二分图的最大匹配——匈牙利算法
二分图
简单来说,如果图中点可以被分为两组,并且使得所有边都跨越组的边界,则这就是一个二分图。
也就是说,把一个图的顶点划分为两个不相交集 X 和 Y ,使得每一条边都分别连接 X 、 Y 中的顶点。如果存在这样的划分,则此图为一个二分图。
二分图的一个等价定义是:不含有「奇数条边的环」的图。

图 1 不含有「奇数条边的环」我们习惯上将其画成下列形式:

可以看到图 2 中每条边的两个端点属于不同的集合,这样的图就是一个二分图。
(并且我们人为约定,左边的点属于 X 集合,右边的点属于 Y 集合)
匹配:在图论中,一个「匹配」(matching)是一个边的集合,其中任意两条边都没有公共顶点。
例如,图 3 、图 4 中红色的边就是图 2 的匹配。

二分图的匹配
我们定义匹配点、匹配边、未匹配点、非匹配边,它们的含义非常显然。例如图 3 中 1、4、5、7 为匹配点,其他顶点为未匹配点。 1−5、4−7 为匹配边,其他边为非匹配边。
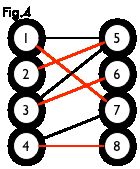
- 最大匹配:一个图所有匹配中,所含匹配边数最多的匹配,称为这个图的最大匹配。图 4 是一个最大匹配,它包含 4 条匹配边。
- 完美匹配:如果一个图的某个匹配中,所有的顶点都是匹配点,那么它就是一个完美匹配。
图 4 是一个完美匹配。显然,完美匹配一定是最大匹配(完美匹配的任何一个点都已经匹配,添加一条新的匹配边一定会与已有的匹配边冲突)。但并非每个图都存在完美匹配。
这两个概念应该十分明确,举例来说:如下图所示,如果在某一对男孩和女孩之间存在相连的边,就意味着他们彼此喜欢。
是否可能让所有男孩和女孩两两配对,使得每对儿都互相喜欢呢?图论中,这就是完美匹配问题。
如果换一个说法:最多有多少互相喜欢的男孩/女孩可以配对儿?这就是最大匹配问题。

匈牙利算法
二分图的最大匹配可以转换为一个网络流的问题,但是我们一般使用匈牙利算法,这种算法更易于理解,方便编写。
介绍这个算法之前,首先要介绍一些必要的概念。
交错路 : 从一个未匹配点出发,依次遍历未匹配边、匹配边、未匹配边,这样交替下去,这条路径称为交错路。
增广路 : 从一个未匹配点出发,依次遍历未匹配边、匹配边、未匹配边,这样交替下去,如果最后一个点是未匹配点,这条路径称为增广路。换句话说,起点和终点都为未匹配点的交错路为增广路(特别提醒,这里的增广路和网络流中的增广路的意义不同)


如图所示,图 6 是图 5 的其中一条增广路,可以看出由未匹配点 9 出发,依次沿着边 edge(9,4)−>edge(4,8)−>edge(8,1)−>edge(1,6)−>edge(6,1) 到达未匹配点 1 ,显然,这是一条增广路。
观察图 6 我们可发现增广路的一些特点。
增广路一定有奇数条边。
增广路中未匹配边一定比匹配边多一条(因为是从未匹配点出发走交错路到未匹配点结束)
这里其实就表明了研究增广路的意义。
如果找到了一条增广路,那么将未匹配点与匹配边的身份调换,那么匹配的边数就多了一条,这样直到找不到增广路为止,那么整个图的匹配的边数一定最大,也就是找到了二分图的最大匹配。
这里的身份调换是指 :
原来匹配的边为 edge(1,6),edge(4,8) ,匹配边数为 2 。找到一条增广路(这里不一定从 9 开始找,任何一个未匹配点都可以)后,现在匹配的边为 edge(2,6),edge(1,8),edge(4,9) ,匹配边数为 3 。
匈牙利算法正是利用了增广路的这个性质,从 X 集合中找到一个未匹配点,寻找增广路,找到了匹配数+1,如果没有找到,那么从 X 中找到下一个未匹配的点,再次寻找增广路……重复上述过程,直到 X 集合中的所有节点都被“增广”完毕,无论如何都找不到增广路,那么整个图的匹配数就最大了。
下面给出匈牙利算法的伪代码 :
void hungary()//匈牙利算法
{
for i->1 to nx//对于集合X中的每一个节点
if (从未匹配点i出发有增广路)
匹配数++;
输出 匹配数;
}
bool findpath(x)//寻找从x出发的对应项出的可增广路
{
//crossPath[x] = true;这条语句可能会有很多人加上,但是实际上crossPtah总是记录集合Y中的节点是否在交错路上
for each edge(x,y) in G.E
{
if(y is not in crossPath)
{
add y into crossPath
lastX = match[y];//lastX是X集合的上一个与y匹配的节点
if(y is not matched or findpath(lastX))//如果y已经被了,那么试试从lastX能不能另外找到一条增广路,把当前增广路让给现在的x
{
match[y] = x;
//match[x] = y,wrong !
return true;//从x出发有增广路
}
}
}
return false;//从x出发没有增广路
}
时间复杂度 : 对于每一个属于集合X的节点x,调用 findpath(x) ,最坏情况下 findpath(x) 会遍历所有的边,所以该事件复杂度为 O(V*E)。
推荐两个模板题目 :
hdu 2063
poj 1469
并且给出hdu 2063当做模板 :
#include 推荐几个经典的例题,做完之后差不多就入门了 :
poj 1274 (基础)
poj 2446 (建图特殊)
hdu 1281 (建图特殊)
hdu 2819 (难)
二分图最大匹配的扩展
最大独立集 : 二分图中最大的一个点集,该点集内的点互不相连(没有边相连)。回想一下图 4 :
 显然这里给出了图的一个最大匹配,将最大匹配中的点从原来的节点集合 V 中删除,那么剩下的点不会有任何边相连,也就是说最大独立集数目=|V|−最大匹配数
显然这里给出了图的一个最大匹配,将最大匹配中的点从原来的节点集合 V 中删除,那么剩下的点不会有任何边相连,也就是说最大独立集数目=|V|−最大匹配数最小顶点覆盖 :二分图中,用最少的点,让所有的边至少和一个点有关联。很显然,最大匹配中的结点满足该性质,也就是说
最小顶点覆盖数=最大匹配数最小路径覆盖:在有向图中找一些路径,这些路径覆盖图中所有的顶点,每个顶点都只与一条路径相关联。在所有的路径覆盖中,路径个数最小的就是最小路径覆盖。
最小路径覆盖=最大独立集=|V|−最大匹配
以上三条的正确性都不予证明…证明也会是很数学的东西,当做结论记起来就好。
练习题目 :
poj 2060
poj 3041
poj 2226
本文图片摘自