nRF51822使用Timer制作4路PWM波详解
Date:2015.5.8 Author:杨正 QQ:1209758756
一、 pwm简介
PWM英文名叫Pulse Width Modulation,中文名叫脉宽调制。那它到底是什么呢?其实它是由定时器产生的,比普通的定时器多了一个比较寄存器。PWM里面有一个词叫占空比,即一个周期内,高电平持续时间与周期的比值。如下图:

占空比(dutycycle) = t/T。
PWM用途:控制电机调速,控制蜂鸣器播放音乐,控制led灯亮度等
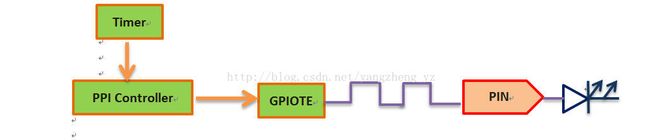
二、 Timer,PPI,GPIOTE之间的关系
由Timer产生一个事件,PPI捕获这个事件并把这个事件转化为任务传递给GPIOTE,由GPIOTE模块执行最终指定操作(该操作后面会讲到):
三、Timer定时器
要产生PWM波,需要将定时器产生的信号通过指定的引脚输出。定时器有两种模式,即计数器模式和定时器模式,要产生PWM波,自然要选择定时器模式,然而定时器模式里面也有一个计数器寄存器,即Counter。定时器模式还有一个捕获/比较寄存器,即CC寄存器。nRF51822的Timer中的Counter是递增的方式计数,当Counter的计数值与CC寄存器中的值相等时,就会产生一个事件。
nRF51822里面有三个定时器,因为TIMER0被CPU占用,所以只能使用TIMER1和TIMER2来做4路PWM波。使用TIMER1的CC[0]和CC[1]分别控制一路PWM波的频率和占空比,CC[2]和CC[3]分别控制第二路PWM波的频率和占空比。TIMER2类推,这样就可以做出4路PWM波。以下是第一路PWM波的timer init函数, 其他三路的timer init函数可以由此类推,eg:
static voidtimer1_cc01_init(void) //第一路PWM波的timer init函数
{
NRF_CLOCK->EVENTS_HFCLKSTARTED = 0;
NRF_CLOCK->TASKS_HFCLKSTART = 1;
while(NRF_CLOCK->EVENTS_HFCLKSTARTED == 0)
{
}
NRF_TIMER1->MODE =TIMER_MODE_MODE_Timer;
NRF_TIMER1->BITMOD=TIMER_BITMODE_BITMODE_16Bit<
NRF_TIMER1->PRESCALER = 9; //9分频,每一个tick为32us
NRF_TIMER1->TASKS_CLEAR = 1;
NRF_TIMER1->CC[0]=256; //控制周期,周期相当于256*32us
NRF_TIMER1->CC[1]= 1; //控制占空比
NRF_TIMER1->SHORTS=(TIMER_SHORTS_COMPARE0_CLEAR_Enabled< NRF_TIMER1->INTENSET= (TIMER_INTENSET_COMPARE0_Enabled << TIMER_INTENSET_COMPARE0_Pos); //使能中断,中断发生时就会产生COMPARE事件,就会即把compare寄存器置1 NVIC_EnableIRQ(TIMER1_IRQn); NVIC_SetPriority(TIMER1_IRQn,APP_IRQ_PRIORITY_HIGH); } void TIMER1_IRQHandler(void) //定时器的中断处理函数;Timer2的中断处理函数类似,这里不再给出。 { //第一路PWM //cc0 controlperiod, cc1 controls the duty cycle NRF_TIMER1->EVENTS_COMPARE[0]= 0; //把Compare寄存器清零 NRF_TIMER1->CC[1] = duty_cycle1_01; //每次timer中断都会重新获取CC[1]的值作为占空比 //第二路PWM //cc2 control period, cc3 controls the duty cycle NRF_TIMER1->EVENTS_COMPARE[2] = 0; NRF_TIMER1->CC[3] = duty_cycle1_23; } 四、ProgrammablePeripheral Interconnect (PPI) nRF51822的寄存器分为三类: Task寄存器:外设可以执行的task; Event寄存器:外设带有的event; 普通寄存器; Task寄存器和Event寄存器在PPI中的使用非常重要,例如,在PPI中,设置EEP寄存器为某个外设A的Event寄存器地址,TEP寄存器设为另外一个外设Task寄存器地址,那么当外设A的event发生时可以直接触发外设B的Task,而不经过CPU。 