- AI原生应用必知:5大高效多轮对话框架对比
AI原生应用开发
AI-nativeeasyui前端ai
AI原生应用必知:5大高效多轮对话框架对比关键词:AI原生应用、多轮对话、对话框架、自然语言处理、上下文管理、意图识别、对话状态跟踪摘要:本文深入探讨了构建AI原生应用时必备的5大多轮对话框架,包括Rasa、Dialogflow、MicrosoftBotFramework、AmazonLex和IBMWatsonAssistant。通过对比分析它们的架构设计、核心功能和应用场景,帮助开发者选择最适合
- 对比分析:Rasa、Dialogflow等主流意图识别框架
AI原生应用开发
ai
对比分析:Rasa、Dialogflow等主流意图识别框架——从“翻译官”到“定制师”的对话系统实战指南关键词:意图识别、对话系统、Rasa、Dialogflow、自然语言理解(NLU)摘要:在智能客服、语音助手等AI产品中,“听懂人话”是核心能力。本文将以“意图识别框架”为切入点,用“翻译官”“定制厨房”等生活化比喻,对比分析Rasa(开源派代表)与Dialogflow(商业云服务代表)的技术原
- Rasa 模拟实现超简易医生助手(适合初学练手)
YiHanXii
Rasalinux语言模型docker
下面这个教程的前情提要是:我已经在下载好了docker的rasa镜像,之前写过教程,需要先完成那个下面是一个纯Rasa实现的医生助手第一版项目文件内容,具备基本的“多轮问诊”流程逻辑,通过slot存储用户的多个症状,在最后阶段给出“模拟的诊断建议”。PS:完成这个之后,下一步我还想在Rasa工作过程中引入大模型辅助完成对话流程。项目结构与文件内容✅actions/actions.pyfromtyp
- 搭建 rasa 框架中遇到的 domain.yml 无效问题
悄悄地努力
背景描述今天在用rasa模型构造任务型机器人的过程中,项目原来为:输入餐厅、用餐人数后推荐餐厅的对话型机器人。期望将项目修改为:输入时间、餐厅、用餐人数后推荐餐厅的对话机器人。错误描述Yourform‘restaurant_form’usesaninvalidslotmappingoftype‘form_entity’forslot‘order_datetime’解决方案将type:from_en
- RaSa2.5.x相关概念之二:Domain
great-wind
Rasa
目录多个Domain文件(MultipleDomainFiles)意图(Intents)为某些目的忽略实体(IgnoringEntitiesforCertainIntents)实体(Entities)插槽(Slots)插槽与会话行为(SlotsandConversationBehavior)插槽类型(SlotTypes)TextSlotBooleanSlotCategoricalSlotFloat
- Rasa 的工作流程
YiHanXii
Rasalinux人工智能docker语言模型
