从零开始深度学习0616——pytorch入门之GAN+dynamic torch+GPU(cuda)+dropout+BN
#-------------------------------conditional GAN-----------------
###################################################################################################################################
参考百度百科
https://baike.baidu.com/item/Gan/22181905?fr=aladdin
GAN 基本简介
模型通过框架中(至少)两个模块:生成模型(Generative Model)和判别模型(Discriminative Model)的互相博弈学习产生相当好的输出。原始 GAN 理论中,并不要求 G 和 D 都是神经网络,只需要是能拟合相应生成和判别的函数即可。但实用中一般均使用深度神经网络作为 G 和 D 。一个优秀的GAN应用需要有良好的训练方法,否则可能由于神经网络模型的自由性而导致输出不理想。
机器学习的模型可大体分为两类,生成模型(Generative Model)和判别模型(Discriminative Model)。判别模型需要输入变量 ,通过某种模型来预测 。生成模型是给定某种隐含信息,来随机产生观测数据。举个简单的例子,
- 判别模型:给定一张图,判断这张图里的动物是猫还是狗
- 生成模型:给一系列猫的图片,生成一张新的猫咪(不在数据集里)
对于判别模型,损失函数是容易定义的,因为输出的目标相对简单。但对于生成模型,损失函数的定义就不是那么容易。我们对于生成结果的期望,往往是一个暧昧不清,难以数学公理化定义的范式。所以不妨把生成模型的回馈部分,交给判别模型处理。这就是Goodfellow他将机器学习中的两大类模型,Generative和Discrimitive给紧密地联合在了一起 。
GAN的基本原理其实非常简单,这里以生成图片为例进行说明。假设我们有两个网络,G(Generator)和D(Discriminator)。正如它的名字所暗示的那样,它们的功能分别是:
- G是一个生成图片的网络,它接收一个随机的噪声z,通过这个噪声生成图片,记做G(z)。
- D是一个判别网络,判别一张图片是不是“真实的”。它的输入参数是x,x代表一张图片,输出D(x)代表x为真实图片的概率,如果为1,就代表100%是真实的图片,而输出为0,就代表不可能是真实的图片。
在训练过程中,生成网络G的目标就是尽量生成真实的图片去欺骗判别网络D。而D的目标就是尽量把G生成的图片和真实的图片分别开来。这样,G和D构成了一个动态的“博弈过程”。
最后博弈的结果是什么?在最理想的状态下,G可以生成足以“以假乱真”的图片G(z)。对于D来说,它难以判定G生成的图片究竟是不是真实的,因此D(G(z)) = 0.5。
这样我们的目的就达成了:我们得到了一个生成式的模型G,它可以用来生成图片。
主要应用:
图像生成,如超分辨率任务,语义分割 图像翻译,卡通人物生成,人体姿态生成,年龄变换,风格变换
图像增强
…….
