MATLAB特征点的检测与提取(2)
2,基于点特征匹配的杂乱场景目标检测
第一步:读入图片;
wahaha1 = imread('wahaha.jpg');
wahaha=rgb2gray(wahaha1);
scenceImage = imread('scence.jpg');
sceneImage=rgb2gray(scenceImage);
第二步:检测特征点;
boxPoints = detectSURFFeatures(wahaha);
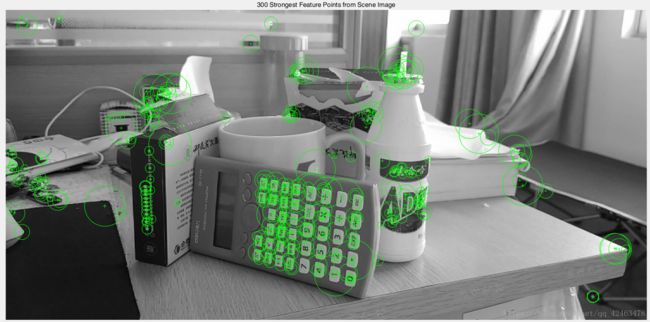
scenePoints = detectSURFFeatures(sceneImage);
figure;
imshow(wahaha);
title('100 Strongest Feature Points from wahaha Image');
hold on;
plot(selectStrongest(boxPoints, 100));
figure;
imshow(sceneImage);
title('300 Strongest Feature Points from Scene Image');
hold on;
plot(selectStrongest(scenePoints, 300));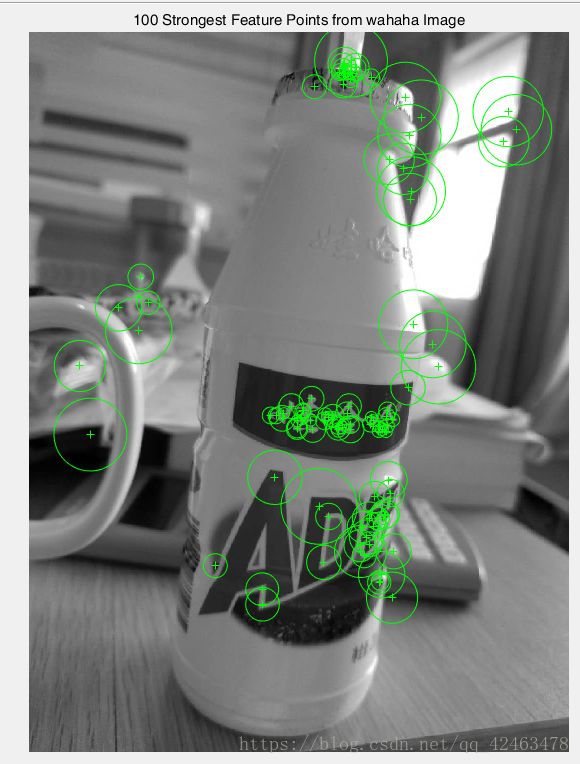
第三步:提取特征描述子;
boxPairs = matchFeatures(boxFeatures, sceneFeatures);第四步:显示假定匹配的特征;
matchedBoxPoints = boxPoints(boxPairs(:, 1), :);
matchedScenePoints = scenePoints(boxPairs(:, 2), :);
figure;
showMatchedFeatures(wahaha, sceneImage, matchedBoxPoints, ...
matchedScenePoints, 'montage');
title('Putatively Matched Points (Including Outliers)');
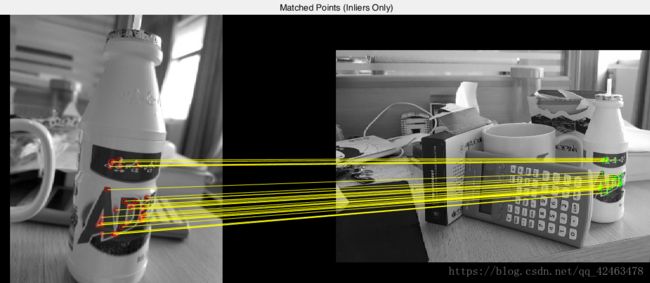
第五步:使用场景中假定匹配定位物体;
[tform, inlierBoxPoints, inlierScenePoints] = ...
estimateGeometricTransform(matchedBoxPoints, matchedScenePoints, 'affine');
figure;
showMatchedFeatures(wahaha, sceneImage, inlierBoxPoints, ...
