基于Android studio3.6的三角剖分Delaunay之打包jar &调用jar
代码:
https://github.com/watersink/delaunator-jar-test
基本环境:
Android studio3.6
NDK:r15c(尽量使用该版本)
打包jar操作:
(1)File->New project->native c++->delaunator->c++11
(2)app/src/main/java/com/example/delaunator下面新建Delaunator
package com.example.delaunator;
public class Delaunator {
static {
System.loadLibrary("delaunator-jni");
}
public native int[] delaunator(float[] vertex);
}(3)MainActivity中的实现,
public class MainActivity extends AppCompatActivity {
// Used to load the 'native-lib' library on application startup.
private Delaunator delaunator = new Delaunator();
@Override
protected void onCreate(Bundle savedInstanceState) {
super.onCreate(savedInstanceState);
setContentView(R.layout.activity_main);
float[] vertex={(float)0.0, (float)0.0,(float)7, (float)1, (float)0,(float)7, (float)1, (float)1, (float)7, (float)0,(float)1, (float)7};
int[] index = delaunator.delaunator(vertex);
for (int i=0;i(4)app/src/main/cpp中添加delaunator.hpp类
#pragma once
#include
#include
//#include
//#include
#include
#include
//#include
#include
namespace delaunator {
//@see https://stackoverflow.com/questions/33333363/built-in-mod-vs-custom-mod-function-improve-the-performance-of-modulus-op/33333636#33333636
inline size_t fast_mod(const size_t i, const size_t c) {
return i >= c ? i % c : i;
}
// Kahan and Babuska summation, Neumaier variant; accumulates less FP error
inline float sum(const std::vector& x) {
float sum = x[0];
float err = 0.0;
for (size_t i = 1; i < x.size(); i++) {
const float k = x[i];
const float m = sum + k;
err += std::fabs(sum) >= std::fabs(k) ? sum - m + k : k - m + sum;
sum = m;
}
return sum + err;
}
inline float dist(
const float ax,
const float ay,
const float bx,
const float by) {
const float dx = ax - bx;
const float dy = ay - by;
return dx * dx + dy * dy;
}
inline float circumradius(
const float ax,
const float ay,
const float bx,
const float by,
const float cx,
const float cy) {
const float dx = bx - ax;
const float dy = by - ay;
const float ex = cx - ax;
const float ey = cy - ay;
const float bl = dx * dx + dy * dy;
const float cl = ex * ex + ey * ey;
const float d = dx * ey - dy * ex;
const float x = (ey * bl - dy * cl) * 0.5 / d;
const float y = (dx * cl - ex * bl) * 0.5 / d;
if ((bl > 0.0 || bl < 0.0) && (cl > 0.0 || cl < 0.0) && (d > 0.0 || d < 0.0)) {
return x * x + y * y;
} else {
return std::numeric_limits::max();
}
}
inline bool orient(
const float px,
const float py,
const float qx,
const float qy,
const float rx,
const float ry) {
return (qy - py) * (rx - qx) - (qx - px) * (ry - qy) < 0.0;
}
inline std::pair circumcenter(
const float ax,
const float ay,
const float bx,
const float by,
const float cx,
const float cy) {
const float dx = bx - ax;
const float dy = by - ay;
const float ex = cx - ax;
const float ey = cy - ay;
const float bl = dx * dx + dy * dy;
const float cl = ex * ex + ey * ey;
const float d = dx * ey - dy * ex;
const float x = ax + (ey * bl - dy * cl) * 0.5 / d;
const float y = ay + (dx * cl - ex * bl) * 0.5 / d;
return std::make_pair(x, y);
}
struct compare {
std::vector const& coords;
float cx;
float cy;
