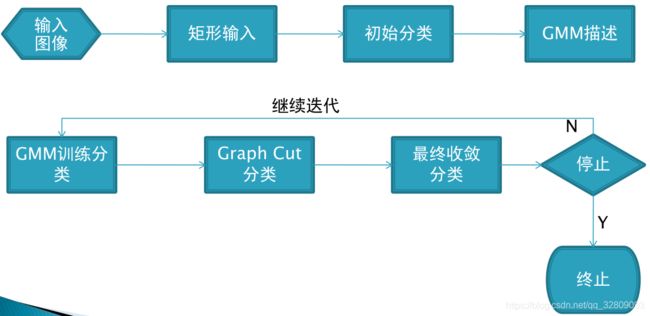
Grabcut算法的基本流程
API介绍:
- grabCut
- setMouseCallback
- onMouse(int event, int x, int y, int flags, void* param)
图像中对象抠图
实例8:Grabcut原理与演示应用
#include
#include
#include
using namespace cv;
using namespace std;
int numRun = 0;
Rect rect;
bool init = false;
Mat src, image;
Mat mask, bgModel, fgModel;//mask,背景,前景
const char* winTitle = "input image";
void onMouse(int event, int x, int y, int flags, void* param);
void setROIMask();
void showImage();
void runGrabCut();
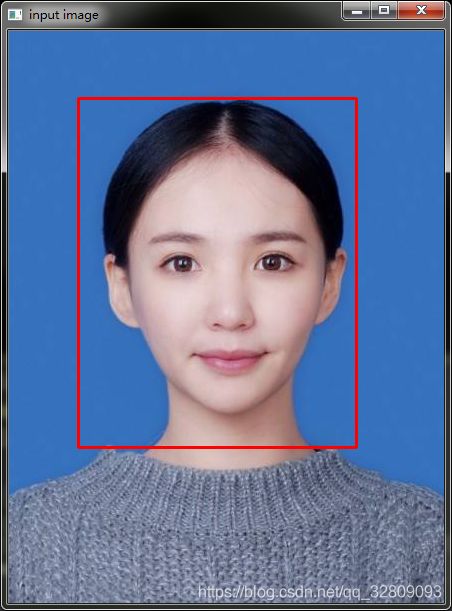
int main(int argc, char** argv) {
src = imread("tx.png", 1);
if (src.empty()) {
printf("could not load image...\n");
return -1;
}
mask.create(src.size(), CV_8UC1);
mask.setTo(Scalar::all(GC_BGD));
namedWindow(winTitle, CV_WINDOW_AUTOSIZE);//
setMouseCallback(winTitle, onMouse, 0);//设置鼠标反馈事件
imshow(winTitle, src);
while (true) {
char c = (char)waitKey(0);
if (c == 'n') {
runGrabCut();//运行GrabCut算法
numRun++;
showImage();
printf("current iteative times : %d\n", numRun);//当前迭代次数
}
if ((int)c == 27) {
break;
}
}
waitKey(0);
return 0;
}
void showImage() {
Mat result, binMask;
binMask.create(mask.size(), CV_8UC1);
binMask = mask & 1;
if (init) {
src.copyTo(result, binMask);
} else {
src.copyTo(result);//将src图像拷贝到result中
}
imwrite("tx2.png",result);
rectangle(result, rect, Scalar(0, 0, 255), 2, 8);//在result上绘制红色矩形框rect
imshow(winTitle, result);
}
void setROIMask() {
// GC_FGD = 1
// GC_BGD =0;
// GC_PR_FGD = 3
// GC_PR_BGD = 2
mask.setTo(GC_BGD);
rect.x = max(0, rect.x);
rect.y = max(0, rect.y);
rect.width = min(rect.width, src.cols - rect.x);
rect.height = min(rect.height, src.rows - rect.y);
mask(rect).setTo(Scalar(GC_PR_FGD));
}
//鼠标事件函数
void onMouse(int event, int x, int y, int flags, void* param) {
switch (event)
{
case EVENT_LBUTTONDOWN://鼠标左键按下
rect.x = x;//矩形左上角x,y坐标
