【OpenCV】通过最小外接矩形判断物体的平面位置及位姿
文章目录
- 基本原理
- 识别示例
- 代码
基本原理
目标识别中很重要的一点,获取物体的位置及位姿信息。下面提供博主的一种通过物体最小外接矩形来判别的简单方法,必须承认,有一定的局限性,同时精度不高。
首先,假设我们已经识别到目标物体,如下图,用正交的矩形框将其标记出来。这个标记的矩形框所蕴含的信息是比较少的。
通过某些方法(例如将矩形框旋转角度并保持图形外接),我们可以获得目标物体的最小外接矩形(如下图蓝色矩形框)。
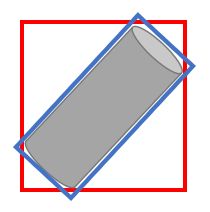
不难发现:
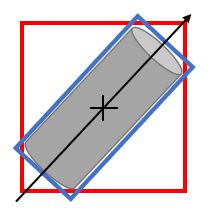
矩形中心 ≈ 目标物体形心
矩形旋转角度 ≈ 目标物体主体轴线相对于正交坐标的转角
通过这个方法,我们就可以简单地获取目标物体的位置和位姿信息。
识别示例
以下图中一把瑞士军刀为例。

首先通过二值化确定目标物体所在的区域。
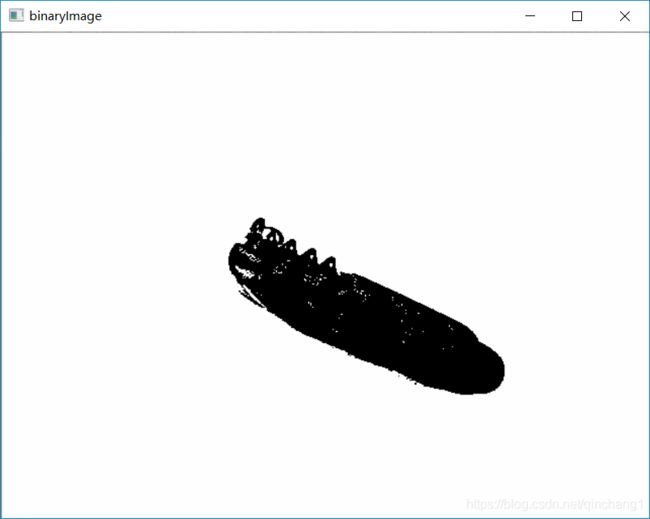
之后再运用最小外接矩形进行框选,通过计算外接矩形的中心点坐标和转角,获得目标物体的位置和位姿信息。

注意:这种方法仅仅是一种简单的判断,具有一定的局限性。例如,如果目标物体形状长宽区分度不高,亦或者形状怪异不均匀,就很难得到较好的结果。
如下图所示是一个集装箱扭锁图片,可以发现其主体部分多出来的拉杆影响到了最小外接矩形的判断。这种情况如果继续想使用本方法的话,就需要去除干扰部分。可以参考我的另一篇博客中提及的一种去除干扰的方法。

代码
#include ps: 1.代码中最小外接矩形主要使用了minAreaRect()函数;
2.细心的朋友可能会发现,我去掉了轮廓点集中的第一组集合,因为第一组集合会框选出整个窗口,目前我也没弄清楚是什么原因,有待改进。
如有错误,欢迎指正!