bool operator()(std::size_t i, std::size_t j) {
const float d1 = dist(coords[2 * i], coords[2 * i + 1], cx, cy);
const float d2 = dist(coords[2 * j], coords[2 * j + 1], cx, cy);
const float diff1 = d1 - d2;
const float diff2 = coords[2 * i] - coords[2 * j];
const float diff3 = coords[2 * i + 1] - coords[2 * j + 1];
if (diff1 > 0.0 || diff1 < 0.0) {
return diff1 < 0;
} else if (diff2 > 0.0 || diff2 < 0.0) {
return diff2 < 0;
} else {
return diff3 < 0;
}
}
};
inline bool in_circle(
const float ax,
const float ay,
const float bx,
const float by,
const float cx,
const float cy,
const float px,
const float py) {
const float dx = ax - px;
const float dy = ay - py;
const float ex = bx - px;
const float ey = by - py;
const float fx = cx - px;
const float fy = cy - py;
const float ap = dx * dx + dy * dy;
const float bp = ex * ex + ey * ey;
const float cp = fx * fx + fy * fy;
return (dx * (ey * cp - bp * fy) -
dy * (ex * cp - bp * fx) +
ap * (ex * fy - ey * fx)) < 0.0;
}
constexpr float EPSILON = std::numeric_limits::epsilon();
constexpr std::size_t INVALID_INDEX = std::numeric_limits::max();
inline bool check_pts_equal(float x1, float y1, float x2, float y2) {
return std::fabs(x1 - x2) <= EPSILON &&
std::fabs(y1 - y2) <= EPSILON;
}
// monotonically increases with real angle, but doesn't need expensive trigonometry
inline float pseudo_angle(const float dx, const float dy) {
const float p = dx / (std::abs(dx) + std::abs(dy));
return (dy > 0.0 ? 3.0 - p : 1.0 + p) / 4.0; // [0..1)
}
struct DelaunatorPoint {
std::size_t i;
float x;
float y;
std::size_t t;
std::size_t prev;
std::size_t next;
bool removed;
};
class Delaunator {
public:
//std::vector const& coords;
std::vector coords;
std::vector coords_3d;
std::vector triangles;
std::vector halfedges;
std::vector hull_prev;
std::vector hull_next;
std::vector hull_tri;
std::size_t hull_start;
Delaunator(std::vector const& in_coords);
float get_hull_area();
private:
std::vector m_hash;
float m_center_x;
float m_center_y;
std::size_t m_hash_size;
std::vector m_edge_stack;
std::size_t legalize(std::size_t a);
std::size_t hash_key(float x, float y) const;
std::size_t add_triangle(
std::size_t i0,
std::size_t i1,
std::size_t i2,
std::size_t a,
std::size_t b,
std::size_t c);
void link(std::size_t a, std::size_t b);
};
Delaunator::Delaunator(std::vector const& in_coords){
/*
: coords(in_coords),
triangles(),
halfedges(),
hull_prev(),
hull_next(),
hull_tri(),
hull_start(),
m_hash(),
m_center_x(),
m_center_y(),
m_hash_size(),
m_edge_stack() {*/
coords_3d.assign(in_coords.begin(), in_coords.end());
for (int i=0;i> 1;
float max_x = std::numeric_limits::min();
float max_y = std::numeric_limits::min();
float min_x = std::numeric_limits::max();
float min_y = std::numeric_limits::max();
std::vector ids;
ids.reserve(n);
for (std::size_t i = 0; i < n; i++) {
const float x = coords[2 * i];
const float y = coords[2 * i + 1];
if (x < min_x) min_x = x;
if (y < min_y) min_y = y;
if (x > max_x) max_x = x;
if (y > max_y) max_y = y;
ids.push_back(i);
}
const float cx = (min_x + max_x) / 2;
const float cy = (min_y + max_y) / 2;
float min_dist = std::numeric_limits::max();