rect.y = y;
rect.width = 1;//矩形线条宽度、高度
rect.height = 1;
init = false;
numRun = 0;
break;
case EVENT_MOUSEMOVE://鼠标移动
if (flags & EVENT_FLAG_LBUTTON) {
rect = Rect(Point(rect.x, rect.y), Point(x, y));
showImage();//显示带矩形框的图像
}
break;
case EVENT_LBUTTONUP://鼠标左键松开
if (rect.width > 1 && rect.height > 1) {
setROIMask();
showImage();
}
break;
default:
break;
}
}
//运行GrabCut函数
void runGrabCut() {
if (rect.width < 2 || rect.height < 2) {
return;
}
if (init) {
grabCut(src, mask, rect, bgModel, fgModel, 1);
} {
grabCut(src, mask, rect, bgModel, fgModel, 1, GC_INIT_WITH_RECT);
init = true;
}
} 鼠标选定方框后,按下键盘n键便可进行分割。


案例实战——证件照背景替换
关键知识点
K-Means
背景融合 – 高斯模糊
遮罩层生成
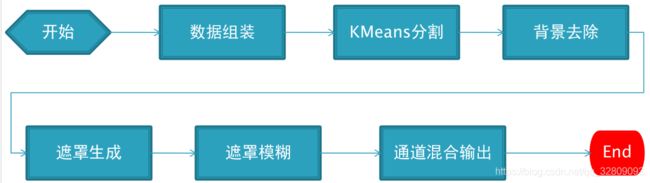
算法设计步骤
实例9:K-Means-证件照背景替换
#include
#include
using namespace cv;
using namespace std;
Mat mat_to_samples(Mat &image);
int main(int argc, char** argv) {
Mat src = imread("tx.png");
if (src.empty()) {
printf("could not load image...\n");
return -1;
}
namedWindow("输入图像", CV_WINDOW_AUTOSIZE);
imshow("输入图像", src);
// 组装数据
Mat points = mat_to_samples(src);
// 运行KMeans
int numCluster = 4;
Mat labels;
Mat centers;
TermCriteria criteria = TermCriteria(TermCriteria::EPS + TermCriteria::COUNT, 10, 0.1);
kmeans(points, numCluster, labels, criteria, 3, KMEANS_PP_CENTERS, centers);
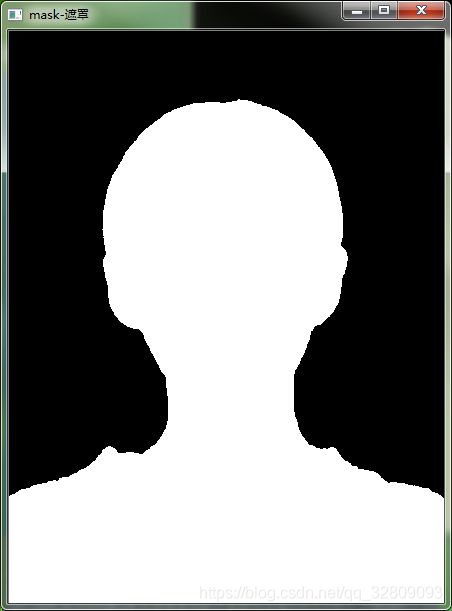
// 去背景+遮罩生成
Mat mask=Mat::zeros(src.size(), CV_8UC1);
int index = src.rows*2 + 2;
int cindex = labels.at(index, 0);
int height = src.rows;
int width = src.cols;
//Mat dst;
//src.copyTo(dst);
for (int row = 0; row < height; row++) {
for (int col = 0; col < width; col++) {
index = row*width + col;
int label = labels.at(index, 0);
if (label == cindex) { // 背景
//dst.at(row, col)[0] = 0;
//dst.at(row, col)[1] = 0;
//dst.at(row, col)[2] = 0;
mask.at(row, col) = 0;
} else {
mask.at(row, col) = 255;
}
}
}
