Python计算机视觉编程学习笔记 五 多视图几何
多视图几何
- (一)外极几何
- 1.1 基础矩阵
- 1.2 一个简单的数据集
- 1.3 用 Matplotlib 绘制三维数据
- 1.4 外极点和外极线
- (二)照相机和三维结构的计算
- 2.1 三角剖分
- 2.2 由三维点计算照相机矩阵
- 2.3 由基础矩阵计算照相机矩阵
- (三)三维重建
- 3.1 稳健估计基础矩阵
- 3.2 三维重建
- (四)问题求助
(一)外极几何
如果有一个场景的两个视图以及视图中的对应图像点,那么根据照相机间的空间相对位置关系、照相机的性质以及三维场景点的位置,可以得到对这些图像点的一些几何关系约束。
外极几何是研究两幅图像之间存在的几何。它和场景结构无关,只依赖于摄像机的内外参数。研究这种几何可以用在图像匹配、三维重建方面。
介绍:

1.1 基础矩阵
1.基础矩阵概述:
1)两幅图像之间的约束关系使用代数的方式表示出来即为基本矩阵。
2)基础矩阵F满足:
3)基础矩阵可以用于简化匹配和去除错配特征
2.基础矩阵性质:
- 转置对称性:如果 F F F是一对影像 ( P , P ′ ) (P,P′) (P,P′)的基础矩阵( x ′ F x = 0 x′Fx=0 x′Fx=0),反过来 ( P ′ , P ) (P',P) (P′,P) 的基础矩阵是 F T FT FT。证明很简单,直接对 x ′ F x = 0 x′Fx=0 x′Fx=0两侧分别转置,得到 x T F T x ′ = 0 xTFTx′=0 xTFTx′=0。
- 对极线:对于左影像上任意一点 x x x,其在右影像上的对极线为 l ′ = F x l'=Fx l′=Fx 。
- 对极点:任何对极线都会经过核点,所以有对于左影像上任意一点 x x x , e ′ T l ′ = e ′ T ( F x ) = 0 e′Tl′=e′T(Fx)=0 e′Tl′=e′T(Fx)=0,于是有 e ′ T F = 0 e′TF=0 e′TF=0。同理有
F e = 0 Fe=0 Fe=0。 - F具有7自由度:一个33x33 的单应矩阵,具有88个自由度,而 FF 还满足 d e t F = 0 detF=0 detF=0,所以 F F F 具有7个自由度。
- F是相关的: F F F 将左影像上的一点 x x x 投影到右影像上一条对极线 l ′ l′ l′,投影本质上是将 x x x 与左极点的连线 l l l投影到右影像上的对极线 l ′ l' l′,所以右影像上的一条对极线 l ′ l' l′对应的是左影像上的一条对极线 l l l,这种点到线的投影不可逆。
2.八点算法估算基础矩阵F
(1) **原理:**任给两幅图像中的匹配点 x x x 与 x ’ x’ x’ ,令 x = ( u , v , 1 ) T x=(u,v,1)^T x=(u,v,1)T ,
基础矩阵F是一个3×3的秩为2的矩阵,一般记基础矩阵F为:

有相应方程:
![]() 由矩阵乘法可知有:
由矩阵乘法可知有:

(2)优点: 线性求解,容易实现,运行速度快 。
缺点:对噪声敏感。
归一算法步骤:
给定n≥8组对应点{ X i < − > X i ′ Xi<−>Xi′ Xi<−>Xi′},确定基本矩阵 F F F使得 x ′ T i F x i = 0 x'TiFxi=0 x′TiFxi=0。
- 归一化:根据 X i = T X i , X i = T ′ X ′ i Xi=TXi,Xi=T′X′i Xi=TXi,Xi=T′X′i,变换图像坐标。其中 T T T和 T ′ T′ T′是有平移和缩放组成的归一变化。
- 求解对应匹配的基本矩阵 F ′ F′ F′。
- 求线性解:用由对应点集{Xi<−>x′iXi<−>xi′}确定的系数矩阵AA的最小奇异值的奇异矢量确定 F F F
- 奇异性约束:用SVD对 F F F进行分解,令其最小奇异值为0,得到 F ′ F′ F′,使得 d e t F ′ = 0 detF′=0 detF′=0。
- 解除归一化: 令F=T’TF’T F=T′TF′T。矩阵FF就是数据xi<−>x′ixi<−>xi′对应的基本矩阵。
示例:
# -*- coding: utf-8 -*-
from PIL import Image
from numpy import *
from pylab import *
import numpy as np
from PCV.geometry import camera
from PCV.geometry import homography
from PCV.geometry import sfm
from PCV.localdescriptors import sift
# -*- coding: utf-8 -*-
载入图像,并计算特征, 匹配特征:
im1 = array(Image.open('E:\\test\\2.jpg'))
sift.process_image('E:\\test\\2.jpg', 'E:\\test\\im1.sift')
l1, d1 = sift.read_features_from_file('E:\\test\\im1.sift')
im2 = array(Image.open('E:\\test\\3.jpg'))
sift.process_image('E:\\test\\3.jpg', 'E:\\test\\im2.sift')
l2, d2 = sift.read_features_from_file('E:\\test\\im2.sift')
matches = sift.match_twosided(d1, d2)
ndx = matches.nonzero()[0]
使用齐次坐标表示,并使用 inv(K) 归一化:
x1 = homography.make_homog(l1[ndx, :2].T)
ndx2 = [int(matches[i]) for i in ndx]
x2 = homography.make_homog(l2[ndx2, :2].T)
x1n = x1.copy()
x2n = x2.copy()
print(len(ndx))
figure(figsize=(16,16))
sift.plot_matches(im1, im2, l1, l2, matches, True)
show()
# Don't use K1, and K2
#def F_from_ransac(x1, x2, model, maxiter=5000, match_threshold=1e-6):
def F_from_ransac(x1, x2, model, maxiter=5000, match_threshold=1e-6):
""" Robust estimation of a fundamental matrix F from point
correspondences using RANSAC (ransac.py from
http://www.scipy.org/Cookbook/RANSAC).
input: x1, x2 (3*n arrays) points in hom. coordinates. """
from PCV.tools import ransac
data = np.vstack((x1, x2))
d = 20 # 20 is the original
# compute F and return with inlier index
F, ransac_data = ransac.ransac(data.T, model,
8, maxiter, match_threshold, d, return_all=True)
return F, ransac_data['inliers']
使用 RANSAC 方法估计 E:
model = sfm.RansacModel()
F, inliers = F_from_ransac(x1n, x2n, model, maxiter=5000, match_threshold=1e-1)
print("F:", F)
P1 = array([[1, 0, 0, 0], [0, 1, 0, 0], [0, 0, 1, 0]])
P2 = sfm.compute_P_from_fundamental(F)
print("P2:", P2)
# triangulate inliers and remove points not in front of both cameras
X = sfm.triangulate(x1n[:, inliers], x2n[:, inliers], P1, P2)
# plot the projection of X
cam1 = camera.Camera(P1)
cam2 = camera.Camera(P2)
x1p = cam1.project(X)
x2p = cam2.project(X)
figure(figsize=(16, 16))
imj = sift.appendimages(im1, im2)
imj = vstack((imj, imj))
imshow(imj)
cols1 = im1.shape[1]
rows1 = im1.shape[0]
for i in range(len(x1p[0])):
if (0<= x1p[0][i]<cols1) and (0<= x2p[0][i]<cols1) and (0<=x1p[1][i]<rows1) and (0<=x2p[1][i]<rows1):
plot([x1p[0][i], x2p[0][i]+cols1],[x1p[1][i], x2p[1][i]],'c')
axis('off')
show()
d1p = d1n[inliers]
d2p = d2n[inliers]
# Read features
im3 = array(Image.open('picture/home/3.jpg'))
sift.process_image('picture/home/3.jpg', 'im3.sift')
l3, d3 = sift.read_features_from_file('im3.sift')
matches13 = sift.match_twosided(d1p, d3)
ndx_13 = matches13.nonzero()[0]
x1_13 = homography.make_homog(x1p[:, ndx_13])
ndx2_13 = [int(matches13[i]) for i in ndx_13]
x3_13 = homography.make_homog(l3[ndx2_13, :2].T)
figure(figsize=(16, 16))
imj = sift.appendimages(im1, im3)
imj = vstack((imj, imj))
imshow(imj)
cols1 = im1.shape[1]
rows1 = im1.shape[0]
for i in range(len(x1_13[0])):
if (0<= x1_13[0][i]<cols1) and (0<= x3_13[0][i]<cols1) and (0<=x1_13[1][i]<rows1) and (0<=x3_13[1][i]<rows1):
plot([x1_13[0][i], x3_13[0][i]+cols1],[x1_13[1][i], x3_13[1][i]],'c')
axis('off')
show()
P3 = sfm.compute_P(x3_13, X[:, ndx_13])
效果:
sift特征匹配:特征匹配点

基础矩阵:

1.2 一个简单的数据集
想要从书上给的网址 http://www.robots.ox.ac.uk/~vgg/data/data-mview.html 中下载牛津多视图数据集下载Merton2数据的压缩文件。下面的脚本可以加载Merton2的数据:
示例:
# -*- coding: utf-8 -*-
import camera
import numpy as np
from PIL import Image
from pylab import *
im1 = array(Image.open('picture/images (1)/001.jpg'))
im2 = array(Image.open('picture/images (1)/002.jpg'))
points2D = [loadtxt('picture/2D (1)/00'+str(i+1)+'.corners').T for i in range(3)]
points3D = loadtxt('picture/3D (1)/p3d').T
corr = genfromtxt('picture/2D (1)/nview-corners',dtype='int',missing_values='*')
P = [camera.Camera(loadtxt('picture/2D (1)/00'+str(i+1)+'.P')) for i in range(3)]
# make 3D points homogeneous and project
X = vstack((points3D,ones(points3D.shape[1])))
x = P[0].project(X)
# plotting the points in view 1
figure()
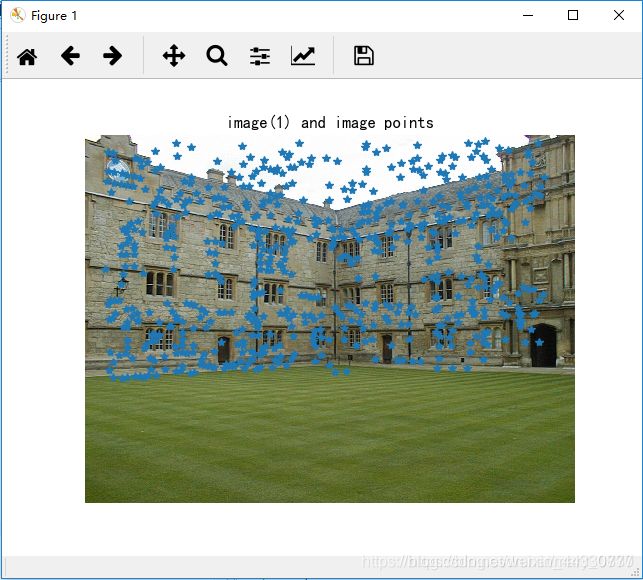
imshow(im1)
plot(points2D[0][0],points2D[0][1],'*')
axis('off')
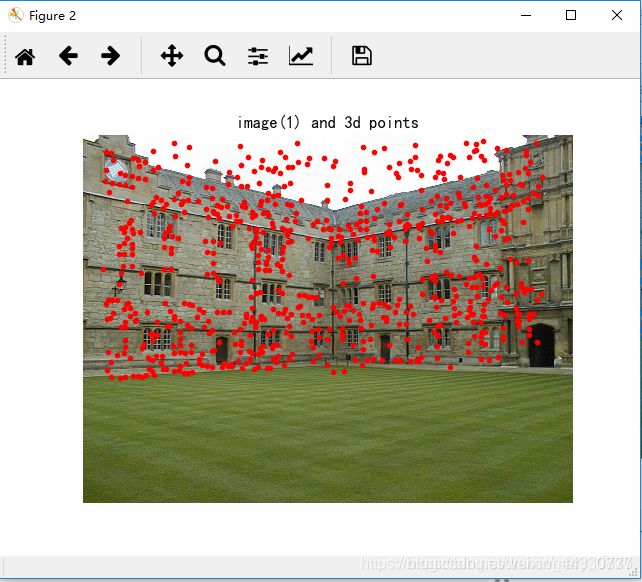
figure()
imshow(im1)
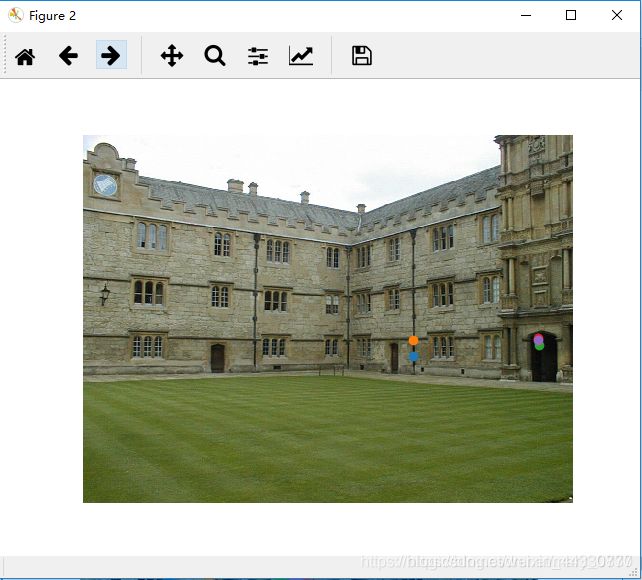
plot(x[0],x[1],'r.')
axis('off')
show()
处理效果:
分析:
仔细观察这些点的分布情况可知,图像点和三维点有些点是重合的,但是并不是完全重合。蓝色这些点代表的是Merton2数据集中的点,红色的点代表的是特征映射过来的坐标。图像特征点 1、对应不同视图图像点重建后的三维点以及照相机参数矩阵(使用上一章的 Camera 类)。这里使用 loadtxt() 函数读取文本文件到 NumPy 数组中。因为并不是所有的点都可见,或都能够成功匹配到所有的视图,所以对应数据里包含了缺失的数据。加载对应数据时需要考虑这一点。genfromtxt() 函数通过将缺失的数值(在文件中用 * 表示)填充为 -1 来解决这个问题。
1.3 用 Matplotlib 绘制三维数据
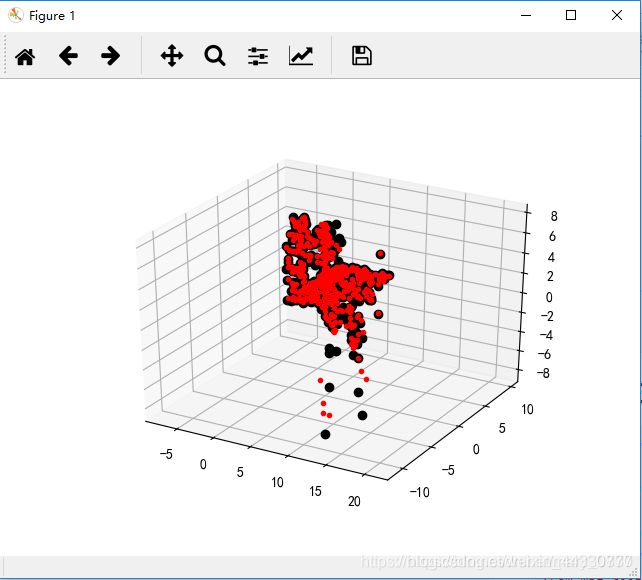
为了可视化三维重建结果,我们需要绘制出三维图像。Matplotlib 中的 mplot3d 工具 包可以方便地绘制出三维点、线、等轮廓线、表面以及其他基本图形组件,还可以 通过图像窗口控件实现三维旋转和缩放。
get_test_data() 函数在 x, y 空间按照设定的空间间隔参数来产生均匀的采样点。
# -*- coding: utf-8 -*-
from mpl_toolkits.mplot3d import axes3d
fig = figure()
ax = fig.gca(projection="3d")
ax.plot(points3D[0],points3D[1],points3D[2],'k.')
#生成三维采样点
X,Y,Z = axes3d.get_test_data(0.25)
#在三维中绘制点
ax.plot(X.flatten(),Y.flatten(),Z.flatten(),'o')
show()
效果:

初始显示:

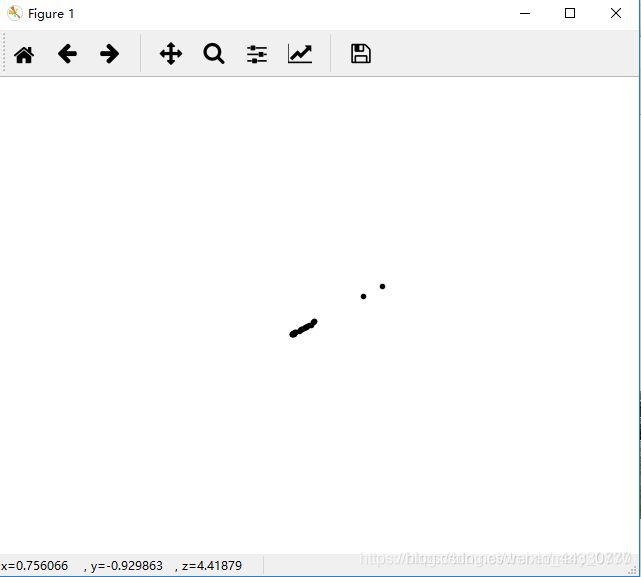
俯视的视图:

分析:
通过旋转上面的坐标系,在不同三维角度显示这些三维数据点的分布。
1.4 外极点和外极线
极点满足 F e 1 = 0 Fe1=0 Fe1=0,因此可以通过计算FF的零空间来得到,将FF转置后输入到函数def compute_epipole(F) 中获得另一幅图像的外极点(对应左零空间的外极点)。
将之前样本数据集的两个视图上运行这个函数:
# -*- coding: utf-8 -*-
from pylab import *
from mpl_toolkits.mplot3d import axes3d
import sfm
#在前两个视图中点的索引
ndx = (corr[:,0]>=0) & (corr[:,1]>=0)
#获得坐标,并将其用齐次坐标表示
x1 = points2D[0][:,corr[ndx,0]]
x1 = vstack((x1,ones(x1.shape[1])))
x2 = points2D[1][:,corr[ndx,1]]
x2 = vstack((x2,ones(x2.shape[1])))
#计算F
F = sfm.compute_fundamental(x1,x2)
#计算极点
e = sfm.compute_epipole(F)
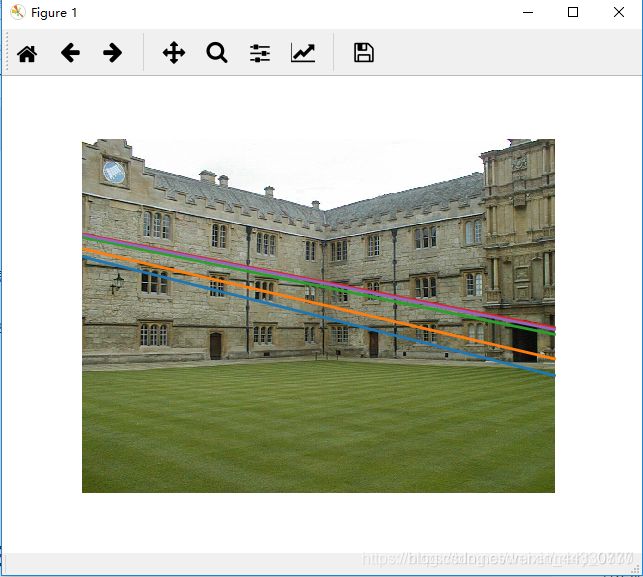
#绘制图像
figure()
imshow(im1)
#分别绘制每条线,这样会绘制出很漂亮的颜色
for i in range(5):
sfm.plot_epipolar_line(im1,F,x2[:,i],e,False)
axis('off')
figure()
imshow(im2)
#分别绘制每个点,这样绘制出和线同样的颜色
for i in range(5):
plot(x2[0,i],x2[1,i],'o')
axis('off')
show()
分析:
首先,选择两幅图像的对应点,然后将它们转换为齐次坐标。 由于缺失的数据在对应列表 corr 中为 -1,所以程序中有可能选取这些点。因此,上面的程序通过数组操作符 & 只选取了索引大于等于 0 的点。最后,在第一个视图中画出了前 5 个外极线,在第二个视图中画出了对应匹配点。主要借助 plot() 函数,将 x 轴的范围作为直线的参数,因此直线超出图像边界的部分会被截断。 如果 show_epipole 为真,外极点也会被画出来(如果输入参数中没有外极点,外极点会在程序中计算获得)。在两幅图中,用不同的颜色将点和相应的外极线对应起来。
(二)照相机和三维结构的计算
2.1 三角剖分
数学定义: 假设V是二维实数域上的有限点集,边e是由点集中的点作为端点构成的封闭线段, E为e的集合。那么该点集V的一个三角剖分T=(V,E)是一个平面图G,该平面图满足条件:
a.除了端点,平面图中的边不包含点集中的任何点。
b.没有相交边。
c.平面图中所有的面都是三角面,且所有三角面的合集是散点集V的凸包。
对于两个照相机P1和P2的视图,三维实物点X的投影点为x1和x2(用齐次坐标表示),照相机方程定义了下面的关系:

由于图像噪声、照相机参数误差和其他系统误差,上面的方程可能没有精确解。可以通过SVD算法来得到三维点的最小二乘估值。
将triangulate_point()和triangulate()函数添加到sfm.py中:
# -*- coding: utf-8 -*-
execfile('aaaaa.py')
# -*- coding: utf-8 -*-
from pylab import *
from mpl_toolkits.mplot3d import axes3d
import sfm
# 在前两个视图中点的索引
ndx = (corr[:,0]>=0) & (corr[:,1]>=0)
# 获得坐标,并将其用齐次坐标表示
x1 = points2D[0][:,corr[ndx,0]]
x1 = vstack((x1,ones(x1.shape[1])))
x2 = points2D[1][:,corr[ndx,1]]
x2 = vstack((x2,ones(x2.shape[1])))
Xtrue = points3D[:,ndx]
Xtrue = vstack( (Xtrue,ones(Xtrue.shape[1])) )
# 检查前三个点
Xest = sfm.triangulate(x1,x2,P[0].P,P[1].P)
print Xest[:,:3]
print Xtrue[:,:3]
# 绘制图像
fig = figure()
ax = fig.gca(projection='3d')
ax.plot(Xest[0],Xest[1],Xest[2],'ko')
ax.plot(Xtrue[0],Xtrue[1],Xtrue[2],'r.')
axis('equal')
show()
计算一个点对的最小二乘三角剖分:
def triangulate_point(x1, x2, P1, P2):
""" Point pair triangulation from
least squares solution. """
M = zeros((6, 6))
M[:3, :4] = P1
M[3:, :4] = P2
M[:3, 4] = -x1
M[3:, 5] = -x2
U, S, V = linalg.svd(M)
X = V[-1, :4]
return X / X[3]
最后一个特征向量的前 4 个值就是齐次坐标系下的对应三维坐标。可以增加下面的函数来实现多个点的三角剖分:
def triangulate(x1, x2, P1, P2):
""" Two-view triangulation of points in
x1,x2 (3*n homog. coordinates). """
n = x1.shape[1]
if x2.shape[1] != n:
raise ValueError("Number of points don't match.")
X = [triangulate_point(x1[:, i], x2[:, i], P1, P2) for i in range(n)]
return array(X).T
效果:
 分析:
分析:
这个算法估计出的三维图像点和实际图像点很接近。估计点和实际点可以很好地进行匹配。
2.2 由三维点计算照相机矩阵
从照相机方程可以得出,每个三维点 X i Xi Xi(齐次坐标系下)按照 λ i x i = P X i λixi=PXi λixi=PXi 投影到图像点 x i = [ x i , y i , 1 ] xi=[xi,yi,1] xi=[xi,yi,1],相应的点满足下面的关系:

其中 p 1 、 p 2 p1、p2 p1、p2和 p 3 p3 p3是矩阵 P P P的三行。上面的式子可以写得更紧凑,如下所示:
M v = 0 Mv=0 Mv=0
SVD分解估计出照相机矩阵。利用上面讲述的矩阵操作,选出第一个视图中的可见点(使用对应列表中缺失的数值),将它们转换成齐次坐标表示,然后估计照相机矩阵:
# -*- coding: utf-8 -*-
import camera
import numpy as np
from PIL import Image
from pylab import *
im1 = array(Image.open('picture/images (1)/001.jpg'))
im2 = array(Image.open('picture/images (1)/002.jpg'))
points2D = [loadtxt('picture/2D (1)/00'+str(i+1)+'.corners').T for i in range(3)]
points3D = loadtxt('picture/3D (1)/p3d').T
corr = genfromtxt('picture/2D (1)/nview-corners',dtype='int',missing_values='*')
P = [camera.Camera(loadtxt('picture/2D (1)/00'+str(i+1)+'.P')) for i in range(3)]
corr = corr[:,0] # 视图 1
ndx3D = where(corr>=0)[0] # 丢失的数值为 -1
ndx2D = corr[ndx3D]
# 选取可见点,并用齐次坐标表示
x = points2D[0][:,ndx2D] # 视图 1
x = vstack( (x,ones(x.shape[1])) )
X = points3D[:,ndx3D]
X = vstack( (X,ones(X.shape[1])) )
# 估计 P
Pest = camera.Camera(sfm.compute_P(x,X))
# 比较!
print (Pest.P/Pest.P[2,3])
print (P[0].P/P[0].P[2, 3])
xest = Pest.project(X)
# 绘制图像
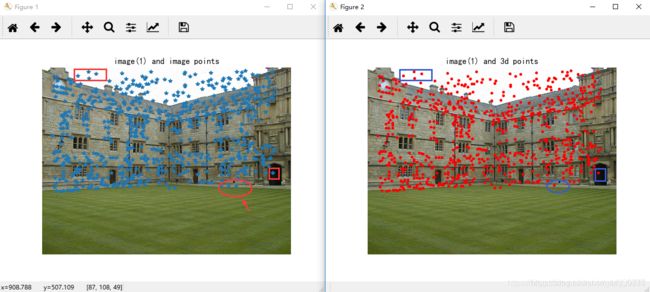
figure()
imshow(im1)
plot(x[0],x[1],'bo')
plot(xest[0],xest[1],'r.')
axis('off')
show()
得到矩阵,下面是数据集的创建者计算出的照相机矩阵。可以看出,它们的元素几乎完全相同。最后使用估计出的照相机矩阵投影这些三维点,然后绘制出投影后的结果:
其中,真实点用圆圈表示,估计出的照相机投影点用点表示 
2.3 由基础矩阵计算照相机矩阵
在两个视图的场景中,照相机矩阵可以由基础矩阵恢复出来。假设第一个照相机矩阵归一化为 P 1 = [ I ∣ 0 ] P1=[I∣0] P1=[I∣0],现在我们需要计算出第二个照相机矩阵 P 2 P2 P2。研究分为两类, 未标定的情况和已标定的情况。
- 未标定的情况——投影重建
在没有任何照相机内参数知识的情况下,照相机矩阵只能通过射影变换恢复出来。也就是说,如果利用照相机的信息来重建三维点,那么该重建只能由射影变换计算出来(可以得到整个投影场景中无畸变的重建点)。在这里,不考虑角度和距离。
定义: 在无标定的情况下,第二个照相机矩阵可以使用一个(3×3)的射影变换得到。
一个简单的方法就是:
P 2 = [ S e F ∣ e ] P2=[SeF∣e] P2=[SeF∣e]
其中, e e e是左极点,满足 e T F = 0 eTF=0 eTF=0, S e Se Se是公式所示的反对称矩阵。需要注意的是,使用该矩阵做出的三角形剖分很有可能会发生畸变,如倾斜的重建。
示例:
def compute_P_from_fundamental(F):
"""从基础矩阵中计算第二个照相机矩阵(假设 P1 = [I 0])"""
e = compute_epipole(F,T) #左极点
Te = skew(e)
return vstack((dot(Te,F.T).T,e)).T
def skew(a):
"""反对称矩阵A,使得对于每个v有a×v=Av"""
return array([[0,-a[2],a[1]],[a[2],0,-a[0]],[-a[1],a[0],0]])
已标定的情况——度量重建
在已经标定的情况下,重建会保持欧式空间中的一些度量特性(除了全局的尺度参数)。
定义: 给定标定矩阵 K K K,可以将它的逆 K − 1 K−1 K−1 作用于图像点 x K = K − 1 x xK=K−1x xK=K−1x,因此,在新的图像坐标系下,照相机方程变为: x K = K − 1 K [ R ∣ t ] X = [ R ∣ t ] X xK=K−1K[R∣t]X=[R∣t]X xK=K−1K[R∣t]X=[R∣t]X
在新的图像坐标系下,点同样满足之前的基础矩阵方程: x K 2 T F x K 1 = 0 xK2TFxK1=0 xK2TFxK1=0
在标定归一化的坐标系下,基础矩阵称为本质矩阵。为了区别为标定后的情况,以及归一化了的图像坐标,通常将其记为 E E E,而非 F F F。
从本质矩阵中恢复出的照相机矩阵中存在度量关系,但有四个可能解。因为只有一个解产生位于两个照相机前的场景,所以可以从中选出来。
计算4个解:
def compute_P_from_essential(E):
"""从本质矩阵中计算第二个照相机矩阵(假设 P1 = [I 0])
输出为4个可能的照相机矩阵列表"""
# 保证E的秩为2
U, S, V = svd(E)
if det(dot(U, V)) < 0:
V = -V
E = dot(U, dot(diag([1, 1, 0]), V))
# 创建矩阵(Hartley)
Z = skew([0, 0, -1])
W = array([[0, -1, 0], [1, 0, 0], [0, 0, 1]])
# 返回所有(4个)解
P2 = [vstack((dot(U, dot(W, V)).T, U[:, 2])).T,
vstack((dot(U, dot(W, V)).T, -U[:, 2])).T,
vstack((dot(U, dot(W.T, V)).T, U[:, 2])).T,
vstack((dot(U, dot(W.T, V)).T, -U[:, 2])).T]
return P2
实验步骤:
-
用SIFT算法实现两幅图像的特征点检测,找到对应的匹配点并绘制出来;
-
使用RANSAC方法估计最佳基础矩阵F,以及正确点的索引,求出不同图像对的基础矩阵;
-
由基础矩阵计算照相机矩阵;
-
从照相机矩阵的列表中,对正确点的三维点进行三角剖分,挑选出经过三角剖分后,在两个照相机前均含有最多场景点。
# -*- coding: utf-8 -*-
# -*- coding: utf-8 -*-
from PIL import Image
from numpy import *
from pylab import *
import numpy as np
from PCV.geometry import camera
import homography
from PCV.geometry import sfm
from PCV.localdescriptors import sift
from imp import reload
camera = reload(camera)
homography = reload(homography)
sfm = reload(sfm)
sift = reload(sift)
# Read features
im1 = array(Image.open(' /1.jpg'))
im2 = array(Image.open(' /2.jpg'))
sift.process_image(' /1.jpg','im1.sift')
l0, d0 = sift.read_features_from_file('im1.sift')
sift.process_image(' /2.jpg','im2.sift')
l1, d1 = sift.read_features_from_file('im2.sift')
matches = sift.match_twosided(d1, d2)
ndx = matches.nonzero()[0]
x1 = homography.make_homog(l1[ndx, :2].T)
ndx2 = [int(matches[i]) for i in ndx]
x2 = homography.make_homog(l2[ndx2, :2].T)
d1n = d1[ndx]
d2n = d2[ndx2]
x1n = x1.copy()
x2n = x2.copy()
figure(figsize=(16, 16))
sift.plot_matches(im1, im2, l1, l2, matches, True)
show()
# def F_from_ransac(x1, x2, model, maxiter=5000, match_threshold=1e-6):
def F_from_ransac(x1, x2, model, maxiter=5000, match_threshold=1e-6):
""" Robust estimation of a fundamental matrix F from point
correspondences using RANSAC (ransac.py from
http://www.scipy.org/Cookbook/RANSAC).
input: x1, x2 (3*n arrays) points in hom. coordinates. """
from PCV.tools import ransac
data = np.vstack((x1, x2))
d = 10 # 20 is the original
# compute F and return with inlier index
F, ransac_data = ransac.ransac(data.T, model,
8, maxiter, match_threshold, d, return_all=True)
return F, ransac_data['inliers']
# find F through RANSAC
model = sfm.RansacModel()
F, inliers = F_from_ransac(x1n, x2n, model, maxiter=5000, match_threshold=1e-3)
print (F)
P1 = array([[1, 0, 0, 0], [0, 1, 0, 0], [0, 0, 1, 0]])
P2 = sfm.compute_P_from_fundamental(F)
print (P2)
print (F)
# triangulate inliers and remove points not in front of both cameras
X = sfm.triangulate(x1n[:, inliers], x2n[:, inliers], P1, P2)
# plot the projection of X
cam1 = camera.Camera(P1)
cam2 = camera.Camera(P2)
x1p = cam1.project(X)
x2p = cam2.project(X)
figure(figsize=(16, 16))
imj = sift.appendimages(im1, im2)
imj = vstack((imj, imj))
imshow(imj)
cols1 = im1.shape[1]
rows1 = im1.shape[0]
for i in range(len(x1p[0])):
if (0 <= x1p[0][i] < cols1) and (0 <= x2p[0][i] < cols1) and (0 <= x1p[1][i] < rows1) and (0 <= x2p[1][i] < rows1):
plot([x1p[0][i], x2p[0][i] + cols1], [x1p[1][i], x2p[1][i]], 'c')
axis('off')
show()
d1p = d1n[inliers]
d2p = d2n[inliers]
# Read features
im3 = array(Image.open(' /3.jpg'))
sift.process_image(' /3.jpg','im3.sift')
l3, d3 = sift.read_features_from_file('im3.sift')
matches13 = sift.match_twosided(d1p, d3)
ndx_13 = matches13.nonzero()[0]
x1_13 = homography.make_homog(x1p[:, ndx_13])
ndx2_13 = [int(matches13[i]) for i in ndx_13]
x3_13 = homography.make_homog(l3[ndx2_13, :2].T)
figure(figsize=(16, 16))
imj = sift.appendimages(im1, im3)
imj = vstack((imj, imj))
imshow(imj)
cols1 = im1.shape[1]
rows1 = im1.shape[0]
for i in range(len(x1_13[0])):
if (0 <= x1_13[0][i] < cols1) and (0 <= x3_13[0][i] < cols1) and (0 <= x1_13[1][i] < rows1) and (
0 <= x3_13[1][i] < rows1):
plot([x1_13[0][i], x3_13[0][i] + cols1], [x1_13[1][i], x3_13[1][i]], 'c')
axis('off')
show()
P3 = sfm.compute_P(x3_13, X[:, ndx_13])
print (P3)
print (P1)
print (P2)
print (P3)
sift特征匹配结果:

处理过后:

照相机矩阵:


室内:
sift特征匹配:

特征匹配:

照相机矩阵:

分析:
由上面室外的结果看出,第一个照相机位置和第二个照相机位置匹配的结果相比之下,效果比较好;而第一个照相机位置和第三个照相机为止的匹配效果并没那么好,匹配的点比较少。从室内的结果看出,照相机的位置和图像呈现的匹配点有关系,拍摄的角度和清晰度会对图像匹配产生影响。
(三)三维重建
由于照相机的运动给我们提供了三维结构,从多幅图像中计算出真实的三维重建通常称为SFM(从运动中恢复结构)。
计算重建:
- 检测特征点,然后在两幅图像间匹配;
- 由匹配计算基础矩阵;
- 由基础矩阵计算照相机矩阵;
- 三角剖分这些三维点。
3.1 稳健估计基础矩阵
类似之前稳健计算单应性矩阵,当存在噪声和不正确的匹配时,需要估计基础矩阵。 使用RANSAC方法,结合了八点算法。需要注意的是,八点算法在平面场景中会失效。所以,如果场景点都位于平面上,就不能使用这种算法。
代码添加到sfm.py文档:
compute_fundamental_normalized()函数将图像点归一化为零均值固定方差
def F_from_ransac(x1,x2,model,maxiter=5000,match_theshold=1e-6):
"""使用RANSAC方法,从点对应中稳健地估计基础矩阵F
输入:使用齐次坐标表示的点x1,x2(3*n的数组)"""
import ransac
data = vstack((x1,x2))
#计算F,并返回正确点索引
F,ransac_data = ransac.ransac(data.T,model,8,maxiter,match_theshold,20,return_all=True)
return F,ransac_data['inliers']
def compute_fundamental_normalized(x1,x2):
"""使用归一化的八点算法,由对应点(x1,x2 3*n 的数组)计算基础矩阵"""
n = x1.shape[1]
if x2.shape[1]!=n:
raise ValueError("Number of points don't match.")
#归一化图像坐标
x1 = x1/x1[2]
mean_1 = mean(x1[:2],axis=1)
S1 = sqrt(2)/std(x1[:2])
T1 = array([[S1,0,-S1*mean_1[0]],[0,S1,-S1*mean_1[1]],[0,0,1]])
x1 = dot(T1,x1)
x2 = x2/x2[2]
mean_2 = mean(x2[:2],axis=1)
S2 = sqrt(2)/std(x2[:2])
T2 = array([[S2,0,-S2*mean_2[0]],[0,S2,-S2*mean_2[1]],[0,0,1]])
x2 = dot(T2,x2)
#使用归一化的坐标计算F
F = compute_fundamental(x1,x2)
#反归一化
F = dot(T1.T,dot(F,T2))
return F/F[2,2]
class RansacModel(object):
"""用从http://www.scipy.org/Cookbook/RANSAC 下载的ransac.py 计算基础矩阵的类"""
def __init__(self,debug=False):
self.debug = debug
def fit(self,data):
"""使用选择的8个对应计算基础矩阵"""
#转置,并将数据分成两个点集
data = data.T
x1 = data[:3,:8]
x2 = data[3:,:8]
#估算基础矩阵,并返回
F = compute_fundamental_normalized(x1,x2)
return F
def get_error(self,data,F):
"""计算所有对应的x^T F X,并返回每个变换后点的误差"""
#转置,并将数据分成两个点集
data = data.T
x1 = data[:3]
x2 = data[3:]
#将sampson距离用作误差度量
Fx1 = dot(F,x1)
Fx2 = dot(F,x2)
denom = Fx1[0]**2 + Fx1[1]**2 + Fx2[0]**2 +Fx2[1]**2
err = (diag(dot(x1.T,dot(F,x2)))) **2/denom
#返回每个点的误差
return err
3.2 三维重建
# -*- coding: utf-8 -*-
from PIL import Image
from numpy import *
from pylab import *
import numpy as np
import homography
import sfm
import sift
# 标定矩阵
K = array([[2394,0,932],[0,2398,628],[0,0,1]])
# 载入图像,并计算特征
im1 = array(Image.open('picture/home/1.jpg'))
im2 = array(Image.open('picture/home/2.jpg'))
sift.process_image('picture/home/1.jpg','im1.sift')
l0, d0 = sift.read_features_from_file('im1.sift')
sift.process_image('picture/home/2.jpg','im2.sift')
l1, d1 = sift.read_features_from_file('im2.sift')
# 匹配特征
matches = sift.match_twosided(d1,d2)
ndx = matches.nonzero()[0]
# 使用齐次坐标表示,并使用inv(K)归一化
x1 = homography.make_homog(l1[ndx,:2].T)
ndx2 = [int(matches[i]) for i in ndx]
x2 = homography.make_homog(l2[ndx2,:2].T)
x1n = dot(inv(K),x1)
x2n = dot(inv(K),x2)
# 使用RANSAC方法估计E
model = sfm.RansacModel()
E,inliers = sfm.F_from_ransac(x1n,x2n,model)
# 计算照相机矩阵(P2是4个解的列表)
P1 = array([[1,0,0,0],[0,1,0,0],[0,0,1,0]])
P2 = sfm.compute_P_from_essential(E)
# 选取点在照相机前的解
ind = 0
maxres = 0
for i in range(4):
# 三角剖分正确点,并计算每个照相机的深度
X = sfm.triangulate(x1n[:,inliers],x2n[:,inliers],P1,P2[i])
d1 = dot(P1,X)[2]
d2 = dot(P2[i],X)[2]
if sum(d1>0)+sum(d2>0) > maxres:
maxres = sum(d1>0)+sum(d2>0)
ind = i
infront = (d1>0) & (d2>0)
# 三角剖分正确点,并移除不在所有照相机前面的点
X = sfm.triangulate(x1n[:,inliers],x2n[:,inliers],P1,P2[ind])
X = X[:,infront]
# 绘制三维图像
from mpl_toolkits.mplot3d import axes3d
fig = figure()
ax = fig.gca(projection='3d')
ax.plot(-X[0], X[1], X[2], 'k.')
axis('off')
# 绘制X的投影 import camera
# 绘制三维点
cam1 = camera.Camera(P1)
cam2 = camera.Camera(P2[ind])
x1p = cam1.project(X)
x2p = cam2.project(X)
# 反K归一化
x1p = dot(K, x1p)
x2p = dot(K, x2p)
figure()
imshow(im1)
gray()
plot(x1p[0], x1p[1], 'o')
plot(x1[0], x1[1], 'r.')
axis('off')
figure()
imshow(im2)
gray()
plot(x2p[0], x2p[1], 'o')
plot(x2[0], x2[1], 'r.')
axis('off')
show()
ransac算法算出的模型参数:


分析:
二次投影后的点和原始特征位置不完全匹配, 但是相当接近。可以进一步调整照相机矩阵来提高重建和二次投影的性能。
(四)问题求助
由于本人电脑的一些问题,本章部分实验结果系实验室师姐的实验数据。问题解决后,再更新自己的。
在这两章的代码编写运行在pycharm2020.1上的python3.7遇见。sift算法运行不了,由于版权所限,于是下载了python2.7.18,加载进pycharm中时发现改不了路径,默认环境依然是python37,出现环境交叉。试过一些网上的19年,18年的在pycharm 同时运行python27和36的方法,失败,出现PIL和pylab无法下载安装在python27当中,需要更新pip




当我更新pip时却显示下载成功但是无法更新的情况,这是什么限制呢?
 这个路径如何成功修改?
这个路径如何成功修改?
或者怎样在新版本pycharm里面完好运行python27和37?建虚拟环境也没能达到效果…
求助!