rosspin、rosspinOnce及多线程订阅
背景
因为在一些点云处理的程序中,出现多个订阅者订阅同一个topic,由于内部处理的时间不同,最后造成显示界面出现卡顿,现象就是用鼠标拖动点云的视角会感觉非常卡,不顺畅。为此,决定先走一遍官方的多线程系列教程。
https://github.com/ros/ros_tutorials/tree/jade-devel/roscpp_tutorials
http://wiki.ros.org/roscpp_tutorials/Tutorials
关于Spin和SpinOnce的解释来自英文书《A Gentle Introduction to ROS》P59页

什么时候用ros::spin()和ros::spinOnce()呢,如果仅仅只是响应topic,就用ros::spin()。当程序中除了响应回调函数还有其他重复性工作的时候,那就在循环中做那些工作,然后调用ros::spinOnce()。如下面的用spinOnce,循环调用print( )函数。

这里一直在打印while 中的部分,并且处理message queue。
而下面的打印输出不会更新,相当于只执行了一次,但是它会不断处理ROS 的message queue(下图右边的subscriber 开头的打印函数只调用了一次,然后一直响应订阅的消息)。
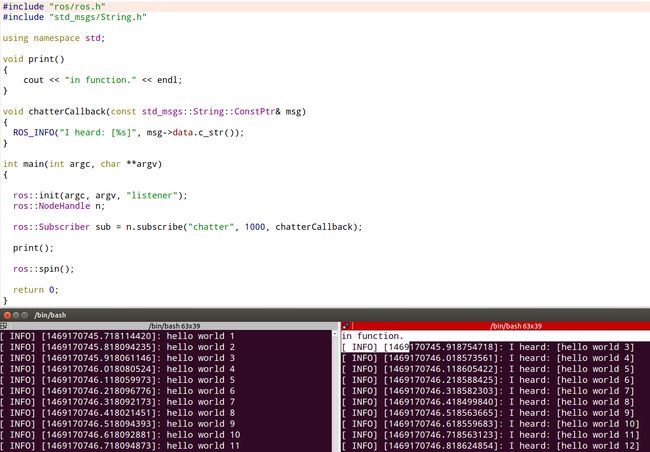
这里只在一开始进入main的时候调用了一次print函数,其余的都在响应topic 去了。
spinOnce( )较常用的做法是while里放publisher所要发布的msg的赋值处理,然后一直循环发布topic。
ros::Rate loop_rate(10);
while (ros::ok())
{
std_msgs::String msg;
std::stringstream ss;
ss << "hello world " << count;
msg.data = ss.str();
chatter_pub.publish(msg);
ros::spinOnce();
loop_rate.sleep();
}1. customer_callback_processing
自定义消息队列处理线程,关键字:JOIN,在主线程spinOnce进入自定义处理线程。
http://wiki.ros.org/roscpp/Overview/Callbacks%20and%20Spinning这里官网给出了补充说明
#include "ros/ros.h"
#include "ros/callback_queue.h"
#include "std_msgs/String.h"
#include
/**
* This tutorial demonstrates the use of custom separate callback queues that can be processed
* independently, whether in different threads or just at different times.
*/
void chatterCallbackMainQueue(const std_msgs::String::ConstPtr& msg)
{
ROS_INFO_STREAM("I heard: [ " << msg->data << "] in thread [" << boost::this_thread::get_id() << "] (Main thread)");
}
void chatterCallbackCustomQueue(const std_msgs::String::ConstPtr& msg)
{
ROS_INFO_STREAM("I heard: [ " << msg->data << "] in thread [" << boost::this_thread::get_id() << "]");
}
/**
* The custom queue used for one of the subscription callbacks
*/
ros::CallbackQueue g_queue;
void callbackThread()
{
ROS_INFO_STREAM("Callback thread id=" << boost::this_thread::get_id());
ros::NodeHandle n;
while (n.ok())
{
g_queue.callAvailable(ros::WallDuration(0.01));
}
}
int main(int argc, char **argv)
{
ros::init(argc, argv, "listener_with_custom_callback_processing");
ros::NodeHandle n;
/**
* The SubscribeOptions structure lets you specify a custom queue to use for a specific subscription.
* You can also set a default queue on a NodeHandle using the NodeHandle::setCallbackQueue() function.
*
* AdvertiseOptions and AdvertiseServiceOptions offer similar functionality.