imshow("mask-遮罩", mask);
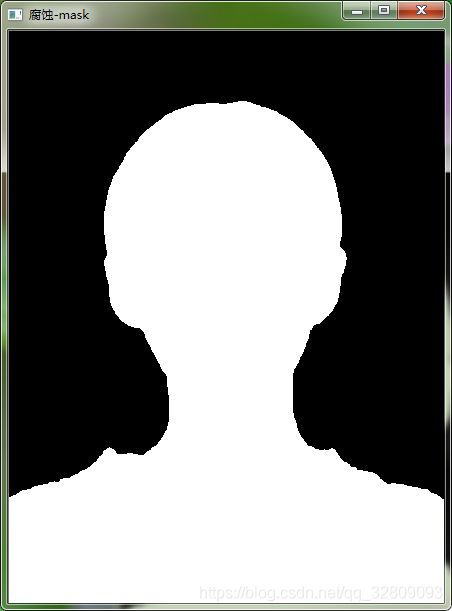
// 腐蚀 + 高斯模糊
Mat k = getStructuringElement(MORPH_RECT, Size(3, 3), Point(-1, -1));//用3*3像素进行腐蚀(减少3*3)
erode(mask, mask, k);
imshow("腐蚀-mask", mask);
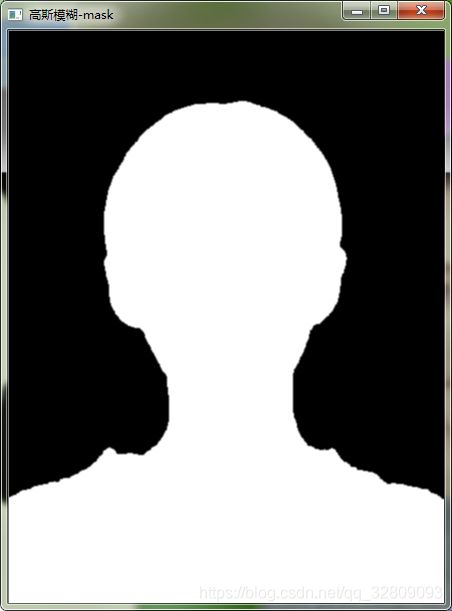
GaussianBlur(mask, mask, Size(3, 3), 0, 0);//用3*3像素进行高斯模糊(增加3*3) 所以边界不变
imshow("高斯模糊-mask", mask);
// 通道混合
RNG rng(12345);//随机数
Vec3b color;
color[0] = 217;//rng.uniform(0, 255);
color[1] = 60;// rng.uniform(0, 255);
color[2] = 160;// rng.uniform(0, 255);
Mat result(src.size(), src.type());
double w = 0.0;
int b = 0, g = 0, r = 0;
int b1 = 0, g1 = 0, r1 = 0;
int b2 = 0, g2 = 0, r2 = 0;
for (int row = 0; row < height; row++) {
for (int col = 0; col < width; col++) {
int m = mask.at(row, col);
if (m == 255) {
result.at(row, col) = src.at(row, col); // 前景
}
else if (m == 0) {
result.at(row, col) = color; // 背景
}
else {
w = m / 255.0;
b1 = src.at(row, col)[0];
g1 = src.at(row, col)[1];
r1 = src.at(row, col)[2];
b2 = color[0];
g2 = color[1];
r2 = color[2];
b = b1*w + b2*(1.0 - w);
g = g1*w + g2*(1.0 - w);
r = r1*w + r2*(1.0 - w);
result.at(row, col)[0] = b;
result.at(row, col)[1] = g;
result.at(row, col)[2] = r;
}
}
}
imshow("背景替换", result);
waitKey(0);
return 0;
}
Mat mat_to_samples(Mat &image) {
int w = image.cols;
int h = image.rows;
int samplecount = w*h;
int dims = image.channels();
Mat points(samplecount, dims, CV_32F, Scalar(10));
int index = 0;
for (int row = 0; row < h; row++) {
for (int col = 0; col < w; col++) {
index = row*w + col;
Vec3b bgr = image.at(row, col);
points.at(index, 0) = static_cast(bgr[0]);
points.at(index, 1) = static_cast(bgr[1]);
points.at(index, 2) = static_cast(bgr[2]);
}
}
return points;
} 


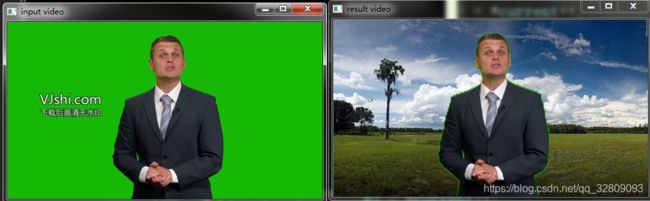
案例实战——绿幕视频背景替换
关键知识点
分割算法选择
背景融合 – 高斯模糊
遮罩层生成
算法选择
GMM或者Kmeans - ?? Bad idea, very slow!!!