inlierScenePoints, 'montage');
title('Matched Points (Inliers Only)');
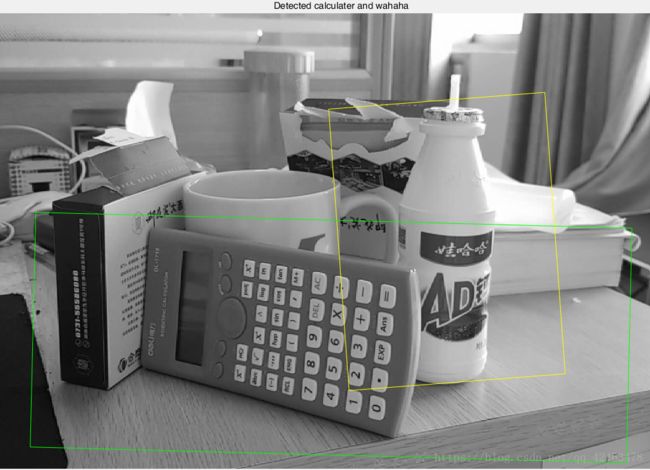
第六步:绘制定位框;
boxPolygon = [1, 1;... % top-left
size(wahaha, 2), 1;... % top-right
size(wahaha, 2), size(wahaha, 1);... % bottom-right
1, size(wahaha, 1);... % bottom-left
1, 1]; % top-left again to close the polygon
newBoxPolygon = transformPointsForward(tform, boxPolygon);
figure;
imshow(sceneImage);
hold on;
line(newBoxPolygon(:, 1), newBoxPolygon(:, 2), 'Color', 'y');
title('Detected Box');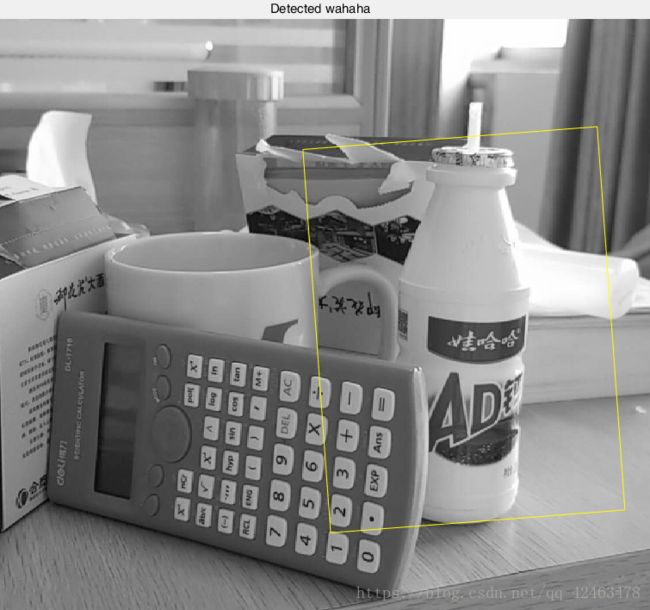
第七步:检测另外一个目标;
cup1Image = imread('cup.jpg');
cupImage=rgb2gray(cup1Image);
cupPoints = detectSURFFeatures(cupImage);
figure;
imshow(cupImage);
hold on;
plot(selectStrongest(cupPoints, 100));
title('100 Strongest Feature Points from cup Image');
% Extract feature descriptors.
[cupFeatures, cupPoints] = extractFeatures(cupImage, cupPoints);
% Match Features
cupPairs = matchFeatures(cupFeatures, sceneFeatures, 'MaxRatio', 0.9);
% Display putatively matched features.
matchedcupPoints = cupPoints(cupPairs(:, 1), :);
matchedScenePoints = scenePoints(cupPairs(:, 2), :);
figure;
showMatchedFeatures(cupImage, sceneImage, matchedcupPoints, ...
matchedScenePoints, 'montage');
title('Putatively Matched Points (Including Outliers)');
% Estimate Geometric Transformation and Eliminate Outliers
[tform, inlierElephantPoints, inlierScenePoints] = ...
estimateGeometricTransform(matchedcupPoints, matchedScenePoints, 'affine');
figure;
showMatchedFeatures(cupImage, sceneImage, inlierElephantPoints, ...
inlierScenePoints, 'montage');
title('Matched Points (Inliers Only)');
% Display Both Objects
cupPolygon = [1, 1;... % top-left
size(cupImage, 2), 1;... % top-right
size(cupImage, 2), size(cupImage, 1);... % bottom-right
1, size(cupImage, 1);... % bottom-left
1,1]; % top-left again to close the polygon
newcupPolygon = transformPointsForward(tform, cupPolygon);
figure;
imshow(sceneImage);
hold on;
line(newBoxPolygon(:, 1), newBoxPolygon(:, 2), 'Color', 'y');
line(newcupPolygon(:, 1), newcupPolygon(:, 2), 'Color', 'g');
title('Detected cup and Box');
displayEndOfDemoMessage(mfilename)