Rasa是一个非常灵活的对话系统框架,它的工作流程涉及多个步骤,包括意图识别、槽位填充、对话管理、以及执行自定义动作等。下面是Rasa工作流程的详细解释:1.用户输入用户通过对话界面(比如聊天框、语音输入等)发送信息。这个信息可以是自然语言文本,Rasa将对其进行处理。2.自然语言理解(NLU)当用户输入信息时,Rasa首先通过自然语言理解(NLU)模块对用户的输入进行分析。NLU的主要任务包括:
- Rasa中config.yml文件信息详细解释
YiHanXii
Rasa人工智能
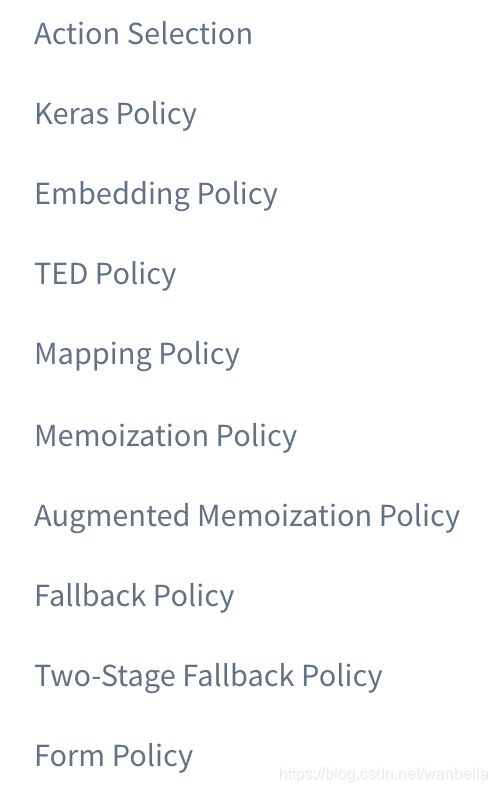
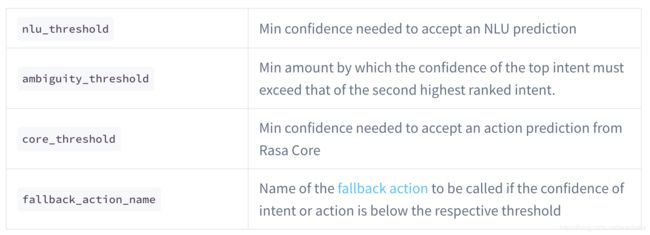
在Rasa中,config.yml是非常关键的配置文件之一,它的作用是定义你的对话机器人使用哪些模型组件来完成:意图识别(NLU)实体抽取(NER)对话管理(Core)作用简述部分功能recipe指定使用哪种Rasa模型训练流程assistant_id项目的唯一标识符,用于部署和版本管理language机器人处理的语言pipeline定义NLU模块的组件流水线(意图识别+实体识别)policies
- Rasa总体目录架构介绍
YiHanXii
Rasa架构docker语言模型
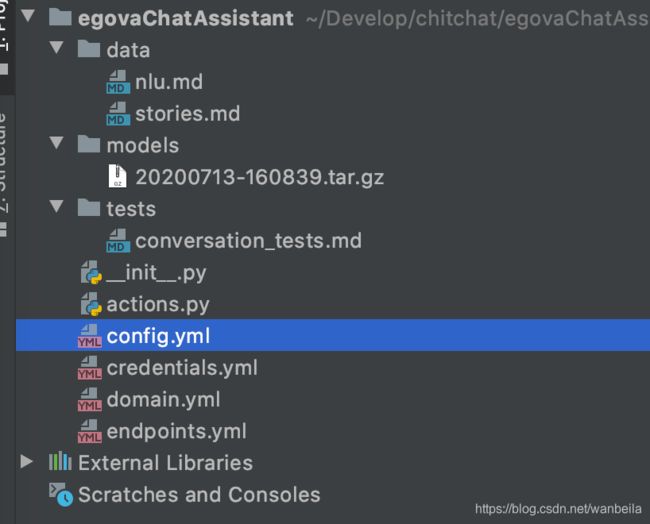
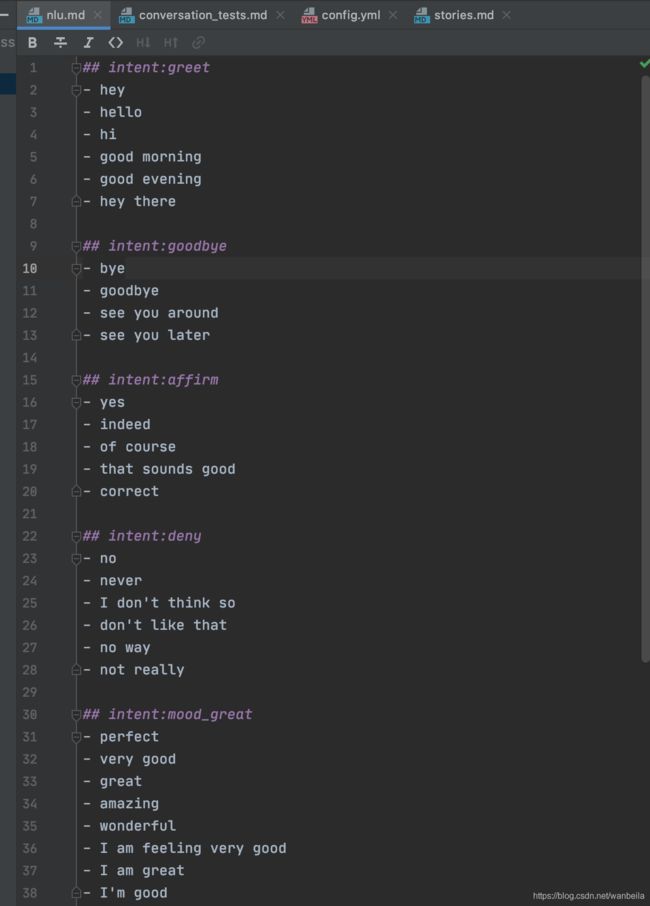
详细讲解一下每个主要文件/目录的作用,以及之后如何一步步使用它们来训练和运行你的聊天机器人。Rasa项目结构说明(初始化后生成的主要文件).├──actions/│└──actions.py#自定义action的地方(Python脚本,和数据库/接口交互等)├──data/│├──nlu.yml#训练RasaNLU的数据(意图识别+实体抽取)│├──rules.yml#规则驱动对话的定义│├──s
- 从零开始构建智能聊天机器人:Rasa与ChatGPT API实战教程
Tech Synapse
机器人chatgptRasa框架NLU
引言:AI对话系统的时代机遇在数字化转型浪潮中,聊天机器人已成为连接用户与服务的关键纽带。无论是客服系统中的7×24小时即时响应,还是智能家居中的语音交互,聊天机器人正在重塑人机交互方式。本文将通过详细教程,手把手教你使用Rasa框架和ChatGPTAPI构建可交互的Web端聊天机器人,涵盖环境搭建、模型训练、API调用到部署运维的全流程。一、技术选型:Rasa与ChatGPT的核心优势Rasa框
- BERT轻量化探索—模型剪枝(BERT Pruning)—Rasa维度剪枝
PaperAgent
9NLPbert轻量化pruningrasa剪枝
由于BERT参数众多,模型庞大,训练与推理速度较慢,在一些实时性要求较高应用场景无法满足需求,最近开始探索BERT轻量化部署BERT轻量化的方式:低精度量化。在模型训练和推理中使用低精度(FP16甚至INT8、二值网络)表示取代原有精度(FP32)表示。模型裁剪和剪枝。减少模型层数和参数规模。模型蒸馏。通过知识蒸馏方法[22]基于原始BERT模型蒸馏出符合上线要求的小模型。本文主要分享下BERT的
