OpenCV3学习(9.4)轮廓矩及其匹配(Moments 、HuMoments、matchShape函数)
矩的概念介绍
矩函数在图像分析中有着广泛的应用,如模式识别、目标分类、目标识别与方位估计、图像的编码与重构等。从一幅图像计算出来的矩集,不仅可以描述图像形状的全局特征,而且可以提供大量关于该图像不同的几何特征信息,如大小,位置、方向和形状等。图像矩这种描述能力广泛应用于各种图像处理、计算机视觉和机器人技术领域的目标识别与方位估计中。
一阶矩:与形状有关;
二阶矩:显示曲线围绕直线平均值的扩展程度;
三阶矩:关于平均值的对称性测量;由二阶矩和三阶矩可以导出7个不变矩。而不变矩是图像的统计特性,满足平移、伸缩、旋转均不变的不变性、在图像识别领域得到广泛的应用。
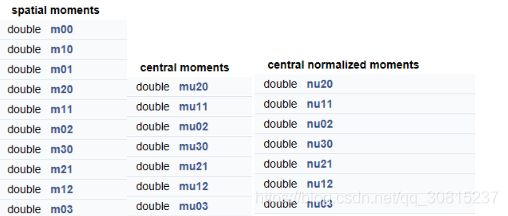
在OpenCV中,可以很方便的计算多边形区域的3阶特征矩,opencv中的矩主要包括以下几种:空间矩,中心矩和中心归一化矩。
class Moments { public: ...... // 空间矩 double m00, m10, m01, m20, m11, m02, m30, m21, m12, m03;
// 中心矩 double mu20, mu11, mu02, mu30, mu21, mu12, mu03;
// 中心归一化矩 double nu20, nu11, nu02, nu30, nu21, nu12, nu03; }
函数原型:
Moments moments( InputArray array, bool binaryImage=false );moments 计算生成数据:
1 、空间矩/几何矩
空间矩的实质为面积或者质量。可以通过一阶矩计算质心/重心。
![]()
可以知道,对于01二值化的图像,m00即为轮廓的面积。
2、中心矩
中心矩体现的是图像强度的最大和最小方向(中心矩可以构建图像的协方差矩阵),其只具有平移不变性,所以用中心矩做匹配效果不会很好。
![]()
其中: ![]()
假设array(x,y)只有0,1是二值图像,则m00表示非0像素总数,即面积。可以这膜理解:先求出所有非零像素的x,y坐标的和,然后除以非零像素的总数,得到的均值作为中心。

3、归一化的中心矩
归一化后具有尺度不变性。

在OpenCV中,还可以很方便的得到Hu不变距,Hu不变矩在图像旋转、缩放、平移等操作后,仍能保持矩的不变性,所以有时候用Hu不变距更能识别图像的特征。
Hu不变矩的基本概念请参考 http://www.cnblogs.com/skyseraph/archive/2011/07/19/2110183.html
Hu不变矩主要是利用归一化中心矩构造了7个不变特征矩:

函数原型:‘
void HuMoments( const Moments& moments, double hu[7] );
void HuMoments( const Moments& m, CV_OUT OutputArray hu );实例:
//图像矩:(Image Moments)
//步骤:提取图像边缘
//发现轮廓
//计算每个轮廓对象的矩
//计算每个对象的中心、弧长、面积
#include"stdafx.h"
#include
#include
#include
using namespace cv;
using namespace std;
Mat src, dst, drawImage;
const char*result = "moments_demo";
int threshold_value = 120;
int threshold_max = 255;
RNG rng(12345);
void Moments_demo(int, void*);
int main(int argc, char*argv)
{
src = imread("111.png");
if (!src.data)
{
printf("could not load image...\n");
return -1;
}
char input[] = "gray image";
namedWindow(input, CV_WINDOW_AUTOSIZE);
namedWindow(result, CV_WINDOW_AUTOSIZE);
//输入图像转为灰度图像
cvtColor(src, dst, CV_BGR2GRAY);
GaussianBlur(dst, dst, Size(3, 3), 0, 0);
imshow(input, dst);
const char*thresh = "threshold value";
createTrackbar(thresh, result, &threshold_value, threshold_max, Moments_demo);
Moments_demo(0, 0);
waitKey(0);
return 0;
}
void Moments_demo(int, void*)
{
//提取图像边缘
Mat canny_out;
Canny(dst, canny_out, threshold_value, threshold_value * 2, 3, false);
//imshow("canny image", canny_out);
//发现轮廓,找到图像轮廓
vector> contours;
vector hierachy;
findContours(canny_out, contours, hierachy, RETR_TREE, CHAIN_APPROX_SIMPLE, Point(0, 0));
//计算每个轮廓对象的矩
vector< Moments> contours_moments(contours.size());
vector centers(contours.size());
for (size_t i = 0; i < contours.size(); i++)
{
//计算矩
contours_moments[i] = moments(contours[i]);
//moments(InputArray array,//输入数据
//bool binaryImage = false // 是否为二值图像
centers[i] = Point(static_cast(contours_moments[i].m10 / contours_moments[i].m00), static_cast(contours_moments[i].m01 / contours_moments[i].m00));
//图像中心Center(x0, y0)=(m10/m00,m01/m00)
}
src.copyTo(drawImage);
for (size_t i = 0; i < contours.size(); i++)
{
printf("centers point x:%.2f,y:%.2f\n", centers[i].x, centers[i].y);
printf("contours %d Area:%.2f Arc length:%.2f \n", i, contourArea(contours[i]), arcLength(contours[i], true));
//contourArea(InputArray contour,//输入轮廓数据
//bool oriented// 默认false、返回绝对值)
//arcLength(InputArray curve,//输入曲线数据
//bool closed// 是否是封闭曲线)
//考虑如何把数据显示在原图像上
//double A;
//A=contourArea(contours[i]);
//ostringstream os;
//os << A;
//putText(drawImage,os.str,centers[i], CV_FONT_BLACK, 2.0, Scalar(0,0,255), 2, 8);
//依次含义:原图,输入字的内容,起始位置,字体,字的大小,颜色,线条大小粗 细,连接域
Scalar color = Scalar(rng.uniform(0, 255), rng.uniform(0, 255), rng.uniform(0, 255));
drawContours(drawImage, contours, i, color, 2, LINE_AA, hierachy, 0, Point(0, 0));//绘制轮廓
circle(drawImage, centers[i], 2, color, 2, LINE_AA);//绘制图形中心
}
imshow(result, drawImage);
return;
}
程序执行后效果图:

from:https://blog.csdn.net/zhu_hongji/article/details/81699736
matchShape函数
最后我们利用matchShape函数比较两个轮廓,如果结果为0,表示两个轮廓完全相似,结果值越大,越不相似,但这个最大值好像并没有归一化。函数原型:
double matchShapes( InputArray contour1, InputArray contour2,
int method, double parameter );
//调用方法
double comres = matchShapes(contours[0], contours[1],CV_CONTOURS_MATCH_I1, 0.0); 前两个参数输入“灰度图像”时,并不是想当然的那样,其内容包含待匹配轮廓图案的灰度图;而是使用一行或一列双通道灰度图或者两列灰度图,该图中的每个像素不是什么图片,而是代表多边形轮廓上各节点的X,Y坐标。????
输入轮廓时每个参数只能是一个轮廓。
官方文档:https://docs.opencv.org/2.4/modules/imgproc/doc/structural_analysis_and_shape_descriptors.html?highlight=matchshapes#cv2.matchShapes
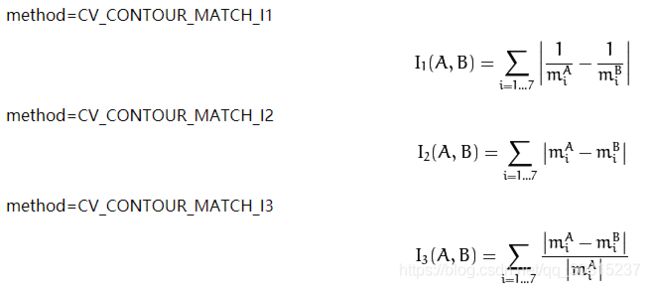
matchShapes函数其实比较的是两个轮廓的Hu不变矩,第三个参数决定比较的方式,即三种不同的判定物体相似的方法
CV_CONTOURS_MATCH_I1
CV_CONTOURS_MATCH_I2
CV_CONTOURS_MATCH_I3
 ,
,![]()
double comres;
comres = matchShapes(contours[0], contours[1], CV_CONTOURS_MATCH_I1, 0.0);
cout<结果:

Hu矩特性:具有旋转,缩放和平移不变性。
由Hu矩组成的特征量对图片进行识别,优点就是速度很快,缺点是识别率比较低。 因此Hu不变矩一般用来识别图像中大的物体,对于物体的形状描述得比较好,图像的纹理特征不能太复杂。
from:https://www.cnblogs.com/mikewolf2002/p/3427564.html