Camera Calibration(opencv官方实例)
Camera Calibration
1、stereo_calib.cpp代码:
/* This is sample from the OpenCV book. The copyright notice is below */
/* *************** License:**************************
************************************************** */
#include "opencv2/calib3d/calib3d.hpp"
#include "opencv2/highgui/highgui.hpp"
#include "opencv2/imgproc/imgproc.hpp"
#include
#include
#include
#include
#include
#include
#include
#include
using namespace cv;
using namespace std;
static int print_help()
{
cout <<
" Given a list of chessboard images, the number of corners (nx, ny)\n"
" on the chessboards, and a flag: useCalibrated for \n"
" calibrated (0) or\n"
" uncalibrated \n"
" (1: use cvStereoCalibrate(), 2: compute fundamental\n"
" matrix separately) stereo. \n"
" Calibrate the cameras and display the\n"
" rectified results along with the computed disparity images. \n" << endl;
cout << "Usage:\n ./stereo_calib -w board_width -h board_height [-nr /*dot not view results*/] \n" << endl;
return 0;
}
static void StereoCalib(const vector& imagelist, Size boardSize, bool useCalibrated=true, bool showRectified=true)
{
if( imagelist.size() % 2 != 0 )
{
cout << "Error: the image list contains odd (non-even) number of elements\n";
return;
}
bool displayCorners = false;//true;
const int maxScale = 2;
const float squareSize = 1.f; // Set this to your actual square size
// ARRAY AND VECTOR STORAGE:
vector > imagePoints[2];
vector > objectPoints;
Size imageSize;
int i, j, k, nimages = (int)imagelist.size()/2;
imagePoints[0].resize(nimages);
imagePoints[1].resize(nimages);
vector goodImageList;
for( i = j = 0; i < nimages; i++ )
{
for( k = 0; k < 2; k++ )
{
const string& filename = imagelist[i*2+k];
Mat img = imread(filename, 0);
if(img.empty())
break;
if( imageSize == Size() )
imageSize = img.size();
else if( img.size() != imageSize )
{
cout << "The image " << filename << " has the size different from the first image size. Skipping the pair\n";
break;
}
bool found = false;
vector& corners = imagePoints[k][j];
for( int scale = 1; scale <= maxScale; scale++ )
{
Mat timg;
if( scale == 1 )
timg = img;
else
resize(img, timg, Size(), scale, scale);
found = findChessboardCorners(timg, boardSize, corners,
CV_CALIB_CB_ADAPTIVE_THRESH | CV_CALIB_CB_NORMALIZE_IMAGE);
if( found )
{
if( scale > 1 )
{
Mat cornersMat(corners);
cornersMat *= 1./scale;
}
break;
}
}
if( displayCorners )
{
cout << filename << endl;
Mat cimg, cimg1;
cvtColor(img, cimg, COLOR_GRAY2BGR);
drawChessboardCorners(cimg, boardSize, corners, found);
double sf = 640./MAX(img.rows, img.cols);
resize(cimg, cimg1, Size(), sf, sf);
imshow("corners", cimg1);
char c = (char)waitKey(500);
if( c == 27 || c == 'q' || c == 'Q' ) //Allow ESC to quit
exit(-1);
}
else
putchar('.');
if( !found )
break;
cornerSubPix(img, corners, Size(11,11), Size(-1,-1),
TermCriteria(CV_TERMCRIT_ITER+CV_TERMCRIT_EPS,30, 0.01));
}
if( k == 2 )
{
goodImageList.push_back(imagelist[i*2]);