- Rasa 3.x 学习系列-ElasticSearch对话机器人实战 一
段智华
Rasa智能对话机器人Rasa面试Rasa对话机器人Rasa课程Rasa培训Rasa
Rasa3.x学习系列-ElasticSearch对话机器人实战一目录ElasticSearch简介ElasticSearch安装ElasticSearch-head安装ElasticSearch简介Elasticsearch是一个分布式、RESTful风格的搜索和数据分析引擎,能够解决不断涌现出的各种用例。作为ElasticStack的核心,它集中存储您的数据,帮助您发现意料之中以及意料之外的情
- Rasa Webchat:开源聊天机器人组件
乌昱有Melanie
RasaWebchat:开源聊天机器人组件rasa-webchatAfeature-richchatwidgetforRasaandBotfront项目地址:https://gitcode.com/gh_mirrors/ra/rasa-webchatRasaWebchat是一个开源项目,旨在为Rasa或Botfront开发的虚拟助手提供在任意网站上部署的聊天窗口组件。该项目主要使用JavaScri
- 硅谷硬核Rasa课程、Rasa培训、Rasa面试系列之: Rasa 3.x Config
StarSpaceNLP
面试职场和发展
ModelConfiguration配置文件定义了模型根据用户输入进行预测的组件和策略。recipe键允许不同类型的配置和模型架构。目前,只支持“default.v1”。语言键和管道键指定模型用于进行NLU预测的组件。Policys键定义了模型用于预测下一个操作的策略。如果您不知道要选择哪些组件或策略,可以使用建议的配置功能,这将推荐合理的默认设置。SuggestedConfig您可以将管道或策略
- Rasa:开源的机器学习框架
Indra_ran
开源机器学习人工智能linuxcentos运维
一、Rasa简介Rasa是一套用来构建基于上下文的AI小助手和聊天机器人框架。分为两个主要的模块:NLU:自然语言理解模块,实现意图识别以及槽值的提取,将用户的输入转化为结构性数据,在训练过程中,为了提高从用户信息的实体识别能力,采用了预先训练的实体提取器Pre-trainedEntityExtractors,正则表达式Regexes,同义词Synonyms等RasaCore:对话管理模块,也是一
- 基于医疗知识图谱的问答系统 基于知识图谱的多轮问答 附完整代码数据详细教程
计算机毕设论文
深度学习-自然语言处理nlp医疗知识知识图谱Neo4j多轮问答
这个项目已实现的功能:1.闲聊类的单论对话2.基于知识图谱的多轮问答数据链接:链接:https://pan.baidu.com/s/1oPr1m8aaIeoMu53OIEULPg提取码:fh39一、项目来源由于之前用Rasa构建过对话系统,因此一直想脱离Rasa这个开源框架,从底层开始构建一个可以实现相似功能的对话系统,毕竟框架用的再溜,都不如自己做一遍。恰巧在Rasa群里看到了前辈分享的一个项目