*/
ros::SubscribeOptions ops = ros::SubscribeOptions::create("chatter", 1000,
chatterCallbackCustomQueue,
ros::VoidPtr(), &g_queue);
ros::Subscriber sub = n.subscribe(ops);
ros::Subscriber sub2 = n.subscribe("chatter", 1000, chatterCallbackMainQueue);
boost::thread chatter_thread(callbackThread);
ROS_INFO_STREAM("Main thread id=" << boost::this_thread::get_id());
ros::Rate r(1);
while (n.ok())
{
ros::spinOnce();
r.sleep();
}
chatter_thread.join();
return 0;
} 
2. listenner_multiple_spin
思想:利用一个类的不同成员函数实现同一个topic的不同处理(在一个线程中)。
#include "ros/ros.h"
#include "std_msgs/String.h"
/**
* This tutorial demonstrates simple receipt of messages over the ROS system, with
* multiple callbacks for the same topic. See the "listener" tutorial for more
* information.
*/
class Listener
{
public:
void chatter1(const std_msgs::String::ConstPtr& msg) { ROS_INFO("chatter1: [%s]", msg->data.c_str()); }
void chatter2(const std_msgs::String::ConstPtr& msg) { ROS_INFO("chatter2: [%s]", msg->data.c_str()); }
void chatter3(const std_msgs::String::ConstPtr& msg) { ROS_INFO("chatter3: [%s]", msg->data.c_str()); }
};
void chatter4(const std_msgs::String::ConstPtr& msg)
{
ROS_INFO("chatter4: [%s]", msg->data.c_str());
}
int main(int argc, char **argv)
{
ros::init(argc, argv, "listener");
ros::NodeHandle n;
Listener l;
ros::Subscriber sub1 = n.subscribe("chatter", 10, &Listener::chatter1, &l);
ros::Subscriber sub2 = n.subscribe("chatter", 10, &Listener::chatter2, &l);
ros::Subscriber sub3 = n.subscribe("chatter", 10, &Listener::chatter3, &l);
ros::Subscriber sub4 = n.subscribe("chatter", 10, chatter4);
ros::spin();
return 0;
}
3. listener_threaded_spin
思想:利用一个类的不同成员函数实现同一个topic的不同处理(在四个不同线程中)。
#include "ros/ros.h"
#include "std_msgs/String.h"
#include
/**
* This tutorial demonstrates simple receipt of messages over the ROS system, using
* a threaded Spinner object to receive callbacks in multiple threads at the same time.
*/
ros::Duration d(0.01);
class Listener
{
public:
void chatter1(const std_msgs::String::ConstPtr& msg)
{
ROS_INFO_STREAM("chatter1: [" << msg->data << "] [thread=" << boost::this_thread::get_id() << "]");
d.sleep();
}
void chatter2(const std_msgs::String::ConstPtr& msg)
{
ROS_INFO_STREAM("chatter2: [" << msg->data << "] [thread=" << boost::this_thread::get_id() << "]");
d.sleep();
}
void chatter3(const std_msgs::String::ConstPtr& msg)
{
ROS_INFO_STREAM("chatter3: [" << msg->data << "] [thread=" << boost::this_thread::get_id() << "]");
d.sleep();
}
};
void chatter4(const std_msgs::String::ConstPtr& msg)
{
ROS_INFO_STREAM("chatter4: [" << msg->data << "] [thread=" << boost::this_thread::get_id() << "]");
d.sleep();
}
int main(int argc, char **argv)
{
ros::init(argc, argv, "listener");
ros::NodeHandle n;
Listener l;
ros::Subscriber sub1 = n.subscribe("chatter", 10, &Listener::chatter1, &l);
ros::Subscriber sub2 = n.subscribe("chatter", 10, &Listener::chatter2, &l);
ros::Subscriber sub3 = n.subscribe("chatter", 10, &Listener::chatter3, &l);
ros::Subscriber sub4 = n.subscribe("chatter", 10, chatter4);
/**
* The MultiThreadedSpinner object allows you to specify a number of threads to use
* to call callbacks. If no explicit # is specified, it will use the # of hardware
* threads available on your system. Here we explicitly specify 4 threads.
*/
ros::MultiThreadedSpinner s(4);
ros::spin(s);
return 0;
}

4. listener_async_spin
因为这里用的是spinOnce,主线程每隔(1/5秒)打印,然后sleep把控制权交给系统,系统然后就把控制权分配到四个子线程,所以结果看到一共是五个线程。
#include "ros/ros.h"
#include "std_msgs/String.h"
#include
/**
* This tutorial demonstrates simple receipt of messages over the ROS system, using
* an asynchronous Spinner object to receive callbacks in multiple threads at the same time.
