双轮差速模型的路径规划学习1-matlab模拟指定路径运动
本文为路径规划和matlab的学习随笔,主要参考matlab帮助文档里的“Path Following for a Differential Drive Robot”
操作环境:matlab2019b
使用模型:双轮差速小车模型
文章目录
- 一、双轮差速运动学模型简介
- 二、Matlab模拟指定路径运动
- 1. 设置地图与路径
- 2.配置双轮差速模型和控制器
- 3. 编写运动方程-沿已生成路径运动
- 4. 运行测试
一、双轮差速运动学模型简介
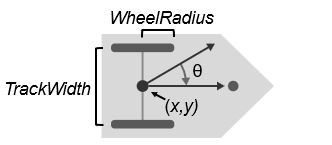
本文中的双轮差速模型是一种简化的车辆运动模型,主要模拟位置矢量q=[x y θ]T、运动速度矢量u=[v w]T(w为瞬时角速度、v为瞬时线速度),两个矢量的关系如下式。
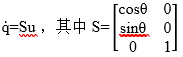
该模型的输入为运动速度矢量(线速度与角速度),输出为位置矢量。从而可以根据速度的变化得到小车模型下一时刻的位置。
matlab中的四个参数
- 车轮半径 wheelradius :车轮的半径将影响运动时的速度与位置关系,默认为0.05
- 车轮速度范围wheelspeedrange:线速度和角速度的范围,默认为负无穷到正无穷
- 轮距trackwidth:两轮之间的距离,默认为0.2
- 运动输入VehicleInputs:matlab中有两种
(1)“WheelSpeeds” 左右轮的速度
(2) "VehicleSpeedHeadingRate"线速度和角速度(本文使用该输入方式)
调用该模型代码为:differentialDriveKinematics
例如本文使用的:
robot = differentialDriveKinematics("TrackWidth", 1, "VehicleInputs", "VehicleSpeedHeadingRate");
这里只设置了轮距和运动输入方式,其余参数为默认值。
二、Matlab模拟指定路径运动
1. 设置地图与路径
首先设置地图,这里使用的是matlab自带的地图例子exampleMaps,选择其中的simplemap,并命名为SimpleMap,可通过show函数查看。
load exampleMaps
map = binaryOccupancyMap(simpleMap);
refFigure = figure('Name','SimpleMap');
show(map);
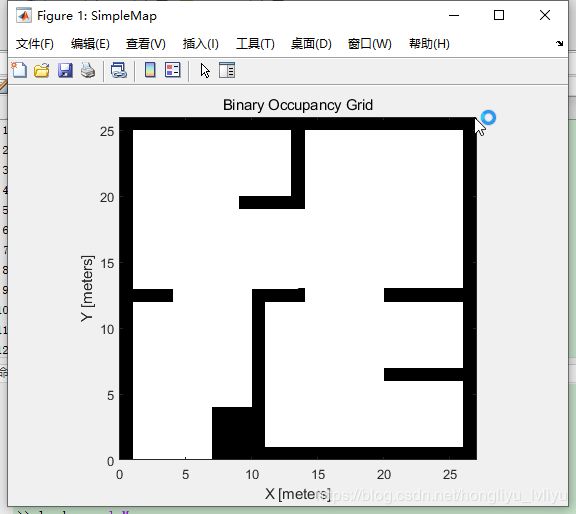
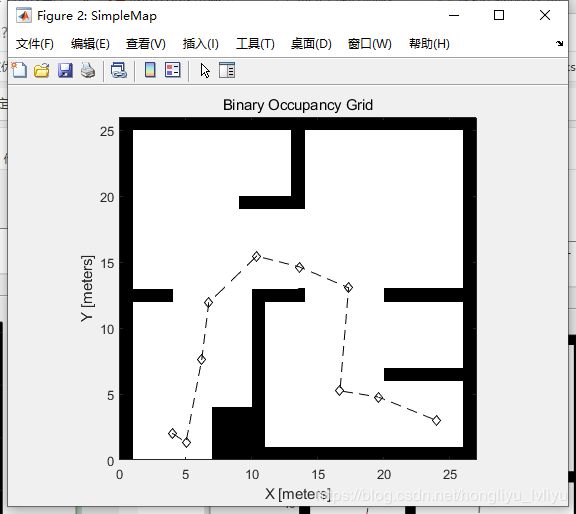
然后,设置指定的路径,该地图的长宽为27*26,可以将路径设置为一个个的坐标点,然后用直线相连,这里使用小编自己设置的path,大家可以根据情况自行设置路径,只要修改以下代码path中的坐标即可
path = [ 4.0000 2.0000
5.0119 1.3390
6.2018 7.6010
6.7355 11.9239
10.3720 15.4578
13.6292 14.6277
17.3369 13.0502
16.6829 5.2424
19.5966 4.7733
24.0000 3.0000];
figure(refFigure)
hold on
plot(path(:,1), path(:,2),'k--d') %作图
hold off
作图之后可以看见路径已经在图上标记出来了
2.配置双轮差速模型和控制器
将path中的第一个坐标点设置为小车模型的初始位置,最后一个坐标点设置为最终位置,初始的目标点设置为0;设置当前位置为初始位置与目标点之间。
然后用differentialDriveKinematics调用双轮差速小车模型
robotInitialLocation = path(1,:);
robotGoal = path(end,:);
initialOrientation = 0;
robotCurrentPose = [robotInitialLocation initialOrientation]';
robot = differentialDriveKinematics("TrackWidth", 1, "VehicleInputs", "VehicleSpeedHeadingRate");
接下来配置控制器和控制标准