std::size_t i0 = INVALID_INDEX;
std::size_t i1 = INVALID_INDEX;
std::size_t i2 = INVALID_INDEX;
// pick a seed point close to the centroid
for (std::size_t i = 0; i < n; i++) {
const float d = dist(cx, cy, coords[2 * i], coords[2 * i + 1]);
if (d < min_dist) {
i0 = i;
min_dist = d;
}
}
const float i0x = coords[2 * i0];
const float i0y = coords[2 * i0 + 1];
min_dist = std::numeric_limits::max();
// find the point closest to the seed
for (std::size_t i = 0; i < n; i++) {
if (i == i0) continue;
const float d = dist(i0x, i0y, coords[2 * i], coords[2 * i + 1]);
if (d < min_dist && d > 0.0) {
i1 = i;
min_dist = d;
}
}
float i1x = coords[2 * i1];
float i1y = coords[2 * i1 + 1];
float min_radius = std::numeric_limits::max();
// find the third point which forms the smallest circumcircle with the first two
for (std::size_t i = 0; i < n; i++) {
if (i == i0 || i == i1) continue;
const float r = circumradius(
i0x, i0y, i1x, i1y, coords[2 * i], coords[2 * i + 1]);
if (r < min_radius) {
i2 = i;
min_radius = r;
}
}
if (!(min_radius < std::numeric_limits::max())) {
throw std::runtime_error("not triangulation");
}
float i2x = coords[2 * i2];
float i2y = coords[2 * i2 + 1];
if (orient(i0x, i0y, i1x, i1y, i2x, i2y)) {
std::swap(i1, i2);
std::swap(i1x, i2x);
std::swap(i1y, i2y);
}
std::tie(m_center_x, m_center_y) = circumcenter(i0x, i0y, i1x, i1y, i2x, i2y);
// sort the points by distance from the seed triangle circumcenter
std::sort(ids.begin(), ids.end(), compare{ coords, m_center_x, m_center_y });
// initialize a hash table for storing edges of the advancing convex hull
m_hash_size = static_cast(llround(std::ceil(std::sqrt(n))));
m_hash.resize(m_hash_size);
std::fill(m_hash.begin(), m_hash.end(), INVALID_INDEX);
// initialize arrays for tracking the edges of the advancing convex hull
hull_prev.resize(n);
hull_next.resize(n);
hull_tri.resize(n);
hull_start = i0;
size_t hull_size = 3;
hull_next[i0] = hull_prev[i2] = i1;
hull_next[i1] = hull_prev[i0] = i2;
hull_next[i2] = hull_prev[i1] = i0;
hull_tri[i0] = 0;
hull_tri[i1] = 1;
hull_tri[i2] = 2;
m_hash[hash_key(i0x, i0y)] = i0;
m_hash[hash_key(i1x, i1y)] = i1;
m_hash[hash_key(i2x, i2y)] = i2;
std::size_t max_triangles = n < 3 ? 1 : 2 * n - 5;
triangles.reserve(max_triangles * 3);
halfedges.reserve(max_triangles * 3);
add_triangle(i0, i1, i2, INVALID_INDEX, INVALID_INDEX, INVALID_INDEX);
float xp = std::numeric_limits::quiet_NaN();
float yp = std::numeric_limits::quiet_NaN();
for (std::size_t k = 0; k < n; k++) {
const std::size_t i = ids[k];
const float x = coords[2 * i];
const float y = coords[2 * i + 1];
// skip near-duplicate points
if (k > 0 && check_pts_equal(x, y, xp, yp)) continue;
xp = x;
yp = y;
// skip seed triangle points
if (
check_pts_equal(x, y, i0x, i0y) ||
check_pts_equal(x, y, i1x, i1y) ||
check_pts_equal(x, y, i2x, i2y)) continue;
// find a visible edge on the convex hull using edge hash
std::size_t start = 0;
size_t key = hash_key(x, y);
for (size_t j = 0; j < m_hash_size; j++) {
start = m_hash[fast_mod(key + j, m_hash_size)];
if (start != INVALID_INDEX && start != hull_next[start]) break;
}
start = hull_prev[start];
