Pytorch学习笔记
此文为学习"莫烦Python"的Pytorch笔记
2.2 Variable变量
神经网络中的参数都是变量的形式,参数的更新是以Variable为基础的;Variable 需要从torch.autograd导入.;误差传播是根据Variable搭建的图来进行计算的,require_grad=True才计算变量节点的梯度.tensor无法反向传播,Variable才可以反向传播.
import torch
from torch.autograd import Variable # torch 中 Variable 模块
# 先生鸡蛋
tensor = torch.FloatTensor([[1,2],[3,4]])
# 把鸡蛋放到篮子里, requires_grad是参不参与误差反向传播, 要不要计算梯度
variable = Variable(tensor, requires_grad=True)
print(tensor)
"""
1 2
3 4
[torch.FloatTensor of size 2x2]
"""
print(variable)
t_out = torch.mean(tensor*tensor) # x^2
v_out = torch.mean(variable*variable) # x^2
print(t_out)
print(v_out) # 7.5
v_out.backward() # 模拟 v_out 的误差反向传递
# 下面两步看不懂没关系, 只要知道 Variable 是计算图的一部分, 可以用来传递误差就好.
# v_out = 1/4 * sum(variable*variable) 这是计算图中的 v_out 计算步骤
# 针对于 v_out 的梯度就是, d(v_out)/d(variable) = 1/4*2*variable = variable/2
print(variable.grad) # 初始 Variable 的梯度
'''
0.5000 1.0000
1.5000 2.0000
'''
因为v_out是从variable计算而来,所以通过v_out.backward()进行反向传播的时候也会计算到variable的梯度.
下面是variable包含的其他内容
print(variable) # Variable 形式
"""
Variable containing:
1 2
3 4
[torch.FloatTensor of size 2x2]
"""
print(variable.data) # tensor 形式
"""
1 2
3 4
[torch.FloatTensor of size 2x2]
"""
print(variable.data.numpy()) # numpy 形式
"""
[[ 1. 2.]
[ 3. 4.]]
"""
什么是激励函数?
通过激励函数可以使一些线性函数可以解决非线性问题
y=Wx -> y=AF(Wx)
其中的AF可以是relu函数,sigmoid函数,tanh函数
当神经网络的体量比较大的时候,激活函数的选取很重要,不合适的选择可能导致梯度爆炸等问题.
- 在少量层的结构中,我们可以尝试很多种的激励函数,在CNN中,推荐的是relu,在RNN中,推荐tanh和relu
3.1 Regression回归
造数据的代码中,使用torch.unsqueeze将一维的数据变成二维的数据,因为torch中只会处理二维数据.
import torch
from torch.autograd import Variable
import matplotlib.pyplot as plt
x = torch.unsqueeze(torch.linspace(-1, 1, 100), dim=1) # x data (tensor), shape=(100, 1)
y = x.pow(2) + 0.2*torch.rand(x.size()) # noisy y data (tensor), shape=(100, 1)
# # 画图
# plt.scatter(x.data.numpy(), y.data.numpy())
# plt.show()
x, y = Variable(x),Variable(y)
class Net(torch.nn.Module): # 继承 torch 的 Module
def __init__(self, n_feature, n_hidden, n_output):
super(Net, self).__init__() # 继承 __init__ 功能
# 定义每层用什么样的形式
self.hidden = torch.nn.Linear(n_feature, n_hidden) # 隐藏层线性输出
self.predict = torch.nn.Linear(n_hidden, n_output) # 输出层线性输出
def forward(self, x): # 这同时也是 Module 中的 forward 功能
# 正向传播输入值, 神经网络分析出输出值
x = F.relu(self.hidden(x)) # 激励函数(隐藏层的线性值)
x = self.predict(x) # 输出值
return x
net = Net(n_feature=1, n_hidden=10, n_output=1)
print(net) # net 的结构
- Net的class继承了torch的神经网络模块;每一个神经网络的模块都会包括__init__ 和 forward 两个函数;__init__存储搭建层所需要的信息,forward是神经网络前向传播的过程.