- OpenEuler学习笔记(二十一):搭建企业AI客户服务例子
向上的车轮
openEuler笔记学习笔记人工智能
在OpenEuler上搭建企业AI客服可以按照以下步骤进行,以下将以使用开源的Rasa框架作为AI客服核心,搭配前端界面展示为例:1.系统准备1.1安装OpenEuler确保你已经安装好了OpenEuler操作系统,可以从官方网站下载镜像进行安装,安装过程中根据提示完成磁盘分区、用户设置等操作。1.2更新系统使用以下命令更新系统软件包到最新版本:sudodnfupdate-y2.安装必要的依赖2.
- rasa填表单激活和结束逻辑代码书写问题 active_loop关键字、写在rules中还是stories中、实际应用
Silber 甜
官方给的填表单样例是这样婶儿的https://rasa.com/docs/rasa/playground具体逻辑:1.forms文件中或domain文件中定义表单,以及表单中要填的槽位(可以定义多个槽位,rasa会按照需要的槽值顺序执行一遍。eg.nameemail)forms:newsletter_form:required_slots:name:-type:from_textemail:-ty
- Rasa框架的优点和缺点
不会编程的程序猿ᅟ
rasa
优点1.开源和免费Rasa是开源的,无需支付许可费用,可自由下载和修改源码,适合预算有限或需要定制化解决方案的团队。企业可以完全掌控自己的对话系统,无需依赖外部服务。2.数据隐私和安全Rasa支持完全本地部署,无需将数据上传到第三方服务器,数据隐私保护性高,非常适合医疗、金融和其他注重数据安全的行业。3.高度可定制化可以根据需求修改NLU管道、策略和模型。支持自定义动作(CustomActions
- Rasa的工作流程
不会编程的程序猿ᅟ
rasa
Rasa的工作流程分为两个主要部分:NLU(自然语言理解)和Core(对话管理)。整个流程包括从用户输入到最终响应的多个步骤,下面是详细的工作流程解析:1.用户输入用户通过聊天界面(如微信、Telegram、Slack或Web前端)发送自然语言消息,例如:"我想预订一张明天去北京的火车票"2.自然语言理解(NLU)Rasa的NLU模块解析用户输入,提取意图和实体。2.1意图识别NLU模块会识别用户
- 执行rasa shell 遇到asyncio.exceptions.TimeoutError报错
天飓
RASA学习树莓派聊天机器人rasapython
在《树莓派3B运行rasainit和rasashell遇到的tensorflow报错总结》一文中,我遇到的第7个报错是首次运行rasashell时候碰到的。按照我在文中记录的解决方案,处理成功。结果,今天我又一次遇到了asyncio-Taskexceptionwasneverretrieved的报错(如图),我先是吃了一惊,然后第一反应是按照上次的处理方法又操作了一遍,然后……然并卵!怎么会无效?
- 树莓派3B运行rasa init和rasa shell遇到的tensorflow报错总结
天飓
树莓派实验室tensorflowpython树莓派rasa
终于在我的树莓派上安装rasa-1.4.0版本成功(见《树莓派智能语音助手之聊天机器人-RASA》)。不过,在初始化rasa的时候还是遇到了很多报错,在此总结,供朋友们参考。1.ModuleNotFoundError:Nomodulenamed‘tensorflow.contrib‘根源:这个报错通常出现在tensorflow-2.0版本,是因为在这个版本里已经去掉了contrib这个模块,改成了
- PyTorch-线性回归
一个高效工作的家伙
pythonpytorch线性回归python
已经进入大模微调的时代,但是学习pytorch,对后续学习rasa框架有一定帮助吧。x_train=np.array([[3.3],[4.4],[5.5],[6.71],[6.93],[4.168],[9.779],[6.182],[7.59],[2.167],[7.042],[10.791],[5.313],[7.997],[3.1]],dtype=np.float32)y_train=np.a
- 遇见最美的你|动态静心
魔力Jenny
很多事情发生好像没有预兆一样,但又好像冥冥中有牵引。最近思绪比较混乱,尝试瑜伽,冥想各种方法静心,让自己慢下来,与自己待在一起。最爱的却是动态的方式~静心Partone:动态冥想开始前静心,坐住冥想片刻,找到感觉~音乐响起,站立起身,Rasa声音指引,闭上双眼,慢慢放松全身各个部位、关节,放下焦虑与戒备,开始挪动身体。随着音乐节奏和频率越来越强,Rasa带领扭动身体,睁开眼,让潜意识带着身体移动。
- 对话机器人(二)——RASA概述与安装
就要辣谢谢。
对话机器人人工智能自然语言处理深度学习
注:RASA版本为3.11.RASA简介RASA是构建对话机器人的开源机器学习框架。NLU:确定意图,捕获关键上下文信息。CORE:提供多轮对话管理机制,自动学习上下文与当前意图的关联性。2.RASA系统架构RASA开源体系结构NLU:意图分类、实体提取、响应检索。以管道的方式处理用户对话。对话管理:根据上下文决定对话中的下一个动作。代理:接收用户输入消息,返回RASA系统的回答。连接NLU和DM
- 自然语言处理(NLP)——使用Rasa创建聊天机器人
思诺学长
NLP自然语言处理机器人nlp自然语言处理
1基本概念1.1自然语言处理的分类IR-BOT:检索型问答系统Task-bot:任务型对话系统Chitchat-bot:闲聊系统1.2任务型对话Task-Bot:task-orientedbot这张图展示了一个语音对话系统(或聊天机器人)的基本组成部分和它们之间的工作流程。这个系统可以接受语音信号作为输入,输出文本响应,并且它包括以下几个主要部分:1.2.1自动语音识别(ASR)这个部分的任务是将
- 关于MicrosoftVisualStudio如何加载不是在自己环境下安装的PIP库的问题
lckj2009
工具使用pythonanaconda
因为项目需要,我把PYTHON的最新环境和PIP库建在了Anaconda3下了。Anaconda3是从网上下载的独立的安装包,不是MicrosoftVisualStudio自带的Anaconda3。RASA等框架也都装在了网上这个Anaconda3环境下的PIP库里了。结果在MicrosoftVisualStudio运行RASA库是报错,说找不到RASA库。这该怎么解决呢?其实解决方法很简单,在V
- RASA3.X(二)--常见命令详解
hanscalZheng
RASARASA命令模式
目录创建新项目训练模型交互式学习与助手交谈启动服务启动操作服务可视化故事评估模型训练和测试数据拆分创建新项目以下命令使用示例训练数据为你建立一个完整的项目。rasainit这将创建以下文件:.├──__init__.py├──actions.py├──config.yml├──credentials.yml├──data│├──nlu.md│└──stories.md├──domain.yml├─
- rasa3.X 自定义action的注册问题
Guido_PSG
rasapython
rasa3.X自定义action的注册问题文章目录rasa3.X自定义action的注册问题前言一、问题重述二、问题解决前言幸好在这之前抽时间稍微看了一点django源码,让我对于python的导入机制有了一个概念。虽然还不是很确切的知道pythonimport机制,不过在看到类似_import_submodules,importlib.import_module等方法的时候,也能大概知道要干什么
- Rasa课程系列之:业务对话机器人Rasa核心算法DIET及TED论文详解及源码实现
StarSpaceNLP667
StarSpaceNLPTransformer算法人工智能Rasa课程培训面试深度学习自然语言处理
