MATLAB-Robot(0):MATLAB Robotics Toolbox机器人仿真基础基础
一:基本变换
1. 平移: T=transl(0.5,0,0)%分别沿着xyz轴的平移
>> T=transl(0.5,0,0) %x方向平移0.5个单位长度
T =
1.0000 0 0 0.5000
0 1.0000 0 0
0 0 1.0000 0
0 0 0 1.00002.旋转:
(1)得到3x3阶矩阵: rotx(a) roty(b) rotz(c)%分别绕xyz轴的旋转
>> T = roty(pi/2)
T =
0.9996 0 0.0274
0 1.0000 0
-0.0274 0 0.9996
(2)得到4x4阶矩阵:trotx(a) troty(b) trotz(c)%分别绕xyz轴的旋转
>> trotx(pi/2)
ans =
1.0000 0 0 0
0 0.9996 -0.0274 0
0 0.0274 0.9996 0
0 0 0 1.00003.复合变换: 平移加旋转
>> trotx(pi/2)
ans =
1.0000 0 0 0
0 0.9996 -0.0274 0
0 0.0274 0.9996 0
0 0 0 1.0000二:创建机器人对象
1.Link类
A Link object holds all information related to a robot joint and link such as kinematics parameters, rigid-body inertial parameters, motor and transmission parameters.
1.1 Link类相应函数:
A 连杆变换矩阵
RP 关节类型: 'R' 或 'P'
friction 摩擦力
nofriction 摩擦力忽略
dyn 显示动力学参数
islimit 测试关节是否超出软限制
isrevolute 测试是否为旋转关节
isprismatic 测试是否为移动关节
display 连杆参数以表格形式显示
char 转为字符串
1.2link类的运动学,动力学属性参数
theta 关节角度
d 连杆偏移量
a 连杆长度
alpha 连杆扭角
sigma 旋转关节为0,移动关节为1
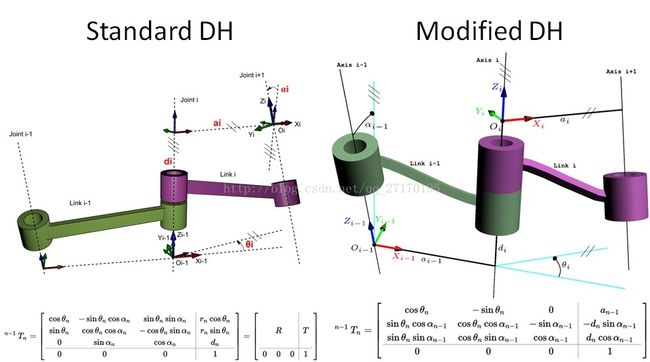
mdh 标准的D&H为0,否则为1
offset 关节变量偏移量(例如绕Z轴的旋转量)
qlim 关节变量范围[min max]
m: 质量
r: 质心
I: 惯性张量
B: 粘性摩擦
Tc: 静摩擦
G: 减速比
Jm: 转子惯量
2.SerialLink类
定义:A concrete class that represents a serial-link arm-type robot. Each link and joint in the chain is described by a Link-class object using Denavit-Hartenberg parameters (standard or modified).
2.1 SerialLink相应函数:
SerialLink(L1 ... Ln) 建立机器人关节连接
gravity :重力加速度
base :基座标系
tool:与基座标系的变换矩阵
qlim :关节极限位置
offset :关节偏移量
name :机器人的名字
manuf :制造者的名字
comment: 注释
config: 关节配置,如‘RRRRRR’
mdh :D-H矩阵类型
theta :D-H参数
d :D-H参数
a :D-H参数
alpha: D-H参数
%定义机器人关节连杆参数,默认为标准DH
L1 = Link('d', 0, 'a', 0, 'alpha', pi/2);
L2 = Link('d', 0, 'a', 0.5, 'alpha', 0,'offset',pi/2);
L3 = Link('d', 0, 'a', 0, 'alpha', pi/2,'offset',pi/4);
L4 = Link('d', 1, 'a', 0, 'alpha', -pi/2);
L5 = Link('d', 0, 'a', 0, 'alpha', pi/2);
L6 = Link('d', 1, 'a', 0, 'alpha', 0);
robot=SerialLink([L1,L2,L3,L4,L5,L6]); %用定义好的关节建立机器人
robot.display(); %显示建立的机器人的DH参数
theta=[0 0 0 0 0 0]; %6个关节的角度变量值都设为0,可以更改
robot.plot(theta); %显示机器人的图像L1 = Link([ pi/4, 0, 0, 0, 0], 'modified');
L2 = Link([ pi/2, 0.2, 0.1, 0 ,0], 'modified');
L3 = Link([ 0, 0.1, 0.2, 0 ,0], 'modified');
robot=SerialLink([L1,L2,L3]); %用定义好的关节建立机器人
robot.display(); %显示建立的机器人的DH参数
theta=[0 0 0]; %6个关节的角度变量值都设为0,可以更改
robot.plot(theta); %显示机器人的图像% for a prismatic joint; and OFFSET is a constant displacement between the
% user joint variable and the value used by the kinematic model.
% - DH = [THETA D A ALPHA SIGMA] where OFFSET is zero.
% - DH = [THETA D A ALPHA], joint is assumed revolute and OFFSET is zero.
但theta的值在定义时我改变后没有效果,而在下方的theta=[0 0 0]中可以通过改变0的值改变相应的theta值