GAN 损失函数的理解
https://www.jianshu.com/p/588318e69eae
https://www.cnblogs.com/walter-xh/p/10051634.html
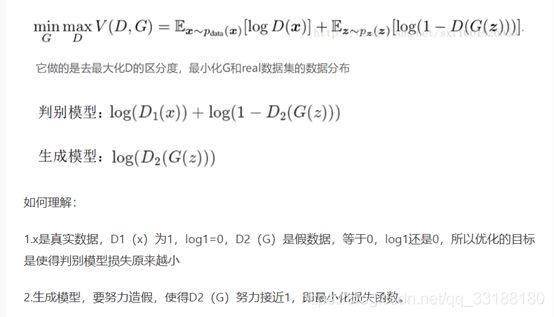
主要做到minG和maxD。
相互博弈产生良性结果
完整代码:
在上下区间中,迭代10000次,通过输入随机点,在上下蓝红曲线中,生成曲线
import torch
import torch.nn as nn
import numpy as np
import matplotlib.pyplot as plt
# torch.manual_seed(1) # reproducible
# np.random.seed(1)
# Hyper Parameters
BATCH_SIZE = 64
LR_G = 0.0001 # learning rate for generator
LR_D = 0.0001 # learning rate for discriminator
N_IDEAS = 5 # think of this as number of ideas for generating an art work (Generator)
ART_COMPONENTS = 15 # it could be total point G can draw in the canvas
PAINT_POINTS = np.vstack([np.linspace(-1, 1, ART_COMPONENTS) for _ in range(BATCH_SIZE)])
# show our beautiful painting range
plt.plot(PAINT_POINTS[0], 2 * np.power(PAINT_POINTS[0], 2) + 1, c='#74BCFF', lw=3, label='upper bound')
plt.plot(PAINT_POINTS[0], 1 * np.power(PAINT_POINTS[0], 2) + 0, c='#FF9359', lw=3, label='lower bound')
plt.legend(loc='upper right')
plt.show()
def artist_works_with_labels(): # painting from the famous artist (real target)
a = np.random.uniform(1, 2, size=BATCH_SIZE)[:, np.newaxis]
paintings = a * np.power(PAINT_POINTS, 2) + (a-1)
labels = (a-1) > 0.5 # upper paintings (1), lower paintings (0), two classes
paintings = torch.from_numpy(paintings).float()
labels = torch.from_numpy(labels.astype(np.float32))
return paintings, labels
G = nn.Sequential( # Generator
nn.Linear(N_IDEAS+1, 128), # random ideas (could from normal distribution) + class label
nn.ReLU(),
nn.Linear(128, ART_COMPONENTS), # making a painting from these random ideas
)
D = nn.Sequential( # Discriminator
nn.Linear(ART_COMPONENTS+1, 128), # receive art work either from the famous artist or a newbie like G with label
nn.ReLU(),
nn.Linear(128, 1),
nn.Sigmoid(), # tell the probability that the art work is made by artist
)
opt_D = torch.optim.Adam(D.parameters(), lr=LR_D)
opt_G = torch.optim.Adam(G.parameters(), lr=LR_G)
plt.ion() # something about continuous plotting
for step in range(10000):
artist_paintings, labels = artist_works_with_labels() # real painting, label from artist 真实的数据和标签
G_ideas = torch.randn(BATCH_SIZE, N_IDEAS) # random ideas 随机在纵坐标生成BATCH_SIZE个数据 在横坐标生成N_IDEAS个数据
G_inputs = torch.cat((G_ideas, labels), 1) # ideas with labels 将生成的数据和真实标签按行拼接
G_paintings = G(G_inputs) # fake painting w.r.t label from G 将假的拼接好的数据 输入到生成器
D_inputs0 = torch.cat((artist_paintings, labels), 1) # all have their labels 真实的数据和标签
D_inputs1 = torch.cat((G_paintings, labels), 1) # 生成的数据和标签
prob_artist0 = D(D_inputs0) # D try to increase this prob 真实数据和标签输入到判别器
prob_artist1 = D(D_inputs1) # D try to reduce this prob 生成的数据和标签输入到判别器
D_score0 = torch.log(prob_artist0) # maximise this for D 真实的数据的判别器的得分
D_score1 = torch.log(1. - prob_artist1) # maximise this for D 生成的数据的判别器的得分
D_loss = - torch.mean(D_score0 + D_score1) # minimise the negative of both two above for D 定义三重态损失函数 为了使损失函数小,就迫使prob_artist0 越大,prob_artist1越小
G_loss = torch.mean(D_score1) # minimise D score w.r.t G 生成器损失函数 只对生成的数据
opt_D.zero_grad()
D_loss.backward(retain_graph=True) # reusing computational graph 保留参数 留给下次反向传播
opt_D.step()
opt_G.zero_grad()
G_loss.backward()
opt_G.step()
if step % 200 == 0: # plotting
plt.cla()
plt.plot(PAINT_POINTS[0], G_paintings.data.numpy()[0], c='#4AD631', lw=3, label='Generated painting',)
bound = [0, 0.5] if labels.data[0, 0] == 0 else [0.5, 1]
plt.plot(PAINT_POINTS[0], 2 * np.power(PAINT_POINTS[0], 2) + bound[1], c='#74BCFF', lw=3, label='upper bound')
plt.plot(PAINT_POINTS[0], 1 * np.power(PAINT_POINTS[0], 2) + bound[0], c='#FF9359', lw=3, label='lower bound')