对一个智能业务对话系统而言,语言理解NLU及Policies是其系统内核的两大基石。Rasa团队发布的最重磅级的两篇论文DIET:LightweightLanguageUnderstandingforDialogueSystems及DialogueTransformers是其基于在业界落地场景的多年探索而总结出来的解决NLU和Policies最核心的成果结晶:其中DIET是Intent识别和Ent
- NLP 高手之路101课(模型、算法、论文、源码、案例 + 1年答疑)
Eric_1694
课程名称:NLP高手之路101课(模型、算法、论文、源码、案例+1年答疑)课程关键词:NLP、Transformer、BERT、GPT、Bayesian、Rasa、Transferlearning、ConversationalAI、Classifiers、Policies、DialogueManagement、NER、Pre-training、Fine-tuning、DIET、TED、Simple
- github中多个平台共存
jackyrong
github
在个人电脑上,如何分别链接比如oschina,github等库呢,一般教程之列的,默认
ssh链接一个托管的而已,下面讲解如何放两个文件
1) 设置用户名和邮件地址
$ git config --global user.name "xx"
$ git config --global user.email "
[email protected]"
- ip地址与整数的相互转换(javascript)
alxw4616
JavaScript
//IP转成整型
function ip2int(ip){
var num = 0;
ip = ip.split(".");
num = Number(ip[0]) * 256 * 256 * 256 + Number(ip[1]) * 256 * 256 + Number(ip[2]) * 256 + Number(ip[3]);
n
- 读书笔记-jquey+数据库+css
chengxuyuancsdn
htmljqueryoracle
1、grouping ,group by rollup, GROUP BY GROUPING SETS区别
2、$("#totalTable tbody>tr td:nth-child(" + i + ")").css({"width":tdWidth, "margin":"0px", &q
- javaSE javaEE javaME == API下载
Array_06
java
oracle下载各种API文档:
http://www.oracle.com/technetwork/java/embedded/javame/embed-me/documentation/javame-embedded-apis-2181154.html
JavaSE文档:
http://docs.oracle.com/javase/8/docs/api/
JavaEE文档:
ht
- shiro入门学习
cugfy
javaWeb框架
声明本文只适合初学者,本人也是刚接触而已,经过一段时间的研究小有收获,特来分享下希望和大家互相交流学习。
首先配置我们的web.xml代码如下,固定格式,记死就成
<filter>
<filter-name>shiroFilter</filter-name>
&nbs
- Array添加删除方法
357029540
js
刚才做项目前台删除数组的固定下标值时,删除得不是很完整,所以在网上查了下,发现一个不错的方法,也提供给需要的同学。
//给数组添加删除
Array.prototype.del = function(n){
- navigation bar 更改颜色
张亚雄
IO
今天郁闷了一下午,就因为objective-c默认语言是英文,我写的中文全是一些乱七八糟的样子,到不是乱码,但是,前两个自字是粗体,后两个字正常体,这可郁闷死我了,问了问大牛,人家告诉我说更改一下字体就好啦,比如改成黑体,哇塞,茅塞顿开。
翻书看,发现,书上有介绍怎么更改表格中文字字体的,代码如下
- unicode转换成中文
adminjun
unicode编码转换
在Java程序中总会出现\u6b22\u8fce\u63d0\u4ea4\u5fae\u535a\u641c\u7d22\u4f7f\u7528\u53cd\u9988\uff0c\u8bf7\u76f4\u63a5这个的字符,这是unicode编码,使用时有时候不会自动转换成中文就需要自己转换了使用下面的方法转换一下即可。
/**
* unicode 转换成 中文
- 一站式 Java Web 框架 firefly
aijuans
Java Web
Firefly是一个高性能一站式Web框架。 涵盖了web开发的主要技术栈。 包含Template engine、IOC、MVC framework、HTTP Server、Common tools、Log、Json parser等模块。
firefly-2.0_07修复了模版压缩对javascript单行注释的影响,并新增了自定义错误页面功能。