eg: staticvoid ppi_init(void) //初始化PPI模块,设置EEP寄存器和TEP寄存器 { // Configure PPI channel 01 to togglePWM_OUTPUT_PIN on every TIMER1 COMPARE match. NRF_PPI->CH[0].EEP =(uint32_t)&NRF_TIMER1->EVENTS_COMPARE[0]; NRF_PPI->CH[0].TEP =(uint32_t)&NRF_GPIOTE->TASKS_OUT[0]; NRF_PPI->CH[1].EEP =(uint32_t)&NRF_TIMER1->EVENTS_COMPARE[1]; NRF_PPI->CH[1].TEP =(uint32_t)&NRF_GPIOTE->TASKS_OUT[0]; // Configure PPI channel 23 to toggle PWM_OUTPUT_PIN on every TIMER1COMPARE match. NRF_PPI->CH[2].EEP =(uint32_t)&NRF_TIMER1->EVENTS_COMPARE[2]; NRF_PPI->CH[2].TEP =(uint32_t)&NRF_GPIOTE->TASKS_OUT[1]; NRF_PPI->CH[3].EEP =(uint32_t)&NRF_TIMER1->EVENTS_COMPARE[3]; NRF_PPI->CH[3].TEP =(uint32_t)&NRF_GPIOTE->TASKS_OUT[1]; // Configure PPI channel 45 to toggle PWM_OUTPUT_PIN on every TIMER2COMPARE match. NRF_PPI->CH[4].EEP =(uint32_t)&NRF_TIMER2->EVENTS_COMPARE[0]; NRF_PPI->CH[4].TEP =(uint32_t)&NRF_GPIOTE->TASKS_OUT[2]; NRF_PPI->CH[5].EEP =(uint32_t)&NRF_TIMER2->EVENTS_COMPARE[1]; NRF_PPI->CH[5].TEP = (uint32_t)&NRF_GPIOTE->TASKS_OUT[2]; // Configure PPI channel 67 to toggle PWM_OUTPUT_PIN on every TIMER2COMPARE match. NRF_PPI->CH[6].EEP =(uint32_t)&NRF_TIMER2->EVENTS_COMPARE[2]; NRF_PPI->CH[6].TEP =(uint32_t)&NRF_GPIOTE->TASKS_OUT[3]; NRF_PPI->CH[7].EEP =(uint32_t)&NRF_TIMER2->EVENTS_COMPARE[3]; NRF_PPI->CH[7].TEP =(uint32_t)&NRF_GPIOTE->TASKS_OUT[3]; // Enable PPI channels 0-7. NRF_PPI->CHEN = (PPI_CHEN_CH0_Enabled<< PPI_CHEN_CH0_Pos) | (PPI_CHEN_CH1_Enabled<< PPI_CHEN_CH1_Pos) | (PPI_CHEN_CH2_Enabled<< PPI_CHEN_CH2_Pos) | (PPI_CHEN_CH3_Enabled<< PPI_CHEN_CH3_Pos) |(PPI_CHEN_CH4_Enabled << PPI_CHEN_CH4_Pos) |(PPI_CHEN_CH5_Enabled << PPI_CHEN_CH5_Pos) |(PPI_CHEN_CH6_Enabled << PPI_CHEN_CH6_Pos) |(PPI_CHEN_CH7_Enabled << PPI_CHEN_CH7_Pos); } 注:这里NRF_PPI->CH[n]是指PPI通道。 PPI由两个端点寄存器组成,即Event End-Point (EEP),Task End-Point (TEP)。一个外设任务通过与任务相关的任务寄存器连接到TEP;同样的,一个外设事件通过与事件相关的事件寄存器连接到EEP。 NRF_PPI->CH[0].EEP对应NRF_PPI->CH[0].TEP,以此类推。 EVENT_COMPARE[0]对应CC[0],以此类推。 TASK_OUT[n]指定任务输出通道。 五、GPIOTasks and Events (gpiote) GPIOTE模块也是设计成减少CPU占用的Task Event模式,使得事件不经过CPU直接得到响应。 Event引脚触发源:上升沿,下降沿等; Task引脚操作方式:置位,清零,翻转; Event和Task之间可以通过PPI连接在一起。 一旦把某个引脚分配给Task(OUT[n])或Event(IN[n]),那么该引脚只能被GPIOTE模块写操作,而普通的gpio写入无效。 当GPIOTE通道被配置用于操作一个任务引脚n,那么该引脚n的初值需要在CONFIG[n]寄存器的OUTINIT区域中设定。 