plt.text(-.5, 2.3, 'D accuracy=%.2f (0.5 for D to converge)' % prob_artist0.data.numpy().mean(), fontdict={'size': 13})
plt.text(-.5, 2, 'D score= %.2f (-1.38 for G to converge)' % -D_loss.data.numpy(), fontdict={'size': 13})
plt.text(-.5, 1.7, 'Class = %i' % int(labels.data[0, 0]), fontdict={'size': 13})
plt.ylim((0, 3));plt.legend(loc='upper right', fontsize=10);plt.draw();plt.pause(0.1)
plt.ioff()
plt.show()
# plot a generated painting for upper class
z = torch.randn(1, N_IDEAS)
label = torch.FloatTensor([[1.]]) # for upper class
G_inputs = torch.cat((z, label), 1)
G_paintings = G(G_inputs)
plt.plot(PAINT_POINTS[0], G_paintings.data.numpy()[0], c='#4AD631', lw=3, label='G painting for upper class',)
plt.plot(PAINT_POINTS[0], 2 * np.power(PAINT_POINTS[0], 2) + bound[1], c='#74BCFF', lw=3, label='upper bound (class 1)')
plt.plot(PAINT_POINTS[0], 1 * np.power(PAINT_POINTS[0], 2) + bound[0], c='#FF9359', lw=3, label='lower bound (class 1)')
plt.ylim((0, 3));plt.legend(loc='upper right', fontsize=10);plt.show()
运行结果:

--------------------------------------为什么torch是动态的--------------------------------------------------
##############################################################################################################################################
与tensorflow 不同
Tensorflow 是静态的编辑器,先建立好一个静态的图表,然后再把数据放到图表中进行计算,然后再反向传递更新这些参数
因为在某些实际情况可能batch_size 和 time_step 是不确定的
但是又不能两个同时不确定 这时程序会报错
例子使用RNN的time_step 随机来实现
完整代码:
import torch
from torch import nn
import numpy as np
import matplotlib.pyplot as plt
# torch.manual_seed(1) # reproducible
# Hyper Parameters
INPUT_SIZE = 1 # rnn input size / image width
LR = 0.02 # learning rate
class RNN(nn.Module):
def __init__(self):
super(RNN, self).__init__()
self.rnn = nn.RNN(
input_size=1,
hidden_size=32, # rnn hidden unit
num_layers=1, # number of rnn layer
batch_first=True, # input & output will has batch size as 1s dimension. e.g. (batch, time_step, input_size)
)
self.out = nn.Linear(32, 1)
def forward(self, x, h_state):
# x (batch, time_step, input_size)
# h_state (n_layers, batch, hidden_size)
# r_out (batch, time_step, output_size)
r_out, h_state = self.rnn(x, h_state)
outs = [] # this is where you can find torch is dynamic
for time_step in range(r_out.size(1)): # calculate output for each time step
outs.append(self.out(r_out[:, time_step, :]))
return torch.stack(outs, dim=1), h_state
rnn = RNN()
print(rnn)
optimizer = torch.optim.Adam(rnn.parameters(), lr=LR) # optimize all cnn parameters
loss_func = nn.MSELoss() # the target label is not one-hotted
h_state = None # for initial hidden state
plt.figure(1, figsize=(12, 5))
plt.ion() # continuously plot
######################## Below is different #########################
################ static time steps ##########
# for step in range(60):
# start, end = step * np.pi, (step+1)*np.pi # time steps
# # use sin predicts cos
# steps = np.linspace(start, end, 10, dtype=np.float32)
################ dynamic time steps #########
step = 0
for i in range(60):
dynamic_steps = np.random.randint(1, 4) # has random time steps 随机步长 动态化 使每次输入的步长都是不一样的
start, end = step * np.pi, (step + dynamic_steps) * np.pi # different time steps length
step += dynamic_steps
# use sin predicts cos
steps = np.linspace(start, end, 10 * dynamic_steps, dtype=np.float32)
####################### Above is different ###########################
print(len(steps)) # print how many time step feed to RNN
x_np = np.sin(steps) # float32 for converting torch FloatTensor
y_np = np.cos(steps)
x = torch.from_numpy(x_np[np.newaxis, :, np.newaxis]) # shape (batch, time_step, input_size)
y = torch.from_numpy(y_np[np.newaxis, :, np.newaxis])
