基于OpenCV实现的极值区域(Extremal Region)提取
一. 极值区域的定义
极值区域(Extremal Region, ER)是指区域外边界的像素值严格大于区域内像素值的区域。
二. 实现思路
- 取不同的阈值 θ ,把图像二值化;
- 求二值化图像中的连通区域,即为er区域。
三. 代码实现
- common.h
#ifndef COMMON_H
#define COMMON_H
#include - er.h
#ifndef ER_H
#define ER_H
#include "common.h"
const int dx[] = { 1, -1, 1, -1, 0, 1, 0, -1};
const int dy[] = { 1, -1, -1, 1, 1, 0, -1, 0};
class ER {
public:
ER();
double area;
// double perimeter;
Rect bounding_rect;
};
void detect_ers(Mat image, vector- er.cpp
#include "er.h"
ER::ER() {
area = 0;
// perimeter = 0;
}
bool is_border_point(int x, int y, Mat label_mat) {
int label = label_mat.at<int>(x, y);
for (int i = 0; i < 8; ++i) {
int tmp_x = x + dx[i];
int tmp_y = y + dy[i];
if (!(tmp_x >= 0 && tmp_x < label_mat.rows && tmp_y >= 0 && tmp_y < label_mat.cols)) return true;
int other_label = label_mat.at<int>(tmp_x, tmp_y);
if (label != other_label) return true;
}
return false;
}
void detect_ers_in_binary(Mat binary, vector- main.cpp
#include "er.h"
int main() {
string img_path = "E:\\ML\\TextRecognize\\data\\cold_paper_pic\\new_cold\\3.png";
Mat rgb_img = imread(img_path);
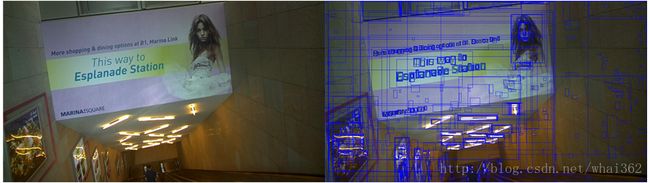
vector四. 效果