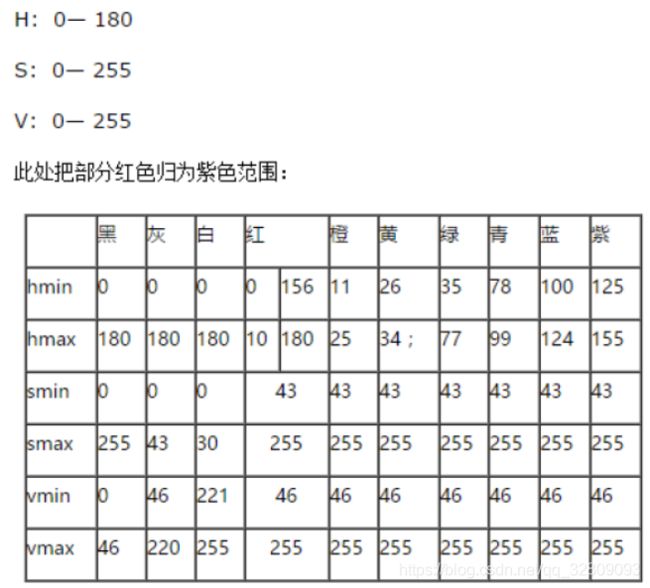
基于色彩的处理方法
RGB与HSV色彩空间
算法设计步骤
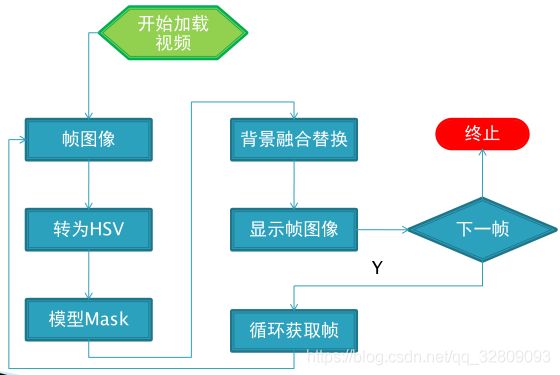
实例10:绿幕视频背景替换
如有资料等方面的问题,欢迎联系扣扣1837393417,共同探讨,共同进步!!!
#include
#include
using namespace cv;
using namespace std;
Mat replace_and_blend(Mat &frame, Mat &mask);
Mat background_01;//背景1
Mat background_02;//背景2
int main(int argc, char** argv) {
// start here...