这里使用controllerPurePursuit控制器,期望的线速度DesiredLinearVelocity=0.6,最大角速度为MaxAngularVelocity = 2;LookaheadDistance = 0.3(这个参数的意义小编一直没有弄懂…之后在更新吧~);
controller = controllerPurePursuit;
controller.Waypoints = path;
controller.DesiredLinearVelocity = 0.6;
controller.MaxAngularVelocity = 2;
controller.LookaheadDistance = 0.3;
设置控制标准,从起点到终点,到达终点的位置误差半径在0.5以内
goalRadius = 0.1;
distanceToGoal = norm(robotInitialLocation - robotGoal);
3. 编写运动方程-沿已生成路径运动
这里直接使用参考的帮助文档中的程序了,不过因为参考文档里的第一个例子没有结合地图,小编在图像显示部分做了一点点修改
% Initialize the simulation loop
sampleTime = 0.1;
vizRate = rateControl(1/sampleTime);
% Initialize the figure
figure
% Determine vehicle frame size to most closely represent vehicle with plotTransforms
frameSize = robot.TrackWidth/0.8;
while( distanceToGoal > goalRadius )
% Compute the controller outputs, i.e., the inputs to the robot
[v, omega] = controller(robotCurrentPose);
% Get the robot's velocity using controller inputs
vel = derivative(robot, robotCurrentPose, [v omega]);
% Update the current pose
robotCurrentPose = robotCurrentPose + vel*sampleTime;
% Re-compute the distance to the goal
distanceToGoal = norm(robotCurrentPose(1:2) - robotGoal(:));
% Update the plot %修改的地图显示部分
hold off
show(map);
hold all
% Plot path each instance so that it stays persistent while robot mesh
% moves
plot(path(:,1), path(:,2),"k--d") %修改的地图显示部分
% Plot the path of the robot as a set of transforms
plotTrVec = [robotCurrentPose(1:2); 0];
plotRot = axang2quat([0 0 1 robotCurrentPose(3)]);
plotTransforms(plotTrVec', plotRot, "MeshFilePath", "groundvehicle.stl", "Parent", gca, "View","2D", "FrameSize", frameSize);
light;
xlim([0 27])
ylim([0 26])
% xlim([0 13])
% ylim([0 13])
waitfor(vizRate);
end
4. 运行测试
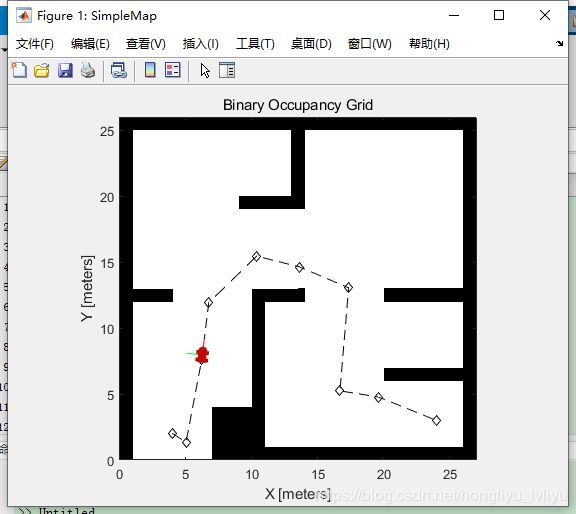
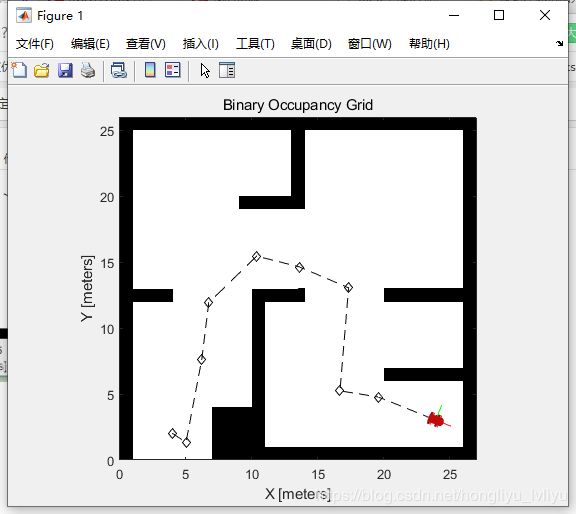
运行之后可以看到小车模型从起点沿着路径运行到了终点
本文代码可以在以下链接中下载https://download.csdn.net/download/hongliyu_lvliyu/12259424
代码说明:两个都是m脚本文件,先运行pathflowing生成路径,然后再运行Untitle控制小车运动
*本文主要参考matlab帮助文档里的“**Path Following for a Differential Drive Robot”*如有错误,还请大家指出~ !谢谢