STM32F407 USART串口通信介绍(普中开发板)
声明:文章部分图片引自网络,如若侵权立即删帖致歉
USART与UART
USART全称为同步异步收发器,而UART仅仅为异步收发器
全双工,半双工,单工
全双工:就像我们现在用的手机电话,我既能听到你的声音,还能在听到声音的时候说话
半双工:对讲机,你说话我只能听,我说话你只能听
单工:我能说话你不能说话,你只能听,设定好了永远就只能听,不可能说话(这里面的说话与否对应着数据传输)
RS232
串口通信有很多接口标准
RS-232C有DB25和DB9这两种,分别对应25针和9针,目前使用最多的是9针,连接器的每个插针排列方式都有明确的定义,公头和母头的定义顺序是不一样的
1、TXD RXD数据线上
逻辑1的电平为-3~-15V
逻辑0的电平为3~15V 可见与我们平时所见到的TTL电平是相反的
2、在RTS、CTS、DSR、DTR、DCD等控制线上
信号有效为3~15V
信号无效为-3~-15V
3、两个通信设备之间要共地,发送口对接收口,接收口对发送口
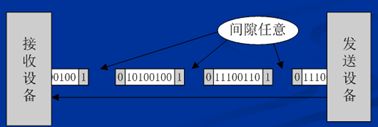
异步通信
异步通信是以字符(构成的帧)进行传输的,字符与字符之间的间隔是任意的,即每个帧之间相隔多少时间传输我们是不管的,但是字符内部,各个位是以固定的时间传送的
总的来说异步通信简单开销小,但是传输效率低
串口通信库函数配置
1、首先串口是在GPIO上的,所以我们得开启对应的GPIO和USART时钟
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOA,ENABLE); //使能GPIOA时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1,ENABLE);//使能USART1时钟
2、接下来是配置GPIO的复用功能
GPIO_PinAFConfig(GPIOA,GPIO_PinSource9,GPIO_AF_USART1); //GPIOA9复用为USART1
GPIO_PinAFConfig(GPIOA,GPIO_PinSource10,GPIO_AF_USART1); //GPIOA10复用为USART1
3、初始化串口参数,包含波特率、字长、奇偶校验等参数
void USART_Init(USART_TypeDef* USARTx, USART_InitTypeDef*
USART_InitStruct);
typedef struct
{
uint32_t USART_BaudRate; //波特率
uint16_t USART_WordLength; //字长
uint16_t USART_StopBits; //停止位
uint16_t USART_Parity; //校验位
uint16_t USART_Mode; //USART模式
uint16_t USART_HardwareFlowControl; //硬件流控制
} USART_InitTypeDef;
4、同时不要忘记对GPIO的初始化+使能和USART的使能(GPIO初始化记得选复用模式)
综合库函数配置代码如下:
#include "usart.h"
/*******************************************************************************
* 函 数 名 : USART1_Init
* 函数功能 : USART1初始化函数
* 输 入 : bound:波特率
* 输 出 : 无
*******************************************************************************/
void USART1_Init(u32 bound)
{
//GPIO端口设置
GPIO_InitTypeDef GPIO_InitStructure;
USART_InitTypeDef USART_InitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOA,ENABLE); //使能GPIOA时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1,ENABLE);//使能USART1时钟
//串口1对应引脚复用映射
GPIO_PinAFConfig(GPIOA,GPIO_PinSource9,GPIO_AF_USART1); //GPIOA9复用为USART1
GPIO_PinAFConfig(GPIOA,GPIO_PinSource10,GPIO_AF_USART1); //GPIOA10复用为USART1
//USART1端口配置
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9|GPIO_Pin_10 ; //GPIOA9与GPIOA10
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF;//复用功能
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //速度50MHz
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP; //推挽复用输出
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP; //上拉
GPIO_Init(GPIOA,&GPIO_InitStructure); //初始化PA9,PA10
//USART1 初始化设置
USART_InitStructure.USART_BaudRate = bound;//波特率设置
USART_InitStructure.USART_WordLength = USART_WordLength_8b;//字长为8位数据格式
USART_InitStructure.USART_StopBits = USART_StopBits_1;//一个停止位
USART_InitStructure.USART_Parity = USART_Parity_No;//无奇偶校验位
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;//无硬件数据流控制
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx; //收发模式
USART_Init(USART1, &USART_InitStructure); //初始化串口1
USART_Cmd(USART1, ENABLE); //使能串口1
USART_ClearFlag(USART1, USART_FLAG_TC);
USART_ITConfig(USART1, USART_IT_RXNE, ENABLE);//开启相关中断//开启的是接收完成中断
//Usart1 NVIC 配置
NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn;//串口1中断通道
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=3;//抢占优先级3
NVIC_InitStructure.NVIC_IRQChannelSubPriority =3; //子优先级3
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQ通道使能
NVIC_Init(&NVIC_InitStructure); //根据指定的参数初始化VIC寄存器、
}
/*******************************************************************************
* 函 数 名 : USART1_IRQHandler
* 函数功能 : USART1中断函数
* 输 入 : 无
* 输 出 : 无
*******************************************************************************/
void USART1_IRQHandler(void) //串口1中断服务程序
{
u8 r;
if(USART_GetITStatus(USART1, USART_IT_RXNE) != RESET) //接收中断
{
r =USART_ReceiveData(USART1);//(USART1->DR); //读取接收到的数据
USART_SendData(USART1,r);
while(USART_GetFlagStatus(USART1,USART_FLAG_TC) != SET);
}
USART_ClearFlag(USART1,USART_FLAG_TC);
}