background_01 = imread("bg_01.jpg");
background_02 = imread("bg_02.jpg");
VideoCapture capture;//视频抓取
capture.open("01.mp4");
if (!capture.isOpened()) {
printf("could not find the video file...\n");
return -1;
}
const char* title = "input video";
const char* resultWin = "result video";
namedWindow(title, CV_WINDOW_AUTOSIZE);
namedWindow(resultWin, CV_WINDOW_AUTOSIZE);
Mat frame, hsv, mask;
int count = 0;
//测试视频读取
//while (capture.read(frame)) {//判断读取视频单帧是否成功,读取单帧图像复制给frame对象
// imshow(title, frame);
// char c =waitKey(50);
// if (c == 27) {
// break;
// }
//}
///
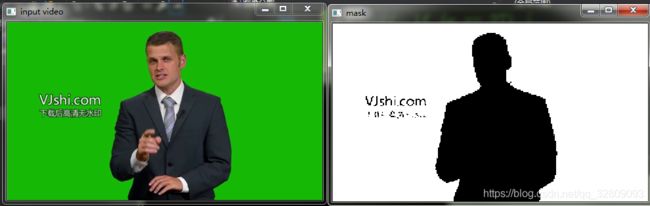
mask测试
//while (capture.read(frame)) {
// cvtColor(frame, hsv, COLOR_BGR2HSV);//转换为HSV
// //原背景选择HSV--绿色
// inRange(hsv, Scalar(35, 43, 46), Scalar(60, 255, 255), mask);//mask数据调整60
// imshow("mask",mask);//显示mask
// count++;
// imshow(title, frame);//显示输入video
// char c = waitKey(1);
// if (c == 27) {
// break;
// }
//}
/
while (capture.read(frame)) {//判断读取视频单帧是否成功,读取单帧图像复制给frame对象
cvtColor(frame, hsv, COLOR_BGR2HSV);//转换为HSV
inRange(hsv, Scalar(35, 43, 46), Scalar(60, 255, 255), mask);
// 形态学操作,3*3进行腐蚀,然后高斯进行3*3的模糊,边界不变
Mat k = getStructuringElement(MORPH_RECT, Size(3, 3), Point(-1, -1));
morphologyEx(mask, mask, MORPH_CLOSE, k);
erode(mask, mask, k);
GaussianBlur(mask, mask, Size(3, 3), 0, 0);
//背景替换和混合
Mat result = replace_and_blend(frame, mask);
char c = waitKey(1);
if (c == 27) {
break;
}
imshow(resultWin, result);//显示处理结果video
imshow(title, frame);//显示输入video
}
waitKey(0);
return 0;
}
//背景替换和混合
Mat replace_and_blend(Mat &frame, Mat &mask) {
Mat result = Mat::zeros(frame.size(), frame.type());
int h = frame.rows;
int w = frame.cols;
int dims = frame.channels();
// replace and blend
int m = 0;
double wt = 0;
int r = 0, g = 0, b = 0;
int r1 = 0, g1 = 0, b1 = 0;
int r2 = 0, g2 = 0, b2 = 0;
for (int row = 0; row < h; row++) {
uchar* current = frame.ptr(row);//当前
uchar* bgrow = background_01.ptr(row);//背景2
uchar* maskrow = mask.ptr(row);//面罩 行
uchar* targetrow = result.ptr(row);//目标 行
for (int col = 0; col < w; col++) {
m = *maskrow++;
if (m == 255) { // 赋值为背景
*targetrow++ = *bgrow++;
*targetrow++ = *bgrow++;
*targetrow++ = *bgrow++;
current += 3;
} else if(m==0) {// 赋值为前景
*targetrow++ = *current++;
*targetrow++ = *current++;
*targetrow++ = *current++;
bgrow += 3;
} else {
b1 = *bgrow++;
g1 = *bgrow++;
r1 = *bgrow++;
b2 = *current++;
g2 = *current++;
r2 = *current++;
// 权重
wt = m / 255.0;
// 混合
b = b1*wt + b2*(1.0 - wt);
g = g1*wt + g2*(1.0 - wt);
r = r1*wt + r2*(1.0 - wt);
*targetrow++ = b;
*targetrow++ = g;
*targetrow++ = r;
}
}
}
return result;
} 视频读取测试 视频播放

Mark测试
视频背景替换 视频背景替换播放