python张正友相机标定
这里给出我觉得原理解释较清楚的地址,供大家参考:
https://blog.csdn.net/u010128736/article/details/52860364
这一篇为张正友标定原版论文的翻译版:
https://blog.csdn.net/heroacool/article/details/50286677?tdsourcetag=s_pctim_aiomsg
下面所写的原理均参考转载自这两篇文章,有问题请指正。
(一)基本原理
- 相机标定简单来说,是一个从世界坐标系→相机坐标系→成像平面坐标系→像素平面坐标系,也就是一个从三维点转换到三维点再到二维点的过程。进行摄像机标定的目的:求出相机的内、外参数,以及畸变参数。
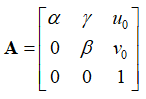
- 基本参数设定
s: 世界坐标系到图像坐标系的尺度因子
(u0,v0): 像主点坐标
α, β: 焦距与像素横纵比的融合
γ: 径向畸变参数
2D 图像点:m=[u,v,1]T
3D 空间点:X=[X,Y,Z,1]T
标定用的棋盘格平面到图像平面的单应性关系为:

其中[R,T]为外参,A为相机内参矩阵
- 不妨设棋盘格位于Z = 0,定义旋转矩阵R的第i列为 ri, 则有:
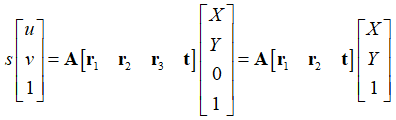
于是空间到图像的映射可改为:

其中H 是描述Homographic矩阵,可通过最小二乘,从角点世界坐标到图像坐标的关系求解。
令 H 为 H = [h1 h2 h3],

Homography 有 8 个自由度,通过上述等式的矩阵运算,根据正交和归一化的约束可以得到如下等式:
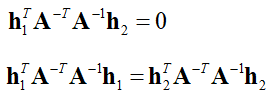
这个条件下,我们只能得到两个内参的约束条件。 - 外部参数可通过Homography求解,由 H = [h1 h2 h3] = λA[r1 r2 t],可推出

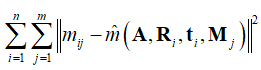
一般而言,求解出的R = [r1 r2 r3] 不会满足正交与归一的标准,在实际操作中,R 可以通过SVD分解实现规范化。给定 n 张棋盘格图像,每张图像有 m 个角点,最小化下述公式等同于极大似然估计:
- 张氏标定法只关注了影响最大的径向畸变。则数学表达式为:

其中,(u,v)是理想无畸变的像素坐标,(u,v)(u,v)是实际畸变后的像素坐标。(u0,v0)代表主点,(x,y)是理想无畸变的连续图像坐标,(x,y)(x,y)是实际畸变后的连续图像坐标。k1和k2为前两阶的畸变参数。 - 这里的原理只有部分,开头给出的原论文介绍得更详细清楚,这里就不多做介绍了避免误导大家。
- 实验操作步骤:
(1)打印一张棋盘格A4纸张(黑白间距已知),并贴在一个平板上
(2)针对棋盘格拍摄若干张图片(一般10-20张)
(3)在图片中检测特征点(Harris特征)
(4)利用解析解估算方法计算出5个内部参数,以及6个外部参数
(5)根据极大似然估计策略,设计优化目标并实现参数的refinement
(二)运行结果与分析
-
过程中可能出现的问题
(1)ValueError: could not broadcast input array from shape (54,2) into shape (49,2)
在运行过程中,我们所要采用计算的是棋盘格的内角点,而不包括外角点,若是出现这种错误可以检查看看自己函数中所代入的角点是否有误。
(2)error: ..\..\..\modules\core\src\array.cpp:2482: error: (-206) Unrecognized or unsupported array type in function cvGetMat
这个错误也只是个小错误,需要检查自己的图片路径是否有误。若是有出现cv2error,-215这样错误的,可能是opencv版本与代码不适用,可以尝试换个opencv版本。 -
测试图片:

-
运行结果
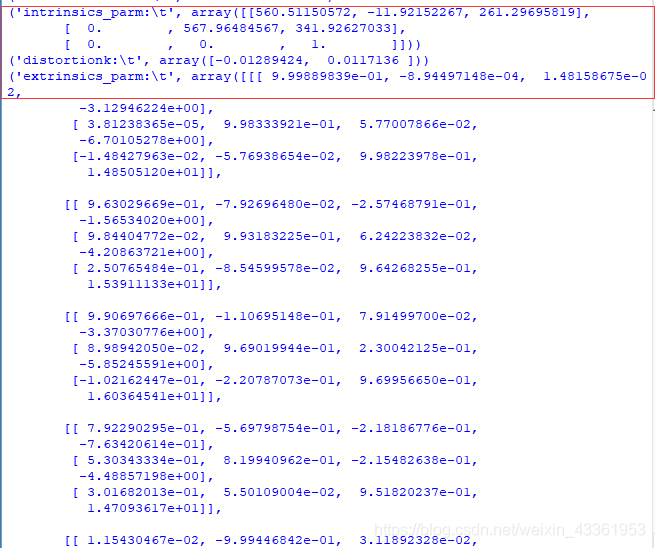
(1)我所使用的手机型号为OPPO r11,相机分辨率为3456×4608,焦距为4.27mm,拍摄使用的棋盘格单个方格尺寸为2.5cm×2.5cm,每行每列均有10个方格。
(2)intrinsics_parm为内参,一个相机只有一个内参,distortionk为畸变系数K,extrinsics_parm为外参数,接下来的数据则为每一张图片的参数,因为拍摄角度的不同所以每一张的外参也不相同,有17张图片就有17个外参。
(3)在这里,要注意的是所使用的图片要先转为灰度图再运行,因为原图所占空间较大怕影响处理速度,所以我使用的图像是经过比例压缩的,若是不经过比例压缩会导致图像变形,方格就没那么精确,结果也会有较大的偏差。
(三)代码
若是使用要做相应的修改,比如10×10的棋盘,则内角点为9×9。
#!usr/bin/env/ python
# _*_ coding:utf-8 _*_
import cv2 as cv
import numpy as np
import os
from step.homography import get_homography
from step.intrinsics import get_intrinsics_param
from step.extrinsics import get_extrinsics_param
from step.distortion import get_distortion
from step.refine_all import refinall_all_param
def calibrate():
#求单应矩阵
H = get_homography(pic_points, real_points_x_y)
#求内参
intrinsics_param = get_intrinsics_param(H)
#求对应每幅图外参
extrinsics_param = get_extrinsics_param(H, intrinsics_param)
#畸变矫正
k = get_distortion(intrinsics_param, extrinsics_param, pic_points, real_points_x_y)
#微调所有参数
[new_intrinsics_param, new_k, new_extrinsics_param] = refinall_all_param(intrinsics_param,
k, extrinsics_param, real_points, pic_points)
print("intrinsics_parm:\t", new_intrinsics_param)
print("distortionk:\t", new_k)
print("extrinsics_parm:\t", new_extrinsics_param)
if __name__ == "__main__":
file_dir = r'..\image6'
# 标定所用图像
pic_name = os.listdir(file_dir)
# 由于棋盘为二维平面,设定世界坐标系在棋盘上,一个单位代表一个棋盘宽度,产生世界坐标系三维坐标
cross_corners = [7, 7] #棋盘方块交界点排列
real_coor = np.zeros((cross_corners[0] * cross_corners[1], 3), np.float32)
real_coor[:, :2] = np.mgrid[0:7, 0:7].T.reshape(-1, 2)
real_points = []
real_points_x_y = []
pic_points = []
for pic in pic_name:
pic_path = os.path.join(file_dir, pic)
pic_data = cv.imread(pic_path)
# 寻找到棋盘角点
succ, pic_coor = cv.findChessboardCorners(pic_data, (cross_corners[0], cross_corners[1]), None)
if succ:
# 添加每幅图的对应3D-2D坐标
pic_coor = pic_coor.reshape(-1, 2)
pic_points.append(pic_coor)
real_points.append(real_coor)
real_points_x_y.append(real_coor[:, :2])
calibrate()
以上为主函数,代码原作者还写了一些子函数调用,具体参考 https://github.com/SPengLiang/Camera-Calibration-of-Zhang-s-method