*/
ros::Duration d(0.01);
class Listener
{
public:
void chatter1(const std_msgs::String::ConstPtr& msg)
{
ROS_INFO_STREAM("chatter1: [" << msg->data << "] [thread=" << boost::this_thread::get_id() << "]");
d.sleep();
}
void chatter2(const std_msgs::String::ConstPtr& msg)
{
ROS_INFO_STREAM("chatter2: [" << msg->data << "] [thread=" << boost::this_thread::get_id() << "]");
d.sleep();
}
void chatter3(const std_msgs::String::ConstPtr& msg)
{
ROS_INFO_STREAM("chatter3: [" << msg->data << "] [thread=" << boost::this_thread::get_id() << "]");
d.sleep();
}
};
void chatter4(const std_msgs::String::ConstPtr& msg)
{
ROS_INFO_STREAM("chatter4: [" << msg->data << "] [thread=" << boost::this_thread::get_id() << "]");
d.sleep();
}
int main(int argc, char **argv)
{
ros::init(argc, argv, "listener");
ros::NodeHandle n;
Listener l;
ros::Subscriber sub1 = n.subscribe("chatter", 10, &Listener::chatter1, &l);
ros::Subscriber sub2 = n.subscribe("chatter", 10, &Listener::chatter2, &l);
ros::Subscriber sub3 = n.subscribe("chatter", 10, &Listener::chatter3, &l);
ros::Subscriber sub4 = n.subscribe("chatter", 10, chatter4);
/**
* The AsyncSpinner object allows you to specify a number of threads to use
* to call callbacks. If no explicit # is specified, it will use the # of hardware
* threads available on your system. Here we explicitly specify 4 threads.
*/
ros::AsyncSpinner s(4);
s.start();
ros::Rate r(5);
while (ros::ok())
{
ROS_INFO_STREAM("Main thread [" << boost::this_thread::get_id() << "].");
r.sleep();
}
return 0;
} 
============2016.11====一次订阅四个topic===============
http://wiki.ros.org/message_filters#ApproximateTime_Policy
https://github.com/tum-vision/rgbd_demo/blob/master/src/example.cpp
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
// Note: for colorized point cloud, use PointXYZRGBA
typedef pcl::PointCloud PointCloud;
using namespace std;
using namespace sensor_msgs;
using namespace message_filters;
ros::Publisher pointcloud_pub;
void callback(const ImageConstPtr& image_color_msg,
const ImageConstPtr& image_depth_msg,
const CameraInfoConstPtr& info_color_msg,
const CameraInfoConstPtr& info_depth_msg)
{
// Solve all of perception here...
cv::Mat image_color = cv_bridge::toCvCopy(image_color_msg)->image;
cv::Mat image_depth = cv_bridge::toCvCopy(image_depth_msg)->image;
cvtColor(image_color,image_color, CV_RGB2BGR);
// colorize the image
cv::Vec3b color(255,0,0);
for(int y=0;y(cv::Point(x,y)) / 1000.0;
if( depth == 0)
{
image_color.at(cv::Point(x,y)) = cv::Vec3b(0,0,255);
}
if( depth > 1.00)
{
image_color.at(cv::Point(x,y)) = cv::Vec3b(255,0,0);
}
}
}
//cout <<"depth[320,240]="<< image_depth.at(cv::Point(320,240)) / 1000.0 <<"m"<< endl;
image_color.at(cv::Point(320,240)) = cv::Vec3b(255,255,255);
// get camera intrinsics
float fx = info_depth_msg->K[0];
float fy = info_depth_msg->K[4];
float cx = info_depth_msg->K[2];
float cy = info_depth_msg->K[5];
//cout << "fx="<< fx << " fy="<points.push_back (pt);
}
}
}
pointcloud_msg->height = 1;
pointcloud_msg->width = pointcloud_msg->points.size();
pointcloud_pub.publish (pointcloud_msg);
cv::imshow("color", image_color);
cv::waitKey(3);
}
int main(int argc, char** argv)
{
ros::init(argc, argv, "vision_node");
ros::NodeHandle nh;