更新日志:
增加自定义系统错误页面功能
- 设计模式——单例模式
ayaoxinchao
设计模式
定义
Java中单例模式定义:“一个类有且仅有一个实例,并且自行实例化向整个系统提供。”
分析
从定义中可以看出单例的要点有三个:一是某个类只能有一个实例;二是必须自行创建这个实例;三是必须自行向系统提供这个实例。
&nb
- Javascript 多浏览器兼容性问题及解决方案
BigBird2012
JavaScript
不论是网站应用还是学习js,大家很注重ie与firefox等浏览器的兼容性问题,毕竟这两中浏览器是占了绝大多数。
一、document.formName.item(”itemName”) 问题
问题说明:IE下,可以使用 document.formName.item(”itemName”) 或 document.formName.elements ["elementName&quo
- JUnit-4.11使用报java.lang.NoClassDefFoundError: org/hamcrest/SelfDescribing错误
bijian1013
junit4.11单元测试
下载了最新的JUnit版本,是4.11,结果尝试使用发现总是报java.lang.NoClassDefFoundError: org/hamcrest/SelfDescribing这样的错误,上网查了一下,一般的解决方案是,换一个低一点的版本就好了。还有人说,是缺少hamcrest的包。去官网看了一下,如下发现:
- [Zookeeper学习笔记之二]Zookeeper部署脚本
bit1129
zookeeper
Zookeeper伪分布式安装脚本(此脚本在一台机器上创建Zookeeper三个进程,即创建具有三个节点的Zookeeper集群。这个脚本和zookeeper的tar包放在同一个目录下,脚本中指定的名字是zookeeper的3.4.6版本,需要根据实际情况修改):
#!/bin/bash
#!!!Change the name!!!
#The zookeepe
- 【Spark八十】Spark RDD API二
bit1129
spark
coGroup
package spark.examples.rddapi
import org.apache.spark.{SparkConf, SparkContext}
import org.apache.spark.SparkContext._
object CoGroupTest_05 {
def main(args: Array[String]) {
v
- Linux中编译apache服务器modules文件夹缺少模块(.so)的问题
ronin47
modules
在modules目录中只有httpd.exp,那些so文件呢?
我尝试在fedora core 3中安装apache 2. 当我解压了apache 2.0.54后使用configure工具并且加入了 --enable-so 或者 --enable-modules=so (两个我都试过了)
去make并且make install了。我希望在/apache2/modules/目录里有各种模块,
- Java基础-克隆
BrokenDreams
java基础
Java中怎么拷贝一个对象呢?可以通过调用这个对象类型的构造器构造一个新对象,然后将要拷贝对象的属性设置到新对象里面。Java中也有另一种不通过构造器来拷贝对象的方式,这种方式称为
克隆。
Java提供了java.lang.
- 读《研磨设计模式》-代码笔记-适配器模式-Adapter
bylijinnan
java设计模式
声明: 本文只为方便我个人查阅和理解,详细的分析以及源代码请移步 原作者的博客http://chjavach.iteye.com/
package design.pattern;
/*
* 适配器模式解决的主要问题是,现有的方法接口与客户要求的方法接口不一致
* 可以这样想,我们要写这样一个类(Adapter):
* 1.这个类要符合客户的要求 ---> 那显然要
- HDR图像PS教程集锦&心得
cherishLC
PS
HDR是指高动态范围的图像,主要原理为提高图像的局部对比度。
软件有photomatix和nik hdr efex。
一、教程
叶明在知乎上的回答:
http://www.zhihu.com/question/27418267/answer/37317792
大意是修完后直方图最好是等值直方图,方法是HDR软件调一遍,再结合不透明度和蒙版细调。
二、心得
1、去除阴影部分的
- maven-3.3.3 mvn archetype 列表
crabdave
ArcheType
maven-3.3.3 mvn archetype 列表
可以参考最新的:http://repo1.maven.org/maven2/archetype-catalog.xml
[INFO] Scanning for projects...