prediction, h_state = rnn(x, h_state) # rnn output
# !! next step is important !!
h_state = h_state.data # repack the hidden state, break the connection from last iteration
loss = loss_func(prediction, y) # cross entropy loss
optimizer.zero_grad() # clear gradients for this training step
loss.backward() # backpropagation, compute gradients
optimizer.step() # apply gradients
# plotting
plt.plot(steps, y_np.flatten(), 'r-')
plt.plot(steps, prediction.data.numpy().flatten(), 'b-')
plt.draw()
plt.pause(0.05)
plt.ioff()
plt.show()
运行结果:

---------------------------------------------GPU-----------------------------------------------------------------
###########################################################################################################################################
套用之前CNN实现数字识别的代码
简单加上几个方法
对训练数据 网络模型等 加上.cuda() 的方法
import torch
import torch.nn as nn
import torch.utils.data as Data
import torchvision
# torch.manual_seed(1)
EPOCH = 1
BATCH_SIZE = 50
LR = 0.001
DOWNLOAD_MNIST = False
train_data = torchvision.datasets.MNIST(root='./mnist/', train=True, transform=torchvision.transforms.ToTensor(), download=DOWNLOAD_MNIST,)
train_loader = Data.DataLoader(dataset=train_data, batch_size=BATCH_SIZE, shuffle=True)
test_data = torchvision.datasets.MNIST(root='./mnist/', train=False)
# !!!!!!!! Change in here !!!!!!!!! #
test_x = torch.unsqueeze(test_data.test_data, dim=1).type(torch.FloatTensor)[:2000].cuda()/255. # Tensor on GPU
test_y = test_data.test_labels[:2000].cuda()
class CNN(nn.Module):
def __init__(self):
super(CNN, self).__init__()
self.conv1 = nn.Sequential(nn.Conv2d(in_channels=1, out_channels=16, kernel_size=5, stride=1, padding=2,),
nn.ReLU(), nn.MaxPool2d(kernel_size=2),)
self.conv2 = nn.Sequential(nn.Conv2d(16, 32, 5, 1, 2), nn.ReLU(), nn.MaxPool2d(2),)
self.out = nn.Linear(32 * 7 * 7, 10)
def forward(self, x):
x = self.conv1(x)
x = self.conv2(x)
x = x.view(x.size(0), -1)
output = self.out(x)
return output
cnn = CNN()
# !!!!!!!! Change in here !!!!!!!!! #
cnn.cuda() # Moves all model parameters and buffers to the GPU.
optimizer = torch.optim.Adam(cnn.parameters(), lr=LR)
loss_func = nn.CrossEntropyLoss()
for epoch in range(EPOCH):
for step, (x, y) in enumerate(train_loader):
# !!!!!!!! Change in here !!!!!!!!! #
b_x = x.cuda() # Tensor on GPU
b_y = y.cuda() # Tensor on GPU
output = cnn(b_x)
loss = loss_func(output, b_y)
optimizer.zero_grad()
loss.backward()
optimizer.step()
if step % 50 == 0:
test_output = cnn(test_x)
# !!!!!!!! Change in here !!!!!!!!! #
pred_y = torch.max(test_output, 1)[1].cuda().data # move the computation in GPU
accuracy = torch.sum(pred_y == test_y).type(torch.FloatTensor) / test_y.size(0)
print('Epoch: ', epoch, '| train loss: %.4f' % loss.data.cpu().numpy(), '| test accuracy: %.2f' % accuracy)
test_output = cnn(test_x[:10])
# !!!!!!!! Change in here !!!!!!!!! #
pred_y = torch.max(test_output, 1)[1].cuda().data # move the computation in GPU
print(pred_y, 'prediction number')
print(test_y[:10], 'real number')
运行结果 :
在一定轮数的训练之后 输入预测值和真实值的比较
GPU加速后 肉眼可见的训练速度加快
-------------------------------------------dropout-----------------------------------------------------------------
#############################################################################################################################################
torch.nn.Dropout(0.5),
每次随机抽取一定百分比的神经元 去进行传播
用训练次数来弥补可能丢失的信息
训练时需要dropout 但是测试时不需要

训练时需要dropout 但是测试时不需要。
所以在测试之前需要把dropout屏蔽掉,如图
完整代码:
import torch
import matplotlib.pyplot as plt
# torch.manual_seed(1) # reproducible
N_SAMPLES = 20
N_HIDDEN = 300
# training data
x = torch.unsqueeze(torch.linspace(-1, 1, N_SAMPLES), 1)
y = x + 0.3*torch.normal(torch.zeros(N_SAMPLES, 1), torch.ones(N_SAMPLES, 1))
# test data
test_x = torch.unsqueeze(torch.linspace(-1, 1, N_SAMPLES), 1)
test_y = test_x + 0.3*torch.normal(torch.zeros(N_SAMPLES, 1), torch.ones(N_SAMPLES, 1))
# show data
plt.scatter(x.data.numpy(), y.data.numpy(), c='magenta', s=50, alpha=0.5, label='train')
plt.scatter(test_x.data.numpy(), test_y.data.numpy(), c='cyan', s=50, alpha=0.5, label='test')
plt.legend(loc='upper left')
plt.ylim((-2.5, 2.5))
plt.show()
net_overfitting = torch.nn.Sequential(
torch.nn.Linear(1, N_HIDDEN),
torch.nn.ReLU(),
torch.nn.Linear(N_HIDDEN, N_HIDDEN),
torch.nn.ReLU(),
torch.nn.Linear(N_HIDDEN, 1),
)
net_dropped = torch.nn.Sequential(
torch.nn.Linear(1, N_HIDDEN),
torch.nn.Dropout(0.5), # drop 50% of the neuron
torch.nn.ReLU(),
torch.nn.Linear(N_HIDDEN, N_HIDDEN),
torch.nn.Dropout(0.5), # drop 50% of the neuron
torch.nn.ReLU(),
torch.nn.Linear(N_HIDDEN, 1),
)
print(net_overfitting) # net architecture
print(net_dropped)
optimizer_ofit = torch.optim.Adam(net_overfitting.parameters(), lr=0.01)
optimizer_drop = torch.optim.Adam(net_dropped.parameters(), lr=0.01)
loss_func = torch.nn.MSELoss()
plt.ion() # something about plotting
for t in range(500):
pred_ofit = net_overfitting(x)
pred_drop = net_dropped(x)
loss_ofit = loss_func(pred_ofit, y)
loss_drop = loss_func(pred_drop, y)
optimizer_ofit.zero_grad()
optimizer_drop.zero_grad()
loss_ofit.backward()
loss_drop.backward()
optimizer_ofit.step()
optimizer_drop.step()
if t % 10 == 0:
# change to eval mode in order to fix drop out effect
net_overfitting.eval()
net_dropped.eval() # parameters for dropout differ from train mode