message_filters::Subscriber image_color_sub(nh,"/camera/rgb/image_raw", 1);
message_filters::Subscriber image_depth_sub(nh,"/camera/depth_registered/image_raw", 1);
message_filters::Subscriber info_color_sub(nh,"/camera/rgb/camera_info", 1);
message_filters::Subscriber info_depth_sub(nh,"/camera/depth_registered/camera_info", 1);
pointcloud_pub = nh.advertise ("mypoints", 1);
typedef sync_policies::ApproximateTime MySyncPolicy;
Synchronizer sync(MySyncPolicy(10), image_color_sub, image_depth_sub, info_color_sub, info_depth_sub);
sync.registerCallback(boost::bind(&callback, _1, _2, _3, _4));
ros::spin();
return 0;
}
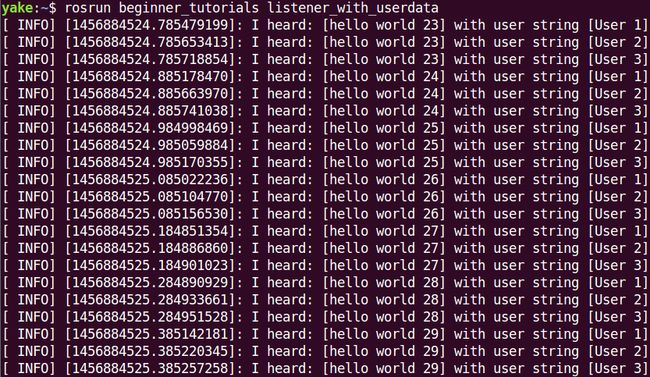
5. listener_with_userdata
利用boost_bind向消息回调函数传入多个参数
关于boost_bind以前写过一个用法简介http://blog.csdn.net/yaked/article/details/44942773
这里是boost::bind(&listener::chatterCallback, this, _1, "User 1" )也即this->chatterCallback( "User1"), _1表示第一个输入参数, 是个占位标记。
#include "ros/ros.h"
#include "std_msgs/String.h"
/**
* This tutorial demonstrates a simple use of Boost.Bind to pass arbitrary data into a subscription
* callback. For more information on Boost.Bind see the documentation on the boost homepage,
* http://www.boost.org/
*/
class Listener
{
public:
ros::NodeHandle node_handle_;
ros::V_Subscriber subs_;
Listener(const ros::NodeHandle& node_handle): node_handle_(node_handle)
{
}
void init()
{
subs_.push_back(node_handle_.subscribe("chatter", 1000, boost::bind(&Listener::chatterCallback, this, _1, "User 1")));
subs_.push_back(node_handle_.subscribe("chatter", 1000, boost::bind(&Listener::chatterCallback, this, _1, "User 2")));
subs_.push_back(node_handle_.subscribe("chatter", 1000, boost::bind(&Listener::chatterCallback, this, _1, "User 3")));
}
void chatterCallback(const std_msgs::String::ConstPtr& msg, std::string user_string)
{
ROS_INFO("I heard: [%s] with user string [%s]", msg->data.c_str(), user_string.c_str());
}
};
int main(int argc, char **argv)
{
ros::init(argc, argv, "listener_with_userdata");
ros::NodeHandle n;
Listener l(n);
l.init();
ros::spin();
return 0;
} 
6. timers
可以参考官网http://wiki.ros.org/roscpp/Overview/Timers
#include "ros/ros.h"
/**
* This tutorial demonstrates the use of timer callbacks.
*/
void callback1(const ros::TimerEvent&)
{
ROS_INFO("Callback 1 triggered");
}
void callback2(const ros::TimerEvent&)
{
ROS_INFO("Callback 2 triggered");
}
int main(int argc, char **argv)
{
ros::init(argc, argv, "talker");
ros::NodeHandle n;
ros::Timer timer1 = n.createTimer(ros::Duration(0.1), callback1);
ros::Timer timer2 = n.createTimer(ros::Duration(1.0), callback2);
ros::spin();
return 0;
}
======================2016.07=====定时器带入附加参数===============
#include "ros/ros.h"
#include "cstring"
#include "iostream"
#include "han_agv/SocketClient.h"
#include "han_agv/VelEncoder.h"
using namespace std;
const float_t PI = 3.14159;
const int ENCODER_PER_LOOP = 900;
const float_t WHEEL_RADIUS = 0.075;
ClientSocket soc;
// ros_tutorials/turtlesim/tutorials/draw_square.cpp
void timerCallback(const ros::TimerEvent&, ros::Publisher vel_pub)
{
ROS_INFO("Timer callback triggered");
AGVDATA buffer;
AGVSENSORS buffer_left_encoder_start;
AGVSENSORS buffer_right_encoder_start;
// if(soc.recvMsg(buffer) == 0)
// {
// cout << "Failed to receive message." << endl;
// return;
// }
// Reverse the High and Low byte.