[INFO]
- linux shell 中文件编码查看及转换方法
daizj
shell中文乱码vim文件编码
一、查看文件编码。
在打开文件的时候输入:set fileencoding
即可显示文件编码格式。
二、文件编码转换
1、在Vim中直接进行转换文件编码,比如将一个文件转换成utf-8格式
&
- MySQL--binlog日志恢复数据
dcj3sjt126com
binlog
恢复数据的重要命令如下 mysql> flush logs; 默认的日志是mysql-bin.000001,现在刷新了重新开启一个就多了一个mysql-bin.000002
- 数据库中数据表数据迁移方法
dcj3sjt126com
sql
刚开始想想好像挺麻烦的,后来找到一种方法了,就SQL中的 INSERT 语句,不过内容是现从另外的表中查出来的,其实就是 MySQL中INSERT INTO SELECT的使用
下面看看如何使用
语法:MySQL中INSERT INTO SELECT的使用
1. 语法介绍
有三张表a、b、c,现在需要从表b
- Java反转字符串
dyy_gusi
java反转字符串
前几天看见一篇文章,说使用Java能用几种方式反转一个字符串。首先要明白什么叫反转字符串,就是将一个字符串到过来啦,比如"倒过来念的是小狗"反转过来就是”狗小是的念来过倒“。接下来就把自己能想到的所有方式记录下来了。
1、第一个念头就是直接使用String类的反转方法,对不起,这样是不行的,因为Stri
- UI设计中我们为什么需要设计动效
gcq511120594
UIlinux
随着国际大品牌苹果和谷歌的引领,最近越来越多的国内公司开始关注动效设计了,越来越多的团队已经意识到动效在产品用户体验中的重要性了,更多的UI设计师们也开始投身动效设计领域。
但是说到底,我们到底为什么需要动效设计?或者说我们到底需要什么样的动效?做动效设计也有段时间了,于是尝试用一些案例,从产品本身出发来说说我所思考的动效设计。
一、加强体验舒适度
嗯,就是让用户更加爽更加爽的用
- JBOSS服务部署端口冲突问题
HogwartsRow
java应用服务器jbossserverEJB3
服务端口冲突问题的解决方法,一般修改如下三个文件中的部分端口就可以了。
1、jboss5/server/default/conf/bindingservice.beans/META-INF/bindings-jboss-beans.xml
2、./server/default/deploy/jbossweb.sar/server.xml
3、.
- 第三章 Redis/SSDB+Twemproxy安装与使用
jinnianshilongnian
ssdbreidstwemproxy
目前对于互联网公司不使用Redis的很少,Redis不仅仅可以作为key-value缓存,而且提供了丰富的数据结果如set、list、map等,可以实现很多复杂的功能;但是Redis本身主要用作内存缓存,不适合做持久化存储,因此目前有如SSDB、ARDB等,还有如京东的JIMDB,它们都支持Redis协议,可以支持Redis客户端直接访问;而这些持久化存储大多数使用了如LevelDB、RocksD
- ZooKeeper原理及使用
liyonghui160com
ZooKeeper是Hadoop Ecosystem中非常重要的组件,它的主要功能是为分布式系统提供一致性协调(Coordination)服务,与之对应的Google的类似服务叫Chubby。今天这篇文章分为三个部分来介绍ZooKeeper,第一部分介绍ZooKeeper的基本原理,第二部分介绍ZooKeeper
- 程序员解决问题的60个策略
pda158
框架工作单元测试
根本的指导方针
1. 首先写代码的时候最好不要有缺陷。最好的修复方法就是让 bug 胎死腹中。
良好的单元测试
强制数据库约束
使用输入验证框架
避免未实现的“else”条件
在应用到主程序之前知道如何在孤立的情况下使用
日志
2. print 语句。往往额外输出个一两行将有助于隔离问题。
3. 切换至详细的日志记录。详细的日
- Create the Google Play Account
sillycat
Google
Create the Google Play Account
Having a Google account, pay 25$, then you get your google developer account.
References:
http://developer.android.com/distribute/googleplay/start.html
https://p
- JSP三大指令
vikingwei
jsp
JSP三大指令
一个jsp页面中,可以有0~N个指令的定义!
1. page --> 最复杂:<%@page language="java" info="xxx"...%>
* pageEncoding和contentType:
> pageEncoding:它