goodImageList.push_back(imagelist[i*2+1]);
j++;
}
}
cout << j << " pairs have been successfully detected.\n";
nimages = j;
if( nimages < 2 )
{
cout << "Error: too little pairs to run the calibration\n";
return;
}
imagePoints[0].resize(nimages);
imagePoints[1].resize(nimages);
objectPoints.resize(nimages);
for( i = 0; i < nimages; i++ )
{
for( j = 0; j < boardSize.height; j++ )
for( k = 0; k < boardSize.width; k++ )
objectPoints[i].push_back(Point3f(j*squareSize, k*squareSize, 0));
}
cout << "Running stereo calibration ...\n";
Mat cameraMatrix[2], distCoeffs[2];
cameraMatrix[0] = Mat::eye(3, 3, CV_64F);
cameraMatrix[1] = Mat::eye(3, 3, CV_64F);
Mat R, T, E, F;
double rms = stereoCalibrate(objectPoints, imagePoints[0], imagePoints[1],
cameraMatrix[0], distCoeffs[0],
cameraMatrix[1], distCoeffs[1],
imageSize, R, T, E, F,
TermCriteria(CV_TERMCRIT_ITER+CV_TERMCRIT_EPS, 100, 1e-5),
CV_CALIB_FIX_ASPECT_RATIO +
CV_CALIB_ZERO_TANGENT_DIST +
CV_CALIB_SAME_FOCAL_LENGTH +
CV_CALIB_RATIONAL_MODEL +
CV_CALIB_FIX_K3 + CV_CALIB_FIX_K4 + CV_CALIB_FIX_K5);
cout << "done with RMS error=" << rms << endl;
// CALIBRATION QUALITY CHECK
// because the output fundamental matrix implicitly
// includes all the output information,
// we can check the quality of calibration using the
// epipolar geometry constraint: m2^t*F*m1=0
double err = 0;
int npoints = 0;
vector lines[2];
for( i = 0; i < nimages; i++ )
{
int npt = (int)imagePoints[0][i].size();
Mat imgpt[2];
for( k = 0; k < 2; k++ )
{
imgpt[k] = Mat(imagePoints[k][i]);
undistortPoints(imgpt[k], imgpt[k], cameraMatrix[k], distCoeffs[k], Mat(), cameraMatrix[k]);
computeCorrespondEpilines(imgpt[k], k+1, F, lines[k]);
}
for( j = 0; j < npt; j++ )
{
double errij = fabs(imagePoints[0][i][j].x*lines[1][j][0] +
imagePoints[0][i][j].y*lines[1][j][1] + lines[1][j][2]) +
fabs(imagePoints[1][i][j].x*lines[0][j][0] +
imagePoints[1][i][j].y*lines[0][j][1] + lines[0][j][2]);
err += errij;
}
npoints += npt;
}
cout << "average reprojection err = " << err/npoints << endl;
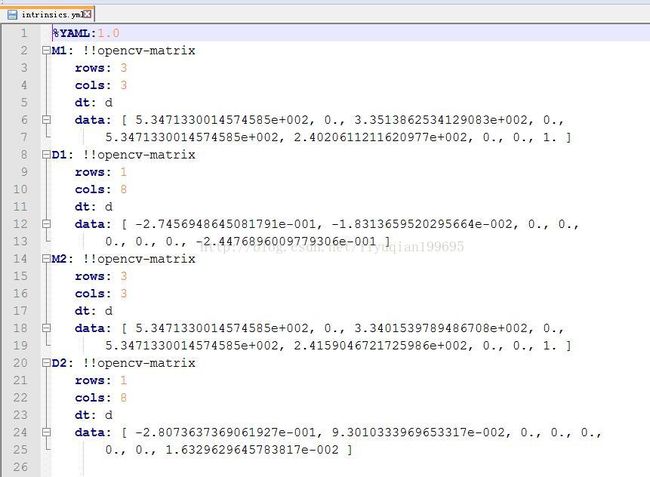
// save intrinsic parameters
FileStorage fs("intrinsics.yml", CV_STORAGE_WRITE);
if( fs.isOpened() )
{
fs << "M1" << cameraMatrix[0] << "D1" << distCoeffs[0] <<
"M2" << cameraMatrix[1] << "D2" << distCoeffs[1];
fs.release();
}
else
cout << "Error: can not save the intrinsic parameters\n";
Mat R1, R2, P1, P2, Q;
Rect validRoi[2];
stereoRectify(cameraMatrix[0], distCoeffs[0],
cameraMatrix[1], distCoeffs[1],
imageSize, R, T, R1, R2, P1, P2, Q,
CALIB_ZERO_DISPARITY, 1, imageSize, &validRoi[0], &validRoi[1]);
fs.open("extrinsics.yml", CV_STORAGE_WRITE);
if( fs.isOpened() )
{
fs << "R" << R << "T" << T << "R1" << R1 << "R2" << R2 << "P1" << P1 << "P2" << P2 << "Q" << Q;
fs.release();
}
else
cout << "Error: can not save the intrinsic parameters\n";
// OpenCV can handle left-right
// or up-down camera arrangements
bool isVerticalStereo = fabs(P2.at(1, 3)) > fabs(P2.at(0, 3));
// COMPUTE AND DISPLAY RECTIFICATION
if( !showRectified )
return;
Mat rmap[2][2];
// IF BY CALIBRATED (BOUGUET'S METHOD)
if( useCalibrated )
{
// we already computed everything
}
// OR ELSE HARTLEY'S METHOD
else
// use intrinsic parameters of each camera, but
// compute the rectification transformation directly
// from the fundamental matrix
{
vector allimgpt[2];
for( k = 0; k < 2; k++ )
{
for( i = 0; i < nimages; i++ )
std::copy(imagePoints[k][i].begin(), imagePoints[k][i].end(), back_inserter(allimgpt[k]));
}
F = findFundamentalMat(Mat(allimgpt[0]), Mat(allimgpt[1]), FM_8POINT, 0, 0);
Mat H1, H2;
stereoRectifyUncalibrated(Mat(allimgpt[0]), Mat(allimgpt[1]), F, imageSize, H1, H2, 3);
R1 = cameraMatrix[0].inv()*H1*cameraMatrix[0];
R2 = cameraMatrix[1].inv()*H2*cameraMatrix[1];
P1 = cameraMatrix[0];
P2 = cameraMatrix[1];
}
//Precompute maps for cv::remap()
initUndistortRectifyMap(cameraMatrix[0], distCoeffs[0], R1, P1, imageSize, CV_16SC2, rmap[0][0], rmap[0][1]);
initUndistortRectifyMap(cameraMatrix[1], distCoeffs[1], R2, P2, imageSize, CV_16SC2, rmap[1][0], rmap[1][1]);
Mat canvas;
double sf;
int w, h;
if( !isVerticalStereo )
{
sf = 600./MAX(imageSize.width, imageSize.height);
w = cvRound(imageSize.width*sf);
h = cvRound(imageSize.height*sf);
canvas.create(h, w*2, CV_8UC3);
}
else
{
sf = 300./MAX(imageSize.width, imageSize.height);
w = cvRound(imageSize.width*sf);
h = cvRound(imageSize.height*sf);
canvas.create(h*2, w, CV_8UC3);
}
for( i = 0; i < nimages; i++ )
{
for( k = 0; k < 2; k++ )
{
Mat img = imread(goodImageList[i*2+k], 0), rimg, cimg;
remap(img, rimg, rmap[k][0], rmap[k][1], CV_INTER_LINEAR);
cvtColor(rimg, cimg, COLOR_GRAY2BGR);
Mat canvasPart = !isVerticalStereo ? canvas(Rect(w*k, 0, w, h)) : canvas(Rect(0, h*k, w, h));
resize(cimg, canvasPart, canvasPart.size(), 0, 0, CV_INTER_AREA);
if( useCalibrated )
{
Rect vroi(cvRound(validRoi[k].x*sf), cvRound(validRoi[k].y*sf),
cvRound(validRoi[k].width*sf), cvRound(validRoi[k].height*sf));
rectangle(canvasPart, vroi, Scalar(0,0,255), 3, 8);
}
}
if( !isVerticalStereo )
for( j = 0; j < canvas.rows; j += 16 )
line(canvas, Point(0, j), Point(canvas.cols, j), Scalar(0, 255, 0), 1, 8);
else
for( j = 0; j < canvas.cols; j += 16 )
line(canvas, Point(j, 0), Point(j, canvas.rows), Scalar(0, 255, 0), 1, 8);
imshow("rectified", canvas);
char c = (char)waitKey();
if( c == 27 || c == 'q' || c == 'Q' )
break;
}
}
static bool readStringList( const string& filename, vector& l )
{
l.resize(0);
FileStorage fs(filename, FileStorage::READ);
if( !fs.isOpened() )
return false;
FileNode n = fs.getFirstTopLevelNode();
if( n.type() != FileNode::SEQ )
return false;
FileNodeIterator it = n.begin(), it_end = n.end();
for( ; it != it_end; ++it )
l.push_back((string)*it);
return true;
}
int main(int argc, char** argv)
{
Size boardSize;
string imagelistfn;
bool showRectified = true;
/* for( int i = 1; i < argc; i++ )
{
if( string(argv[i]) == "-w" )
{
if( sscanf(argv[++i], "%d", &boardSize.width) != 1 || boardSize.width <= 0 )
{
cout << "invalid board width" << endl;