size_t e = start;
size_t q;
while (q = hull_next[e], !orient(x, y, coords[2 * e], coords[2 * e + 1], coords[2 * q], coords[2 * q + 1])) { //TODO: does it works in a same way as in JS
e = q;
if (e == start) {
e = INVALID_INDEX;
break;
}
}
if (e == INVALID_INDEX) continue; // likely a near-duplicate point; skip it
// add the first triangle from the point
std::size_t t = add_triangle(
e,
i,
hull_next[e],
INVALID_INDEX,
INVALID_INDEX,
hull_tri[e]);
hull_tri[i] = legalize(t + 2);
hull_tri[e] = t;
hull_size++;
// walk forward through the hull, adding more triangles and flipping recursively
std::size_t next = hull_next[e];
while (
q = hull_next[next],
orient(x, y, coords[2 * next], coords[2 * next + 1], coords[2 * q], coords[2 * q + 1])) {
t = add_triangle(next, i, q, hull_tri[i], INVALID_INDEX, hull_tri[next]);
hull_tri[i] = legalize(t + 2);
hull_next[next] = next; // mark as removed
hull_size--;
next = q;
}
// walk backward from the other side, adding more triangles and flipping
if (e == start) {
while (
q = hull_prev[e],
orient(x, y, coords[2 * q], coords[2 * q + 1], coords[2 * e], coords[2 * e + 1])) {
t = add_triangle(q, i, e, INVALID_INDEX, hull_tri[e], hull_tri[q]);
legalize(t + 2);
hull_tri[q] = t;
hull_next[e] = e; // mark as removed
hull_size--;
e = q;
}
}
// update the hull indices
hull_prev[i] = e;
hull_start = e;
hull_prev[next] = i;
hull_next[e] = i;
hull_next[i] = next;
m_hash[hash_key(x, y)] = i;
m_hash[hash_key(coords[2 * e], coords[2 * e + 1])] = e;
}
}
float Delaunator::get_hull_area() {
std::vector hull_area;
size_t e = hull_start;
do {
hull_area.push_back((coords[2 * e] - coords[2 * hull_prev[e]]) * (coords[2 * e + 1] + coords[2 * hull_prev[e] + 1]));
e = hull_next[e];
} while (e != hull_start);
return sum(hull_area);
}
std::size_t Delaunator::legalize(std::size_t a) {
std::size_t i = 0;
std::size_t ar = 0;
m_edge_stack.clear();
// recursion eliminated with a fixed-size stack
while (true) {
const size_t b = halfedges[a];
/* if the pair of triangles doesn't satisfy the Delaunay condition
* (p1 is inside the circumcircle of [p0, pl, pr]), flip them,
* then do the same check/flip recursively for the new pair of triangles
*
* pl pl
* /||\ / \
* al/ || \bl al/ \a
* / || \ / \
* / a||b \ flip /___ar___\
* p0\ || /p1 => p0\---bl---/p1
* \ || / \ /
* ar\ || /br b\ /br
* \||/ \ /
* pr pr
*/
const size_t a0 = 3 * (a / 3);
ar = a0 + (a + 2) % 3;
if (b == INVALID_INDEX) {
if (i > 0) {
i--;
a = m_edge_stack[i];
continue;
} else {
//i = INVALID_INDEX;
break;
}
}
const size_t b0 = 3 * (b / 3);
const size_t al = a0 + (a + 1) % 3;
const size_t bl = b0 + (b + 2) % 3;
const std::size_t p0 = triangles[ar];
const std::size_t pr = triangles[a];
const std::size_t pl = triangles[al];
const std::size_t p1 = triangles[bl];
const bool illegal = in_circle(
coords[2 * p0],
coords[2 * p0 + 1],
coords[2 * pr],
coords[2 * pr + 1],
coords[2 * pl],
coords[2 * pl + 1],
coords[2 * p1],
coords[2 * p1 + 1]);
if (illegal) {
triangles[a] = p1;
triangles[b] = p0;
auto hbl = halfedges[bl];
// edge swapped on the other side of the hull (rare); fix the halfedge reference
if (hbl == INVALID_INDEX) {