eg: staticvoid gpiote_init(void) //初始化GPIOTE模块,设置4路PWM信号输出引脚 { APP_GPIOTE_INIT(APP_GPIOTE_MAX_USERS); // Configure PWM_OUTPUT_PIN_NUMBER as anoutput. nrf_gpio_cfg_output(PWM_OUTPUT_PIN_NUMBER0); nrf_gpio_cfg_output(PWM_OUTPUT_PIN_NUMBER1); nrf_gpio_cfg_output(PWM_OUTPUT_PIN_NUMBER2); nrf_gpio_cfg_output(PWM_OUTPUT_PIN_NUMBER3); // Configure GPIOTE channel 0 to toggle thePWM pin state // @note Only one GPIOTE task can beconnected to an output pin. nrf_gpiote_task_config(0,PWM_OUTPUT_PIN_NUMBER0 , \ NRF_GPIOTE_POLARITY_TOGGLE,NRF_GPIOTE_INITIAL_VALUE_HIGH); nrf_gpiote_task_config(1,PWM_OUTPUT_PIN_NUMBER1 , \ NRF_GPIOTE_POLARITY_TOGGLE, NRF_GPIOTE_INITIAL_VALUE_HIGH); nrf_gpiote_task_config(2,PWM_OUTPUT_PIN_NUMBER2 , \ NRF_GPIOTE_POLARITY_TOGGLE,NRF_GPIOTE_INITIAL_VALUE_HIGH); nrf_gpiote_task_config(3,PWM_OUTPUT_PIN_NUMBER3 , \ NRF_GPIOTE_POLARITY_TOGGLE, NRF_GPIOTE_INITIAL_VALUE_HIGH); } 注:重要函数static__INLINE void nrf_gpiote_task_config(uint32_t channel_number, uint32_tpin_number, nrf_gpiote_polarity_t polarity, nrf_gpiote_outinit_t initial_value) channel_number:指定GPIOTE的通道[0:3],并配置成输出通道,与PPI中的TASK_OUT[n]对应; pin_number:指定pin管脚,在GPIOTE中使用,也就是最终被pwm控制的管脚; polarity:指定在GPIOTE中的极性,当任务信号到达就会执行该动作; initial_value:指定pin管脚的初始值。 六、 总结 问题一:通过pwm波控制灯的亮度范围是全灭到全亮,但是现在做出来的pwm波不能使灯全灭或者全亮。比如我的周期用了256,占空比的范围只能是1到255,这样的话通过占空比是不能控制灯全灭或者全亮。 解决方法:如果占空比为0,或者为256,就会在同一时间触发两个事件,如果占空比为0,即CC[1]=0,那么当计数器超过CC[0]的值(256)时,就会自动置零并从零开始重新计数,而且会产生一个事件,当计数器置零时,CC[1]的值也为零,所以CC[1]也会产生一个事件,所以同一时间会产生两个事件,分别由CC[0],CC[1]产生(这部分是个人理解)。 要设置该PWM引脚为低或者高,可以重新初始化这个引脚的GPIOTE: nrf_gpiote_task_config(0,PWM_OUTPUT_PIN_NUMBER, NRF_GPIOTE_POLARITY_TOGGLE, NRF_GPIOTE_INITIAL_VALUE_HIGH);设置为高或者低,然后把控制他的PPI disable掉。 或者还有一种方法,设置高配置为: nrf_gpiote_task_config(0,PWM_OUTPUT_PIN_NUMBER,NRF_GPIOTE_POLARITY_LOTOHI, NRF_GPIOTE_INITIAL_VALUE_HIGH) 设置低配置为nrf_gpiote_task_config(0, PWM_OUTPUT_PIN_NUMBER,NRF_GPIOTE_POLARITY_HITOLO,NRF_GPIOTE_INITIAL_VALUE_LOW) 可以试试哪种方法比较好用,这里给出后面这种方法: for (; ;) { power_manage(); if (duty_cycle1_01 == 255) { nrf_gpiote_task_config(0,PWM_OUTPUT_PIN_NUMBER0, \ NRF_GPIOTE_POLARITY_LOTOHI,NRF_GPIOTE_INITIAL_VALUE_HIGH); //当占空比为255时,灯最暗(但是微亮),把引脚拉高,就会全灭 // nrf_gpiote_task_config(0,PWM_OUTPUT_PIN_NUMBER0, \ NRF_GPIOTE_POLARITY_HITOLO,NRF_GPIOTE_INITIAL_VALUE_LOW); //当占空比为1时,灯最亮(但不是全亮),把引脚拉低,就会全亮 } ……
所以这样是不能控制灯全灭或者全亮。所以有以下办法能控制灯全亮或者全灭: