Adam那么棒,为什么还对SGD念念不忘 (1)
“ 说到优化算法,入门级必从 SGD 学起,老司机则会告诉你更好的还有AdaGrad / AdaDelta,或者直接无脑用 Adam。可是看看学术界的最新 paper,却发现一众大神还在用着入门级的 SGD,最多加个 Momentum 或者 Nesterov,还经常会黑一下 Adam。这是为什么呢?”
机器学习界有一群炼丹师,他们每天的日常是:
拿来药材(数据),架起八卦炉(模型),点着六味真火(优化算法),就摇着蒲扇等着丹药出炉了。
不过,当过厨子的都知道,同样的食材,同样的菜谱,但火候不一样了,这出来的口味可是千差万别。火小了夹生,火大了易糊,火不匀则半生半糊。
机器学习也是一样,模型优化算法的选择直接关系到最终模型的性能。有时候效果不好,未必是特征的问题或者模型设计的问题,很可能就是优化算法的问题。
说到优化算法,入门级必从 SGD 学起,老司机则会告诉你更好的还有 AdaGrad / AdaDelta,或者直接无脑用 Adam。可是看看学术界的最新 paper,却发现一众大神还在用着入门级的 SGD,最多加个 Momentum 或者 Nesterov,还经常会黑一下Adam。比如 UC Berkeley 的一篇论文就在 Conclusion 中写道:
Despite the fact that our experimental evidence demonstrates that adaptive methods are not advantageous for machine learning, the Adam algorithm remains incredibly popular. We are not sure exactly as to why ……
无奈与酸楚之情溢于言表。
这是为什么呢?难道平平淡淡才是真?
01 一个框架回顾优化算法
首先我们来回顾一下各类优化算法。
深度学习优化算法经历了 SGD -> SGDM -> NAG ->AdaGrad -> AdaDelta -> Adam -> Nadam 这样的发展历程。Google一下就可以看到很多的教程文章,详细告诉你这些算法是如何一步一步演变而来的。在这里,我们换一个思路,用一个框架来梳理所有的优化算法,做一个更加高屋建瓴的对比。
优化算法通用框架
首先定义:待优化参数:w ,目标函数: f(w),初始学习率 α。
而后,开始进行迭代优化。在每个epoch t:
-
计算目标函数关于当前参数的梯度:
-
根据历史梯度计算一阶动量和二阶动量:


-
计算当前时刻的下降梯度:

-
根据下降梯度进行更新:
掌握了这个框架,你可以轻轻松松设计自己的优化算法。
我们拿着这个框架,来照一照各种玄乎其玄的优化算法的真身。步骤3、4对于各个算法都是一致的,主要的差别就体现在1和2上。
02 固定学习率的优化算法
SGD
先来看SGD。SGD没有动量的概念,也就是说:

代入步骤3,可以看到下降梯度就是最简单的

SGD最大的缺点是下降速度慢,而且可能会在沟壑的两边持续震荡,停留在一个局部最优点。
SGD with Momentum
为了抑制SGD的震荡,SGDM认为梯度下降过程可以加入惯性。下坡的时候,如果发现是陡坡,那就利用惯性跑的快一些。SGDM全称是SGD with momentum,在SGD基础上引入了一阶动量:

一阶动量是各个时刻梯度方向的指数移动平均值,约等于最近 1/(1-β1) 个时刻的梯度向量和的平均值。
也就是说,t 时刻的下降方向,不仅由当前点的梯度方向决定,而且由此前累积的下降方向决定。β1的经验值为0.9,这就意味着下降方向主要是此前累积的下降方向,并略微偏向当前时刻的下降方向。想象高速公路上汽车转弯,在高速向前的同时略微偏向,急转弯可是要出事的。
SGD with Nesterov Acceleration
SGD 还有一个问题是困在局部最优的沟壑里面震荡。想象一下你走到一个盆地,四周都是略高的小山,你觉得没有下坡的方向,那就只能待在这里了。可是如果你爬上高地,就会发现外面的世界还很广阔。因此,我们不能停留在当前位置去观察未来的方向,而要向前一步、多看一步、看远一些。
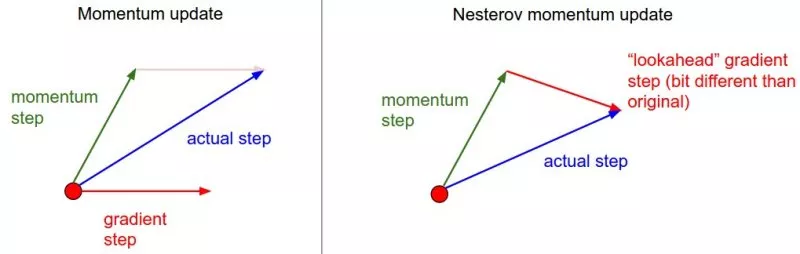
(source: http://cs231n.github.io/neural-networks-3)
这一方法也称为NAG,即 Nesterov Accelerated Gradient,是在SGD、SGD-M 的基础上的进一步改进,改进点在于步骤 1。我们知道在时刻 t 的主要下降方向是由累积动量决定的,自己的梯度方向说了也不算,那与其看当前梯度方向,不如先看看如果跟着累积动量走了一步,那个时候再怎么走。因此,NAG在步骤 1,不计算当前位置的梯度方向,而是计算如果按照累积动量走了一步,那个时候的下降方向:

然后用下一个点的梯度方向,与历史累积动量相结合,计算步骤 2 中当前时刻的累积动量。

03-自适应学习率的优化算法
此前我们都没有用到二阶动量。二阶动量的出现,才意味着“自适应学习率”优化算法时代的到来。SGD及其变种以同样的学习率更新每个参数,但深度神经网络往往包含大量的参数,这些参数并不是总会用得到(想想大规模的embedding)。对于经常更新的参数,我们已经积累了大量关于它的知识,不希望被单个样本影响太大,希望学习速率慢一些;对于偶尔更新的参数,我们了解的信息太少,希望能从每个偶然出现的样本身上多学一些,即学习速率大一些。
AdaGrad
怎么样去度量历史更新频率呢?那就是二阶动量——该维度上,迄今为止所有梯度值的平方和:
我们再回顾一下步骤3中的下降梯度:

可以看出,此时实质上的学习率由![]() 变成了
变成了 。 一般为了避免分母为0,会在分母上加一个小的平滑项。因此
。 一般为了避免分母为0,会在分母上加一个小的平滑项。因此 是恒大于0的,而且参数更新越频繁,二阶动量越大,学习率就越小。
是恒大于0的,而且参数更新越频繁,二阶动量越大,学习率就越小。
这一方法在稀疏数据场景下表现非常好。但也存在一些问题:因为是单调递增的,会使得学习率单调递减至0,可能会使得训练过程提前结束,即便后续还有数据也无法学到必要的知识。
AdaDelta / RMSProp
由于AdaGrad单调递减的学习率变化过于激进,我们考虑一个改变二阶动量计算方法的策略:不累积全部历史梯度,而只关注过去一段时间窗口的下降梯度。这也就是AdaDelta名称中Delta的来历。
修改的思路很简单。前面我们讲到,指数移动平均值大约就是过去一段时间的平均值,因此我们用这一方法来计算二阶累积动量:

这就避免了二阶动量持续累积、导致训练过程提前结束的问题了。
Adam
谈到这里,Adam和Nadam的出现就很自然而然了——它们是前述方法的集大成者。我们看到,SGD-M在SGD基础上增加了一阶动量,AdaGrad和AdaDelta在SGD基础上增加了二阶动量。把一阶动量和二阶动量都用起来,就是Adam了——Adaptive + Momentum。
SGD的一阶动量:

加上AdaDelta的二阶动量:

优化算法里最常见的两个超参数 就都在这里了,前者控制一阶动量,后者控制二阶动量。
就都在这里了,前者控制一阶动量,后者控制二阶动量。
Nadam
最后是Nadam。我们说Adam是集大成者,但它居然遗漏了Nesterov,这还能忍?必须给它加上——只需要按照NAG的步骤1来计算梯度:
这就是Nesterov + Adam = Nadam了。
说到这里,大概可以理解为什么说 Adam / Nadam 目前最主流、最好用的算法了。无脑用Adam/Nadam,收敛速度嗖嗖滴,效果也是杠杠滴。
那为什么Adam还老招人黑,被学术界一顿鄙夷?难道只是为了发paper灌水吗?
且听下回分解。