# plotting
plt.cla()
test_pred_ofit = net_overfitting(test_x)
test_pred_drop = net_dropped(test_x)
plt.scatter(x.data.numpy(), y.data.numpy(), c='magenta', s=50, alpha=0.3, label='train')
plt.scatter(test_x.data.numpy(), test_y.data.numpy(), c='cyan', s=50, alpha=0.3, label='test')
plt.plot(test_x.data.numpy(), test_pred_ofit.data.numpy(), 'r-', lw=3, label='overfitting')
plt.plot(test_x.data.numpy(), test_pred_drop.data.numpy(), 'b--', lw=3, label='dropout(50%)')
plt.text(0, -1.2, 'overfitting loss=%.4f' % loss_func(test_pred_ofit, test_y).data.numpy(), fontdict={'size': 20, 'color': 'red'})
plt.text(0, -1.5, 'dropout loss=%.4f' % loss_func(test_pred_drop, test_y).data.numpy(), fontdict={'size': 20, 'color': 'blue'})
plt.legend(loc='upper left'); plt.ylim((-2.5, 2.5));plt.pause(0.1)
# change back to train mode
net_overfitting.train()
net_dropped.train()
plt.ioff()
plt.show()
运行结果:

----------------------------------bach normalization-----------------------------------------------------
#############################################################################################################################################
每一个BN 都被添加在全连接层和激活函数之间
是处理数据的一种方式
对全连接层后输出的数据进行处理,避免数据分布在激活函数的无效区间,随着训练 神经网络会死掉
比如tanh激活函数
经过BN层处理数据以后,用BN拉回到(0,1) 这样就可以避免梯度爆炸和梯度消失
完整代码:
为了画图 代码不是很好理解
import torch
from torch import nn
from torch.nn import init
import torch.utils.data as Data
import matplotlib.pyplot as plt
import numpy as np
# torch.manual_seed(1) # reproducible
# np.random.seed(1)
# Hyper parameters
N_SAMPLES = 2000
BATCH_SIZE = 64
EPOCH = 12
LR = 0.03
N_HIDDEN = 8
ACTIVATION = torch.tanh
B_INIT = -0.2 # use a bad bias constant initializer
# training data
x = np.linspace(-7, 10, N_SAMPLES)[:, np.newaxis]
noise = np.random.normal(0, 2, x.shape)
y = np.square(x) - 5 + noise
# test data
test_x = np.linspace(-7, 10, 200)[:, np.newaxis]
noise = np.random.normal(0, 2, test_x.shape)
test_y = np.square(test_x) - 5 + noise
train_x, train_y = torch.from_numpy(x).float(), torch.from_numpy(y).float()
test_x = torch.from_numpy(test_x).float()
test_y = torch.from_numpy(test_y).float()
train_dataset = Data.TensorDataset(train_x, train_y)
train_loader = Data.DataLoader(dataset=train_dataset, batch_size=BATCH_SIZE, shuffle=True, num_workers=2,)
# show data
plt.scatter(train_x.numpy(), train_y.numpy(), c='#FF9359', s=50, alpha=0.2, label='train')
plt.legend(loc='upper left')
class Net(nn.Module):
def __init__(self, batch_normalization=False):
super(Net, self).__init__()
self.do_bn = batch_normalization
self.fcs = []
self.bns = []
self.bn_input = nn.BatchNorm1d(1, momentum=0.5) # for input data
for i in range(N_HIDDEN): # build hidden layers and BN layers
input_size = 1 if i == 0 else 10
fc = nn.Linear(input_size, 10)
setattr(self, 'fc%i' % i, fc) # IMPORTANT set layer to the Module
self._set_init(fc) # parameters initialization
self.fcs.append(fc)
if self.do_bn:
bn = nn.BatchNorm1d(10, momentum=0.5)
setattr(self, 'bn%i' % i, bn) # IMPORTANT set layer to the Module
self.bns.append(bn)
self.predict = nn.Linear(10, 1) # output layer
self._set_init(self.predict) # parameters initialization
def _set_init(self, layer):
init.normal_(layer.weight, mean=0., std=.1)
init.constant_(layer.bias, B_INIT)
def forward(self, x):
pre_activation = [x]
if self.do_bn: x = self.bn_input(x) # input batch normalization
layer_input = [x]
for i in range(N_HIDDEN):
x = self.fcs[i](x)
pre_activation.append(x)
if self.do_bn: x = self.bns[i](x) # batch normalization
x = ACTIVATION(x)
layer_input.append(x)
out = self.predict(x)
return out, layer_input, pre_activation
nets = [Net(batch_normalization=False), Net(batch_normalization=True)]
# print(*nets) # print net architecture
opts = [torch.optim.Adam(net.parameters(), lr=LR) for net in nets]
loss_func = torch.nn.MSELoss()
def plot_histogram(l_in, l_in_bn, pre_ac, pre_ac_bn):
for i, (ax_pa, ax_pa_bn, ax, ax_bn) in enumerate(zip(axs[0, :], axs[1, :], axs[2, :], axs[3, :])):
[a.clear() for a in [ax_pa, ax_pa_bn, ax, ax_bn]]
if i == 0:
p_range = (-7, 10);the_range = (-7, 10)
else:
p_range = (-4, 4);the_range = (-1, 1)
ax_pa.set_title('L' + str(i))
ax_pa.hist(pre_ac[i].data.numpy().ravel(), bins=10, range=p_range, color='#FF9359', alpha=0.5);ax_pa_bn.hist(pre_ac_bn[i].data.numpy().ravel(), bins=10, range=p_range, color='#74BCFF', alpha=0.5)
ax.hist(l_in[i].data.numpy().ravel(), bins=10, range=the_range, color='#FF9359');ax_bn.hist(l_in_bn[i].data.numpy().ravel(), bins=10, range=the_range, color='#74BCFF')
for a in [ax_pa, ax, ax_pa_bn, ax_bn]: a.set_yticks(());a.set_xticks(())
ax_pa_bn.set_xticks(p_range);ax_bn.set_xticks(the_range)
axs[0, 0].set_ylabel('PreAct');axs[1, 0].set_ylabel('BN PreAct');axs[2, 0].set_ylabel('Act');axs[3, 0].set_ylabel('BN Act')
plt.pause(0.01)
if __name__ == "__main__":
f, axs = plt.subplots(4, N_HIDDEN + 1, figsize=(10, 5))
plt.ion() # something about plotting
plt.show()
# training
losses = [[], []] # recode loss for two networks
for epoch in range(EPOCH):
print('Epoch: ', epoch)
layer_inputs, pre_acts = [], []
for net, l in zip(nets, losses):
net.eval() # set eval mode to fix moving_mean and moving_var
pred, layer_input, pre_act = net(test_x)
l.append(loss_func(pred, test_y).data.item())
layer_inputs.append(layer_input)
pre_acts.append(pre_act)
net.train() # free moving_mean and moving_var
plot_histogram(*layer_inputs, *pre_acts) # plot histogram
for step, (b_x, b_y) in enumerate(train_loader):
for net, opt in zip(nets, opts): # train for each network
pred, _, _ = net(b_x)
loss = loss_func(pred, b_y)
opt.zero_grad()
loss.backward()
opt.step() # it will also learns the parameters in Batch Normalization
plt.ioff()
# plot training loss
plt.figure(2)
plt.plot(losses[0], c='#FF9359', lw=3, label='Original')
plt.plot(losses[1], c='#74BCFF', lw=3, label='Batch Normalization')
plt.xlabel('step');plt.ylabel('test loss');plt.ylim((0, 2000));plt.legend(loc='best')
# evaluation
# set net to eval mode to freeze the parameters in batch normalization layers
[net.eval() for net in nets] # set eval mode to fix moving_mean and moving_var
preds = [net(test_x)[0] for net in nets]
plt.figure(3)
plt.plot(test_x.data.numpy(), preds[0].data.numpy(), c='#FF9359', lw=4, label='Original')
plt.plot(test_x.data.numpy(), preds[1].data.numpy(), c='#74BCFF', lw=4, label='Batch Normalization')
plt.scatter(test_x.data.numpy(), test_y.data.numpy(), c='r', s=50, alpha=0.2, label='train')
plt.legend(loc='best')
plt.show()
运行结果:
