TM4C129建立FREERTOS工程
写下这篇教程的原因主要是自己当初学习TM4C129使用FREERTOS操作系统时,发现TI只提供了TM4C123G的移植工程而没有提供TM4C129的,并且网络上教程比较少,而且有很多的教程存在问题,因此把自己当初建立 FREERTOS操作系统的过程写成一个教程,供大家参考。
FREERTOS操作系统介绍
FREERTOS是免费的、自由的、不受约束的操作系统。
操作系统允许多个任务同时运行,这个叫做多任务,实际上,一个处理核心在某一个时刻只能运行一个任务,操作系统中任务调度器的责任就是决定在某一个时刻究竟运行哪个任务,任务调度在各个任务之间的切换非常快,这就给人们造成了同一个时刻有多个任务同时运行的错觉。
操作系统源码下载
进入FREERTOS官网下载源码
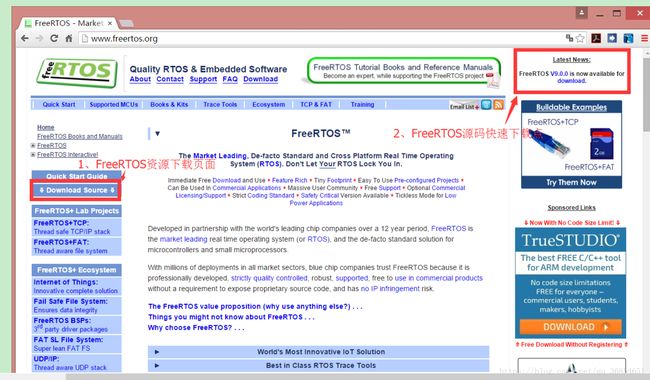
下载得到一个.exe文件,安装后实际上是一个文件夹,里面存放着FREERTOS的源码及一些相关的移植好的工程。

点开FREERTOS中的Source文件夹就是我们的FREERTOS源码了。

FREERTOS移植
一、添加源码
1.首先需要新建一个空白工程,详见TM4129新建工程
2.在工程中新建一个FREERTOS文件夹

3.将FREERTOS源码移植到该文件夹中

4.注意!portable文件夹只需要留下keil,MemMang和RVDS三个文件夹

二、在工程中添加文件
1.打开新建好的工程,新建分组FREERTOS_CORE和FREERTOS_PORTABLE,然后向这两个分组中添加文件

2.注意!这里heap_4.c是第四种内存管理办法,一共有5中内存管理办法,原理不同,各有利弊。
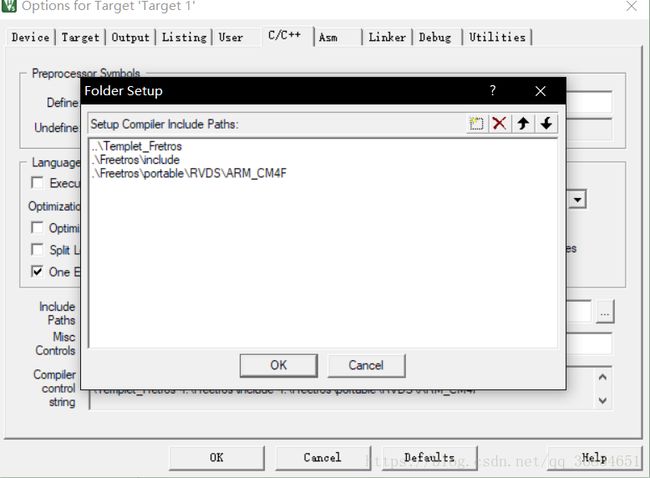
三、添加相应的头文件路径
1.添加完文件后,还要添加其源码的头文件路径
2.添加FreeRTOSConfig.h文件
在TM4123G提供的FREERTOS例程中可以找到该文件,我这里也可以提供一个链接
3.FreeRTOS里面有许多定义,包括系统时钟,滴答时钟等等,更多的详细说明可以参考原子资料FREERTOS开发手册
4.注意!开发手册里面提到了关于钩子函数编译错误的问题,我在实际开发中也遇到了此问题,文中提到了解决办法,请读者有机会一定要读一读这个开发手册,虽然此开发是针对STM32,但也只是在建立工程时有所区别,后面的学习都可以跟着此开发手册来。
四、修改Startup.s文件
Startup.s文件是系统的启动文件,主要包括堆和栈的初始化配置、中断向量表的配置以及将程序引导到main( )函数等。Startup.s主要完成三个工作:栈和堆的初始化、定位中断向量表、调用Reset Handler
有关Startup.s文件的介绍,推荐看下这篇博客
我们需要把文件修改为如下格式:
; <<< Use Configuration Wizard in Context Menu >>>
;******************************************************************************
;
; startup_rvmdk.S - Startup code for use with Keil's uVision.
;
; Copyright (c) 2013-2017 Texas Instruments Incorporated. All rights reserved.
; Software License Agreement
;
; Texas Instruments (TI) is supplying this software for use solely and
; exclusively on TI's microcontroller products. The software is owned by
; TI and/or its suppliers, and is protected under applicable copyright
; laws. You may not combine this software with "viral" open-source
; software in order to form a larger program.
;
; THIS SOFTWARE IS PROVIDED "AS IS" AND WITH ALL FAULTS.
; NO WARRANTIES, WHETHER EXPRESS, IMPLIED OR STATUTORY, INCLUDING, BUT
; NOT LIMITED TO, IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR
; A PARTICULAR PURPOSE APPLY TO THIS SOFTWARE. TI SHALL NOT, UNDER ANY
; CIRCUMSTANCES, BE LIABLE FOR SPECIAL, INCIDENTAL, OR CONSEQUENTIAL
; DAMAGES, FOR ANY REASON WHATSOEVER.
;
; This is part of revision 2.1.4.178 of the EK-TM4C1294XL Firmware Package.
;
;******************************************************************************
;******************************************************************************
;
; <o> Stack Size (in Bytes) <0x0-0xFFFFFFFF:8>
;
;******************************************************************************
Stack EQU 0x00000200
;******************************************************************************
;
; <o> Heap Size (in Bytes) <0x0-0xFFFFFFFF:8>
;
;******************************************************************************
Heap EQU 0x00000000
;******************************************************************************
;
; Allocate space for the stack.
;
;******************************************************************************
AREA STACK, NOINIT, READWRITE, ALIGN=3
StackMem
SPACE Stack
__initial_sp
;******************************************************************************
;
; Allocate space for the heap.
;
;******************************************************************************
AREA HEAP, NOINIT, READWRITE, ALIGN=3
__heap_base
HeapMem
SPACE Heap
__heap_limit
;******************************************************************************
;
; Indicate that the code in this file preserves 8-byte alignment of the stack.
;
;******************************************************************************
PRESERVE8
;******************************************************************************
;
; Place code into the reset code section.
;
;******************************************************************************
AREA RESET, CODE, READONLY
THUMB
;******************************************************************************
;
; External declarations for the interrupt handlers used by the application.
;
;******************************************************************************
EXTERN xPortPendSVHandler
EXTERN vPortSVCHandler
EXTERN xPortSysTickHandler
;******************************************************************************
;
; The vector table.
;
;******************************************************************************
EXPORT __Vectors
__Vectors
DCD StackMem + Stack ; Top of Stack
DCD Reset_Handler ; Reset Handler
DCD NmiSR ; NMI Handler
DCD FaultISR ; Hard Fault Handler
DCD IntDefaultHandler ; The MPU fault handler
DCD IntDefaultHandler ; The bus fault handler
DCD IntDefaultHandler ; The usage fault handler
DCD 0 ; Reserved
DCD 0 ; Reserved
DCD 0 ; Reserved
DCD 0 ; Reserved
DCD vPortSVCHandler ; SVCall handler
DCD IntDefaultHandler ; Debug monitor handler
DCD 0 ; Reserved
DCD xPortPendSVHandler ; The PendSV handler
DCD xPortSysTickHandler ; The SysTick handler
DCD IntDefaultHandler ; GPIO Port A
DCD IntDefaultHandler ; GPIO Port B
DCD IntDefaultHandler ; GPIO Port C
DCD IntDefaultHandler ; GPIO Port D
DCD IntDefaultHandler ; GPIO Port E
DCD IntDefaultHandler ; UART0 Rx and Tx
DCD IntDefaultHandler ; UART1 Rx and Tx
DCD IntDefaultHandler ; SSI0 Rx and Tx
DCD IntDefaultHandler ; I2C0 Master and Slave
DCD IntDefaultHandler ; PWM Fault
DCD IntDefaultHandler ; PWM Generator 0
DCD IntDefaultHandler ; PWM Generator 1
DCD IntDefaultHandler ; PWM Generator 2
DCD IntDefaultHandler ; Quadrature Encoder 0
DCD IntDefaultHandler ; ADC Sequence 0
DCD IntDefaultHandler ; ADC Sequence 1
DCD IntDefaultHandler ; ADC Sequence 2
DCD IntDefaultHandler ; ADC Sequence 3
DCD IntDefaultHandler ; Watchdog timer
DCD IntDefaultHandler ; Timer 0 subtimer A
DCD IntDefaultHandler ; Timer 0 subtimer B
DCD IntDefaultHandler ; Timer 1 subtimer A
DCD IntDefaultHandler ; Timer 1 subtimer B
DCD IntDefaultHandler ; Timer 2 subtimer A
DCD IntDefaultHandler ; Timer 2 subtimer B
DCD IntDefaultHandler ; Analog Comparator 0
DCD IntDefaultHandler ; Analog Comparator 1
DCD IntDefaultHandler ; Analog Comparator 2
DCD IntDefaultHandler ; System Control (PLL, OSC, BO)
DCD IntDefaultHandler ; FLASH Control
DCD IntDefaultHandler ; GPIO Port F
DCD IntDefaultHandler ; GPIO Port G
DCD IntDefaultHandler ; GPIO Port H
DCD IntDefaultHandler ; UART2 Rx and Tx
DCD IntDefaultHandler ; SSI1 Rx and Tx
DCD IntDefaultHandler ; Timer 3 subtimer A
DCD IntDefaultHandler ; Timer 3 subtimer B
DCD IntDefaultHandler ; I2C1 Master and Slave
DCD IntDefaultHandler ; Quadrature Encoder 1
DCD IntDefaultHandler ; CAN0
DCD IntDefaultHandler ; CAN1
DCD 0 ; Reserved
DCD 0 ; Reserved
DCD IntDefaultHandler ; Hibernate
DCD IntDefaultHandler ; USB0
DCD IntDefaultHandler ; PWM Generator 3
DCD IntDefaultHandler ; uDMA Software Transfer
DCD IntDefaultHandler ; uDMA Error
DCD IntDefaultHandler ; ADC1 Sequence 0
DCD IntDefaultHandler ; ADC1 Sequence 1
DCD IntDefaultHandler ; ADC1 Sequence 2
DCD IntDefaultHandler ; ADC1 Sequence 3
DCD 0 ; Reserved
DCD 0 ; Reserved
DCD IntDefaultHandler ; GPIO Port J
DCD IntDefaultHandler ; GPIO Port K
DCD IntDefaultHandler ; GPIO Port L
DCD IntDefaultHandler ; SSI2 Rx and Tx
DCD IntDefaultHandler ; SSI3 Rx and Tx
DCD IntDefaultHandler ; UART3 Rx and Tx
DCD IntDefaultHandler ; UART4 Rx and Tx
DCD IntDefaultHandler ; UART5 Rx and Tx
DCD IntDefaultHandler ; UART6 Rx and Tx
DCD IntDefaultHandler ; UART7 Rx and Tx
DCD 0 ; Reserved
DCD 0 ; Reserved
DCD 0 ; Reserved
DCD 0 ; Reserved
DCD IntDefaultHandler ; I2C2 Master and Slave
DCD IntDefaultHandler ; I2C3 Master and Slave
DCD IntDefaultHandler ; Timer 4 subtimer A
DCD IntDefaultHandler ; Timer 4 subtimer B
DCD 0 ; Reserved
DCD 0 ; Reserved
DCD 0 ; Reserved
DCD 0 ; Reserved
DCD 0 ; Reserved
DCD 0 ; Reserved
DCD 0 ; Reserved
DCD 0 ; Reserved
DCD 0 ; Reserved
DCD 0 ; Reserved
DCD 0 ; Reserved
DCD 0 ; Reserved
DCD 0 ; Reserved
DCD 0 ; Reserved
DCD 0 ; Reserved
DCD 0 ; Reserved
DCD 0 ; Reserved
DCD 0 ; Reserved
DCD 0 ; Reserved
DCD 0 ; Reserved
DCD IntDefaultHandler ; Timer 5 subtimer A
DCD IntDefaultHandler ; Timer 5 subtimer B
DCD IntDefaultHandler ; Wide Timer 0 subtimer A
DCD IntDefaultHandler ; Wide Timer 0 subtimer B
DCD IntDefaultHandler ; Wide Timer 1 subtimer A
DCD IntDefaultHandler ; Wide Timer 1 subtimer B
DCD IntDefaultHandler ; Wide Timer 2 subtimer A
DCD IntDefaultHandler ; Wide Timer 2 subtimer B
DCD IntDefaultHandler ; Wide Timer 3 subtimer A
DCD IntDefaultHandler ; Wide Timer 3 subtimer B
DCD IntDefaultHandler ; Wide Timer 4 subtimer A
DCD IntDefaultHandler ; Wide Timer 4 subtimer B
DCD IntDefaultHandler ; Wide Timer 5 subtimer A
DCD IntDefaultHandler ; Wide Timer 5 subtimer B
DCD IntDefaultHandler ; FPU
DCD 0 ; Reserved
DCD 0 ; Reserved
DCD IntDefaultHandler ; I2C4 Master and Slave
DCD IntDefaultHandler ; I2C5 Master and Slave
DCD IntDefaultHandler ; GPIO Port M
DCD IntDefaultHandler ; GPIO Port N
DCD IntDefaultHandler ; Quadrature Encoder 2
DCD 0 ; Reserved
DCD 0 ; Reserved
DCD IntDefaultHandler ; GPIO Port P (Summary or P0)
DCD IntDefaultHandler ; GPIO Port P1
DCD IntDefaultHandler ; GPIO Port P2
DCD IntDefaultHandler ; GPIO Port P3
DCD IntDefaultHandler ; GPIO Port P4
DCD IntDefaultHandler ; GPIO Port P5
DCD IntDefaultHandler ; GPIO Port P6
DCD IntDefaultHandler ; GPIO Port P7
DCD IntDefaultHandler ; GPIO Port Q (Summary or Q0)
DCD IntDefaultHandler ; GPIO Port Q1
DCD IntDefaultHandler ; GPIO Port Q2
DCD IntDefaultHandler ; GPIO Port Q3
DCD IntDefaultHandler ; GPIO Port Q4
DCD IntDefaultHandler ; GPIO Port Q5
DCD IntDefaultHandler ; GPIO Port Q6
DCD IntDefaultHandler ; GPIO Port Q7
DCD IntDefaultHandler ; GPIO Port R
DCD IntDefaultHandler ; GPIO Port S
DCD IntDefaultHandler ; PWM 1 Generator 0
DCD IntDefaultHandler ; PWM 1 Generator 1
DCD IntDefaultHandler ; PWM 1 Generator 2
DCD IntDefaultHandler ; PWM 1 Generator 3
DCD IntDefaultHandler ; PWM 1 Fault
;******************************************************************************
;
; This is the code that gets called when the processor first starts execution
; following a reset event.
;
;******************************************************************************
EXPORT Reset_Handler
Reset_Handler
;
; Enable the floating-point unit. This must be done here to handle the
; case where main() uses floating-point and the function prologue saves
; floating-point registers (which will fault if floating-point is not
; enabled). Any configuration of the floating-point unit using
; DriverLib APIs must be done here prior to the floating-point unit
; being enabled.
;
; Note that this does not use DriverLib since it might not be included
; in this project.
;
MOVW R0, #0xED88
MOVT R0, #0xE000
LDR R1, [R0]
ORR R1, #0x00F00000
STR R1, [R0]
;
; Call the C library enty point that handles startup. This will copy
; the .data section initializers from flash to SRAM and zero fill the
; .bss section.
;
IMPORT __main
B __main
;******************************************************************************
;
; This is the code that gets called when the processor receives a NMI. This
; simply enters an infinite loop, preserving the system state for examination
; by a debugger.
;
;******************************************************************************
NmiSR
B NmiSR
;******************************************************************************
;
; This is the code that gets called when the processor receives a fault
; interrupt. This simply enters an infinite loop, preserving the system state
; for examination by a debugger.
;
;******************************************************************************
FaultISR
B FaultISR
;******************************************************************************
;
; This is the code that gets called when the processor receives an unexpected
; interrupt. This simply enters an infinite loop, preserving the system state
; for examination by a debugger.
;
;******************************************************************************
IntDefaultHandler
B IntDefaultHandler
;******************************************************************************
;
; Make sure the end of this section is aligned.
;
;******************************************************************************
ALIGN
;******************************************************************************
;
; Some code in the normal code section for initializing the heap and stack.
;
;******************************************************************************
AREA |.text|, CODE, READONLY
;******************************************************************************
;
; The function expected of the C library startup code for defining the stack
; and heap memory locations. For the C library version of the startup code,
; provide this function so that the C library initialization code can find out
; the location of the stack and heap.
;
;******************************************************************************
IF :DEF: __MICROLIB
EXPORT __initial_sp
EXPORT __heap_base
EXPORT __heap_limit
ELSE
IMPORT __use_two_region_memory
EXPORT __user_initial_stackheap
__user_initial_stackheap
LDR R0, =HeapMem
LDR R1, =(StackMem + Stack)
LDR R2, =(HeapMem + Heap)
LDR R3, =StackMem
BX LR
ENDIF
;******************************************************************************
;
; Make sure the end of this section is aligned.
;
;******************************************************************************
ALIGN
;******************************************************************************
;
; Tell the assembler that we're done.
;
;******************************************************************************
END
这里面添加了许多外设以及和FREERTOS时钟控制有关的定义。有兴趣的可以研究一下。
五、修改代码
将代码修改如下
led.c:
//*****************************************************************************
//
// led_task.c - A simple flashing LED task.
//
// Copyright (c) 2012-2017 Texas Instruments Incorporated. All rights reserved.
// Software License Agreement
//
// Texas Instruments (TI) is supplying this software for use solely and
// exclusively on TI's microcontroller products. The software is owned by
// TI and/or its suppliers, and is protected under applicable copyright
// laws. You may not combine this software with "viral" open-source
// software in order to form a larger program.
//
// THIS SOFTWARE IS PROVIDED "AS IS" AND WITH ALL FAULTS.
// NO WARRANTIES, WHETHER EXPRESS, IMPLIED OR STATUTORY, INCLUDING, BUT
// NOT LIMITED TO, IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR
// A PARTICULAR PURPOSE APPLY TO THIS SOFTWARE. TI SHALL NOT, UNDER ANY
// CIRCUMSTANCES, BE LIABLE FOR SPECIAL, INCIDENTAL, OR CONSEQUENTIAL
// DAMAGES, FOR ANY REASON WHATSOEVER.
//
// This is part of revision 2.1.4.178 of the EK-TM4C123GXL Firmware Package.
//
//*****************************************************************************
#include main .c:
//*****************************************************************************
//
// blinky.c - Simple example to blink the on-board LED.
//
// Copyright (c) 2013-2017 Texas Instruments Incorporated. All rights reserved.
// Software License Agreement
//
// Texas Instruments (TI) is supplying this software for use solely and
// exclusively on TI's microcontroller products. The software is owned by
// TI and/or its suppliers, and is protected under applicable copyright
// laws. You may not combine this software with "viral" open-source
// software in order to form a larger program.
//
// THIS SOFTWARE IS PROVIDED "AS IS" AND WITH ALL FAULTS.
// NO WARRANTIES, WHETHER EXPRESS, IMPLIED OR STATUTORY, INCLUDING, BUT
// NOT LIMITED TO, IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR
// A PARTICULAR PURPOSE APPLY TO THIS SOFTWARE. TI SHALL NOT, UNDER ANY
// CIRCUMSTANCES, BE LIABLE FOR SPECIAL, INCIDENTAL, OR CONSEQUENTIAL
// DAMAGES, FOR ANY REASON WHATSOEVER.
//
// This is part of revision 2.1.4.178 of the EK-TM4C1294XL Firmware Package.
//
//*****************************************************************************
#include 编译下载即可。
最后,附上我自己完成好的工程。
例程