return print_help();
}
}
else if( string(argv[i]) == "-h" )
{
if( sscanf(argv[++i], "%d", &boardSize.height) != 1 || boardSize.height <= 0 )
{
cout << "invalid board height" << endl;
return print_help();
}
}
else if( string(argv[i]) == "-nr" )
showRectified = false;
else if( string(argv[i]) == "--help" )
return print_help();
else if( argv[i][0] == '-' )
{
cout << "invalid option " << argv[i] << endl;
return 0;
}
else
imagelistfn = argv[i];
}*/
if( imagelistfn == "" )
{
imagelistfn = "stereo_calib.xml"; //图片列表文件
boardSize = Size(9, 6);
}
else if( boardSize.width <= 0 || boardSize.height <= 0 )
{
cout << "if you specified XML file with chessboards, you should also specify the board width and height (-w and -h options)" << endl;
return 0;
}
vector imagelist;
bool ok = readStringList(imagelistfn, imagelist);
if(!ok || imagelist.empty())
{
cout << "can not open " << imagelistfn << " or the string list is empty" << endl;
return print_help();
}
StereoCalib(imagelist, boardSize, true, showRectified);
return 0;
}
2、实验结果
(1)原图像

(2)效果图



3、函数介绍
(1)findChessboardCorners
查找棋盘格内角点位置
C++: bool findChessboardCorners(InputArray image, Size patternSize, OutputArray corners, int flags=CALIB_CB_ADAPTIVE_THRESH+CALIB_CB_NORMALIZE_IMAGE )
参数:image:输入的棋盘图,必须是8位的灰度或者彩色图像。
pattern_size:棋盘图中每行和每列角点的个数。
corners:检测到的角点
flags:各种操作标志,可以是0或者下面值的组合:
- CV_CALIB_CB_ADAPTIVE_THRESH - 使用自适应阈值(通过平均图像亮度计算得到)将图像转换为黑白图,而不是一个固定的阈值。
- CV_CALIB_CB_NORMALIZE_IMAGE - 在利用固定阈值或者自适应的阈值进行二值化之前,先使用cvNormalizeHist来均衡化图像亮度。
- CV_CALIB_CB_FILTER_QUADS - 使用其他的准则(如轮廓面积,周长,方形形状)来去除在轮廓检测阶段检测到的错误方块。
Sample usage of detecting and drawing chessboard corners:
Size patternsize(8,6); //interior number of corners Mat gray = ....; //source image vectorcorners; //this will be filled by the detected corners //CALIB_CB_FAST_CHECK saves a lot of time on images //that do not contain any chessboard corners bool patternfound = findChessboardCorners(gray, patternsize, corners, CALIB_CB_ADAPTIVE_THRESH + CALIB_CB_NORMALIZE_IMAGE + CALIB_CB_FAST_CHECK); if(patternfound) cornerSubPix(gray, corners, Size(11, 11), Size(-1, -1), TermCriteria(CV_TERMCRIT_EPS + CV_TERMCRIT_ITER, 30, 0.1)); drawChessboardCorners(img, patternsize, Mat(corners), patternfound);
(2)drawChessboardCorners
呈现发现棋盘格角点。
C++: void drawChessboardCorners(InputOutputArray image, Size patternSize, InputArray corners, bool patternWasFound)
参数:
- image:输入的单幅图像,必须为8-bit的灰度图像。
- patternSize :棋盘格每行每列的交点个数
- corners:角点的坐标,findChessboardCorners()的输出。
- patternWasFound:角点是否全部找到的标志,findChessboardCorners()的返回值应给传给它。
(3)cornerSubPix
精确角点的位置。
C++: void cornerSubPix(InputArray image, InputOutputArray corners, Size winSize, Size zeroZone, TermCriteria criteria)
参数:
- image:输入图像。
- corners:初始输入角点的坐标和精确坐标用于输出。
- winSize:搜索窗口的长度的一半。如果:winSize=Size(5,5),那么大小为5*2+1X5*2+1=11X11的搜索窗被用。
- zeroZone:搜索禁区,有时用于避免可能的自相关矩阵的奇异性。
- criteria:终止条件,达到criteria.maxCount将停止或者corner position moves by less than criteria.epsilon on some iteration.
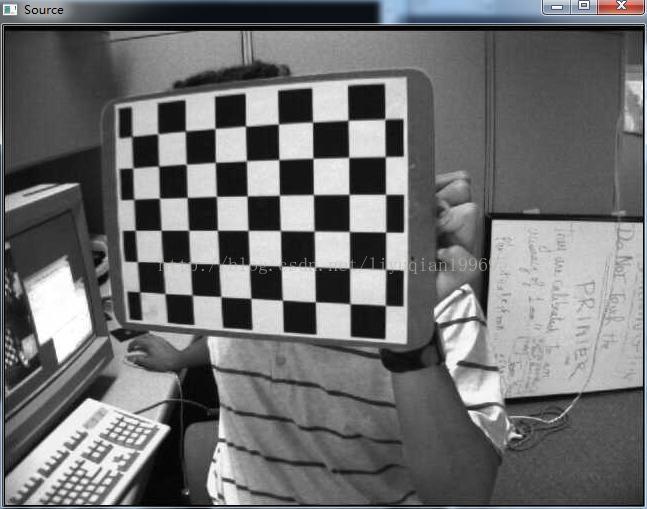
示例1.
代码:
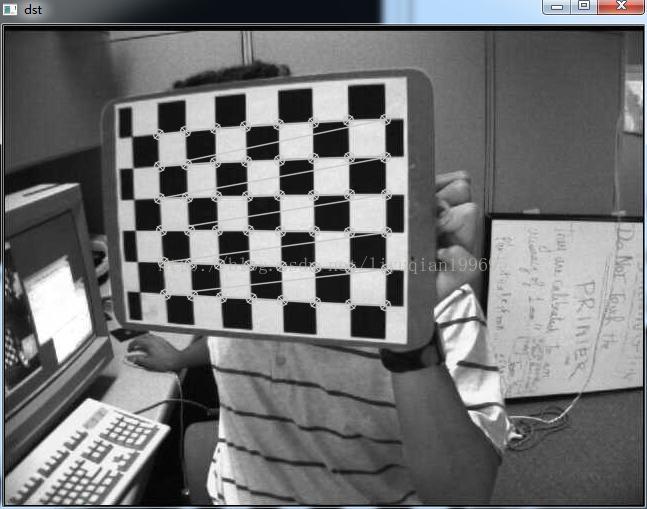
#include#include using namespace std; using namespace cv; int main() { Size patternsize(8,6); //interior number of corners Mat gray = imread("D:\\opencv\\sources\\samples\\cpp\\right01.jpg",0); //source image imshow("Source",gray); vector corners; //this will be filled by the detected corners //CALIB_CB_FAST_CHECK saves a lot of time on images //that do not contain any chessboard corners bool patternfound = findChessboardCorners(gray, patternsize, corners,CALIB_CB_ADAPTIVE_THRESH|CALIB_CB_NORMALIZE_IMAGE); if(patternfound) cornerSubPix(gray, corners, Size(11, 11), Size(-1, -1),TermCriteria(CV_TERMCRIT_EPS + CV_TERMCRIT_ITER, 30, 0.1)); drawChessboardCorners(gray, patternsize, Mat(corners), patternfound); imshow("dst",gray); waitKey(0); return 0; }
效果:
(4)stereoCalibrate
校定立体相机。
C++: double stereoCalibrate(InputArrayOfArrays objectPoints, InputArrayOfArrays imagePoints1, InputArrayOfArrays imagePoints2,
InputOutputArray cameraMatrix1, InputOutputArray distCoeffs1, InputOutputArray cameraMatrix2, InputOutputArray distCoeffs2,
Size imageSize, OutputArray R, OutputArray T, OutputArray E, OutputArray F,
TermCriteria criteria=TermCriteria(TermCriteria::COUNT+TermCriteria::EPS, 30, 1e-6), int flags=CALIB_FIX_INTRINSIC )
(5)undistortPoints
从观察到的点坐标计算理想的点坐标。
C++: void undistortPoints(InputArray src, OutputArray dst, InputArray cameraMatrix, InputArray distCoeffs,
InputArray R=noArray(), InputArray P=noArray())
参数:
- src:观测的点坐标, 1xN或者Nx1 2-channel (CV_32FC2 or CV_64FC2).
- dst:输出理想点坐标. 如果矩阵P 是 identity或者省略, dst将包含归一化点坐标.
- cameraMatrix:相机矩阵。
.
- distCoeffs :输入畸变系数向量
 of 4, 5, or 8 elements.如果向量是 NULL/empty, 零畸变系数b被假定。
of 4, 5, or 8 elements.如果向量是 NULL/empty, 零畸变系数b被假定。 - R : 在对象空间的矫正转换(3x3 矩阵). R1或者R2 由stereoRectify()计算可以传递到这.如果矩阵是空的,使用的恒等变换.
- P – 新的相机矩阵(3x3)或者新的投影矩阵 (3x4). P1 或者 P2 由stereoRectify()就算 can be passed here. 如果矩阵为空, the identity new camera matrix is used.
(6)computeCorrespondEpilines
为一幅图像中的点计算其在另一幅图像中对应的对极线。
C++: void computeCorrespondEpilines(InputArray points, int whichImage, InputArray F, OutputArray lines)
参数:
- points :输入点,是2xN 或者 3xN 数组 (N为点的个数)
- whichImage : 包含点的图像指数(1 or 2).
- F:基本矩阵可以被评估,用 findFundamentalMat() or stereoRectify() .
- lines –输出在其他图像对应点极线向量 。每条线 ax + by + c=0 .
(7)stereoRectify
Computes rectification transforms for each head of a calibrated stereo camera.
C++: void stereoRectify(InputArray cameraMatrix1, InputArray distCoeffs1, InputArray cameraMatrix2,
InputArray distCoeffs2, Size imageSize, InputArray R, InputArray T, OutputArray R1,
OutputArray R2, OutputArray P1, OutputArray P2, OutputArray Q, int flags=CALIB_ZERO_DISPARITY,
double alpha=-1, Size newImageSize=Size(), Rect* validPixROI1=0, Rect* validPixROI2=0 )
(8)findFundamentalMat
由两幅图像中对应点计算出基本矩阵
C++: Mat findFundamentalMat(InputArray points1, InputArray points2, int method=FM_RANSAC,
double param1=3., double param2=0.99, OutputArray mask=noArray() )
(9)stereoRectifyUncalibrated
Computes a rectification transform for an uncalibrated stereo camera.
C++: bool stereoRectifyUncalibrated(InputArray points1, InputArray points2, InputArray F, Size imgSize,
OutputArray H1, OutputArray H2, double threshold=5 )
(10)initUndistortRectifyMap
Computes the undistortion and rectification transformation map.
C++: void initUndistortRectifyMap(InputArray cameraMatrix, InputArray distCoeffs, InputArray R,
InputArray newCameraMatrix, Size size, int m1type, OutputArray map1, OutputArray map2)