std::size_t e = hull_start;
do {
if (hull_tri[e] == bl) {
hull_tri[e] = a;
break;
}
e = hull_next[e];
} while (e != hull_start);
}
link(a, hbl);
link(b, halfedges[ar]);
link(ar, bl);
std::size_t br = b0 + (b + 1) % 3;
if (i < m_edge_stack.size()) {
m_edge_stack[i] = br;
} else {
m_edge_stack.push_back(br);
}
i++;
} else {
if (i > 0) {
i--;
a = m_edge_stack[i];
continue;
} else {
break;
}
}
}
return ar;
}
inline std::size_t Delaunator::hash_key(const float x, const float y) const {
const float dx = x - m_center_x;
const float dy = y - m_center_y;
return fast_mod(
static_cast(llround(std::floor(pseudo_angle(dx, dy) * static_cast(m_hash_size)))),
m_hash_size);
}
std::size_t Delaunator::add_triangle(
std::size_t i0,
std::size_t i1,
std::size_t i2,
std::size_t a,
std::size_t b,
std::size_t c) {
std::size_t t = triangles.size();
triangles.push_back(i0);
triangles.push_back(i1);
triangles.push_back(i2);
link(t, a);
link(t + 1, b);
link(t + 2, c);
return t;
}
void Delaunator::link(const std::size_t a, const std::size_t b) {
std::size_t s = halfedges.size();
if (a == s) {
halfedges.push_back(b);
} else if (a < s) {
halfedges[a] = b;
} else {
throw std::runtime_error("Cannot link edge");
}
if (b != INVALID_INDEX) {
std::size_t s2 = halfedges.size();
if (b == s2) {
halfedges.push_back(a);
} else if (b < s2) {
halfedges[b] = a;
} else {
throw std::runtime_error("Cannot link edge");
}
}
}
} //namespace delaunator (5)app/src/main/cpp中添加delaunator-jni.cpp
extern "C"
JNIEXPORT jintArray JNICALL
Java_com_example_delaunator_Delaunator_delaunator(JNIEnv *env, jobject thiz, jfloatArray vertex) {
// TODO: implement delaunator()
std::vector coords;
jfloat* float_elems = env->GetFloatArrayElements(vertex, 0);
for (jsize index=0; indexGetArrayLength(vertex);index++) {
coords.push_back(float_elems[index]);
}
//triangulation happens here
delaunator::Delaunator d(coords);
int *buffer = new int[d.triangles.size()];
if (!d.triangles.empty())
{
memcpy(buffer, &d.triangles[0], d.triangles.size()*sizeof(int));
}
jintArray jOutputData = env->NewIntArray(d.triangles.size());
env->SetIntArrayRegion(jOutputData, 0, d.triangles.size(), buffer);
delete []buffer;
if (jOutputData == nullptr) return nullptr;
return jOutputData;
} (6)修改CMakeLists.txt
cmake_minimum_required(VERSION 3.4.1)
# Debug版本添加日志库,Release版本不添加日志库,并隐藏符号,并导出符号表
if (${CMAKE_BUILD_TYPE} MATCHES "Debug")
list(APPEND libraries ${log-lib})
add_definitions("-DLOG_OPEN")
else ()
set(CMAKE_CXX_VISIBILITY_PRESET hidden)
set(CMAKE_C_VISIBILITY_PRESET hidden)
set(CMAKE_CXX_FLAGS "${CMAKE_CXX_FLAGS} -fvisibility=hidden")
set(CMAKE_C_FLAGS "${CMAKE_C_FLAGS} -fvisibility=hidden")
set(CMAKE_SHARED_LINKER_FLAGS "${CMAKE_SHARED_LINKER_FLAGS} -Wl,-Map=output.map" CACHE INTERNAL "")
endif ()
add_library( # Sets the name of the library.
delaunator-jni
# Sets the library as a shared library.
SHARED
# Provides a relative path to your source file(s).
delaunator-jni.cpp)
find_library( # Sets the name of the path variable.
log-lib
# Specifies the name of the NDK library that
# you want CMake to locate.
log )
target_link_libraries( # Specifies the target library.
delaunator-jni
# Links the target library to the log library
# included in the NDK.
${log-lib} )(7)修改app/build.gradle
修改apply plugin: 'com.android.application'为apply plugin: 'com.android.library'
将applicationId "com.example.delaunator"注释掉
增加编译的优化设置,可以模型加密,输出更快,更小的so,
externalNativeBuild {
cmake {
arguments "-DANDROID_TOOLCHAIN=clang"
cFlags "-fopenmp -O2 -fvisibility=hidden -fomit-frame-pointer -fstrict-aliasing -ffunction-sections -fdata-sections -ffast-math "
cppFlags "-fopenmp -O2 -fvisibility=hidden -fvisibility-inlines-hidden -fomit-frame-pointer -fstrict-aliasing -ffunction-sections -fdata-sections -ffast-math "
arguments "-DANDROID_STL=c++_shared", "-DANDROID_CPP_FEATURES=rtti exceptions"
cppFlags ""
cppFlags "-std=c++11"
cppFlags "-frtti"
cppFlags "-fexceptions"
}
}
ndk {
abiFilters 'armeabi-v7a'// , 'arm64-v8a' //,'x86', 'x86_64', 'armeabi'
stl "gnustl_static"
}增加makejar设置,
task makeJar(type: Copy) {
def SDK_NAME = "Delaunator"; //sdk的名字
def SDK_VERSION = "_V1.0"; //版本
def sdkDestinationPath = "build";
delete sdkDestinationPath + SDK_NAME + SDK_VERSION + ".jar"
from('build/intermediates/aar_main_jar/release/')//从该目录下加载要打包的文件
from fileTree(dir: 'build/intermediates/merged_native_libs/release/out/lib',includes: ['**'])//打包模型文件,so文件
into('build/libs/')//jar包的保存目录
//include('classes.jar')//设置过滤,只打包classes文件
rename('classes.jar', SDK_NAME + SDK_VERSION + ".jar")//重命名,mylibrary.jar 根据自己的需求设置
}
makeJar.dependsOn(build)(8)IDE的右侧,项目名称/Tasks/other/下面双击makeJar,然后可以在build/libs下面生成打包文件,

调用jar操作:
(1)File->New project->Empty Activity->My Application->Finish
(2)将生成的so和jar包拷贝到libs文件夹下面
(3)File->Project Structure->Dependencies->app->+->jar dependency,添加我们的Delaunator_V1.0.jar
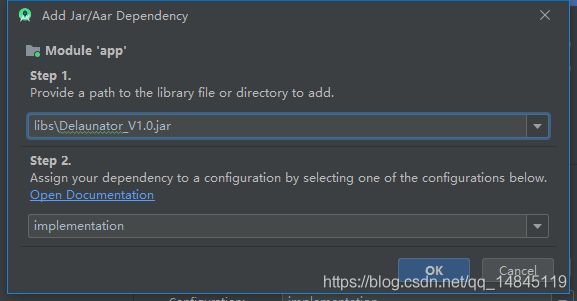
完成后,会在app/build.gradle下面dependencies中增加该jar包的引用
implementation files('libs\\Delaunator_V1.0.jar')
app/build.gradle里面增加,再buildTypes增加,保证可以照到so文件,
sourceSets {
main {
jniLibs.srcDirs = ['libs']//将so文件目录指向libs目录
}
}(4)MainActivity里面添加实现,
import com.example.delaunator.Delaunator;
public class MainActivity extends AppCompatActivity {
@Override
protected void onCreate(Bundle savedInstanceState) {
super.onCreate(savedInstanceState);
setContentView(R.layout.activity_main);
float[] vertex={(float)0.0, (float)0.0,(float)7, (float)1, (float)0,(float)7, (float)1, (float)1, (float)7, (float)0,(float)1, (float)7};
int[] index = new Delaunator().delaunator(vertex);
for (int i=0;i(5)运行后,Logcat下面的输出可以看到结果,