double time_delay = 0.1;
ros::Duration(time_delay).sleep ();
buffer.SensorsData.WheelLeft_Encoder[0] = buffer.SensorsData.WheelLeft_Encoder[3];
buffer.SensorsData.WheelLeft_Encoder[1] = buffer.SensorsData.WheelLeft_Encoder[2];
buffer.SensorsData.WheelRight_Encoder[0] = buffer.SensorsData.WheelRight_Encoder[3];
buffer.SensorsData.WheelRight_Encoder[1] = buffer.SensorsData.WheelRight_Encoder[2];
han_agv::VelEncoder vel;
vel.left_velocity = 1.0;
vel.right_velocity = 2.0;
vel_pub.publish(vel);
}
int main(int argc, char** argv)
{
ros::init(argc, argv, "TCPDecode_node");
ros::NodeHandle nh;
ROS_INFO("create node successfully!");
ros::Publisher vel_pub = nh.advertise("HansAGV/encoder_vel", 1);
ros::Timer decoder_timer = nh.createTimer(ros::Duration(0.1), boost::bind(timerCallback, _1, vel_pub));
ros::spin();
}
7. notify_connect
#include "ros/ros.h"
#include "std_msgs/String.h"
#include
/**
* This tutorial demonstrates how to get a callback when a new subscriber connects
* to an advertised topic, or a subscriber disconnects.
*/
uint32_t g_count = 0;
void chatterConnect(const ros::SingleSubscriberPublisher& pub)
{
std_msgs::String msg;
std::stringstream ss;
ss << "chatter connect #" << g_count++;
ROS_INFO("%s", ss.str().c_str());
msg.data = ss.str();
pub.publish(msg); // This message will get published only to the subscriber that just connected
}
void chatterDisconnect(const ros::SingleSubscriberPublisher&)
{
ROS_INFO("chatter disconnect");
}
int main(int argc, char **argv)
{
ros::init(argc, argv, "notify_connect");
ros::NodeHandle n;
/**
* This version of advertise() optionally takes a connect/disconnect callback
*/
ros::Publisher pub = n.advertise("chatter", 1000, chatterConnect, chatterDisconnect);
ros::spin();
return 0;
} rosrun beginner_tutorials listener_with_userdata 和另外其他任何一个,因为其他的node名字都重复了,都叫listener。



断开连接,通知延后了一分多钟。囧囧!!
同时订阅和发布
#include
#include
#include
#include // copysign()
using namespace std;
class SubAndPub
{
public:
ros::NodeHandle n_;
double rate;
private:
ros::Publisher pub_;
ros::Subscriber sub_;
// How far away from the goal distance (in meters) before the robot reacts
double x_threshold;
double x_upper_threshold;
// How far away from being centered (y displacement) on the AR marker
// before the robot reacts (units are meters)
double y_threshold ;
double y_upper_threshold ;
// How much do we weight the goal distance (x) when making a movement
double x_scale;
// How much do we weight y-displacement when making a movement
double y_scale ;
// The max linear speed in meters per second
double max_linear_speed ;
// The minimum linear speed in meters per second
double min_linear_speed;
public:
SubAndPub():n_("~")
{
pub_ = n_.advertise("/j2n6s200_driver/in/cartesian_velocity", 5);
sub_ = n_.subscribe("/targetPoint", 20, &SubAndPub::set_cmd_vel, this);
n_.param("rate", rate, 100);// Kinova pub rate <100 won't move.
n_.param("x_threshold", x_threshold, 70);
n_.param("x_upper_threshold", x_upper_threshold, 300);
n_.param("y_threshold", y_threshold, 70);
n_.param("y_threshold", y_upper_threshold, 220);
n_.param("x_scale", x_scale, 0.5);
n_.param("y_scale", y_scale, 0.5);
n_.param("max_linear_speed", max_linear_speed, 2.0);
n_.param("min_linear_speed", min_linear_speed, 0.5);
}
void set_cmd_vel(const geometry_msgs::PointStampedConstPtr& msg)
{
ROS_INFO_ONCE("Target messages detected. Starting follower...");
kinova_msgs::PoseVelocity move_cmd;
double target_offset_y = msg->point.y;
double target_offset_x = msg->point.x;
double speed,speedz;
if( x_threshold 5 pixel.
{
speed = target_offset_x * x_scale;// x_scale = 0.008
move_cmd.twist_linear_x = -1*copysign(min(max_linear_speed, max(min_linear_speed, abs(speed))), speed);
} else
{
move_cmd.twist_linear_x=0.0;
}
if( y_threshold< abs(target_offset_y) && abs(target_offset_y) < y_upper_threshold) // distance > 5 pixel.
{
speedz = target_offset_y * y_scale;// x_scale = 0.008
move_cmd.twist_linear_z = copysign(min(max_linear_speed, max(min_linear_speed, abs(speedz))), speedz);
} else
{
move_cmd.twist_linear_z=0.0;
}
cout< 进阶用法:
https://github.com/ros/ros_comm/blob/noetic-devel/test/test_roscpp/test/src/wait_for_message.cpp