- __init__中需要继承Net的模块, 即super(Net, self).init();self.hiddend定义隐藏层,包含的信息为有多少个输入(n_features),有多少输出(n_hidden);self.predict定义输出层
- forward()中输入x,经过hidden layer之后输出n_hidden个数,然后再用relu激活函数激活(嵌套隐藏层输出的信息),这里的predict层没有使用激励函数是因为通常归回问题的值域范围很灵活,用了激励函数的话会限制输出值的范围
搭建了神经网络之后,就需要优化训练网络
# optimizer 是训练的工具
optimizer = torch.optim.SGD(net.parameters(), lr=0.2) # 传入 net 的所有参数, 学习率
loss_func = torch.nn.MSELoss() # 预测值和真实值的误差计算公式 (均方差)
for t in range(100):
prediction = net(x) # 喂给 net 训练数据 x, 输出预测值
loss = loss_func(prediction, y) # 计算两者的误差
optimizer.zero_grad() # 清空上一步的残余更新参数值
loss.backward() # 误差反向传播, 计算参数更新值
optimizer.step() # 将参数更新值施加到 net 的 parameters 上
- torch.optim子模块用于训练神经网络,最常用的有SGD(随机梯度下降)优化器来优化神经网络参数;其中需要传入神经网络的参数,即net.parameters,还需要给定学习率lr(一般小于1)
- loss_func是torch中计算误差的函数,这里使用MSELoss(均方差)
- t为训练步数,此处设置为100步;loss_func中的prediction为预测值,y为真实值(位置不能反)
- 接下来三步就是优化神经网络参数:首先使用optimizer.zero_grad()将神经网络参数的梯度全部降为0(因为每次计算梯度以后都会被保留);然后使用loss.backward()进行这一次的反向传递,计算出节点的梯度;optimizer.step()就以0.5的LR优化参数.
3.2 Classification分类
import torch
import torch.nn.functional as F
import matplotlib.pyplot as plt
# torch.manual_seed(1) # reproducible
# make fake data
n_data = torch.ones(100, 2)
x0 = torch.normal(2*n_data, 1) # class0 x data (tensor), shape=(100, 2)
y0 = torch.zeros(100) # class0 y data (tensor), shape=(100, 1)
x1 = torch.normal(-2*n_data, 1) # class1 x data (tensor), shape=(100, 2)
y1 = torch.ones(100) # class1 y data (tensor), shape=(100, 1)
x = torch.cat((x0, x1), 0).type(torch.FloatTensor) # shape (200, 2) FloatTensor = 32-bit floating
y = torch.cat((y0, y1), ).type(torch.LongTensor) # shape (200,) LongTensor = 64-bit integer
# The code below is deprecated in Pytorch 0.4. Now, autograd directly supports tensors
# x, y = Variable(x), Variable(y)
# plt.scatter(x.data.numpy()[:, 0], x.data.numpy()[:, 1], c=y.data.numpy(), s=100, lw=0, cmap='RdYlGn')
# plt.show()
class Net(torch.nn.Module):
def __init__(self, n_feature, n_hidden, n_output):
super(Net, self).__init__()
self.hidden = torch.nn.Linear(n_feature, n_hidden) # hidden layer
self.out = torch.nn.Linear(n_hidden, n_output) # output layer
def forward(self, x):
x = F.relu(self.hidden(x)) # activation function for hidden layer
x = self.out(x)
return x
net = Net(n_feature=2, n_hidden=10, n_output=2) # define the network
print(net) # net architecture
optimizer = torch.optim.SGD(net.parameters(), lr=0.02)
loss_func = torch.nn.CrossEntropyLoss() # the target label is NOT an one-hotted
plt.ion() # something about plotting
for t in range(100):
out = net(x) # input x and predict based on x
loss = loss_func(out, y) # must be (1. nn output, 2. target), the target label is NOT one-hotted
optimizer.zero_grad() # clear gradients for next train
loss.backward() # backpropagation, compute gradients
optimizer.step() # apply gradients
if t % 2 == 0:
# plot and show learning process
plt.cla()
prediction = torch.max(out, 1)[1]
pred_y = prediction.data.numpy()
target_y = y.data.numpy()
plt.scatter(x.data.numpy()[:, 0], x.data.numpy()[:, 1], c=pred_y, s=100, lw=0, cmap='RdYlGn')
accuracy = float((pred_y == target_y).astype(int).sum()) / float(target_y.size)
plt.text(1.5, -4, 'Accuracy=%.2f' % accuracy, fontdict={'size': 20, 'color': 'red'})
plt.pause(0.1)
plt.ioff()
plt.show()
注意与之前的差别,这里net = Net(n_feature=2, n_hidden=10, n_output=2)是输入两个特征,而之前是输入一个特征.
这里是多分类,所以使用CrossEntropyLoss()
经过net()输出的向量还不是概率值,可以通过**F.softmax()**转化为多分类的概率(相当于再套一层激活函数)
3.3 快速搭建法
import torch
import torch.nn.functional as F
# replace following class code with an easy sequential network
class Net(torch.nn.Module):
def __init__(self, n_feature, n_hidden, n_output):
super(Net, self).__init__()
self.hidden = torch.nn.Linear(n_feature, n_hidden) # hidden layer
self.predict = torch.nn.Linear(n_hidden, n_output) # output layer
def forward(self, x):
x = F.relu(self.hidden(x)) # activation function for hidden layer
x = self.predict(x) # linear output
return x
net1 = Net(1, 10, 1)
# easy and fast way to build your network
net2 = torch.nn.Sequential(
torch.nn.Linear(1, 10),
torch.nn.ReLU(),
torch.nn.Linear(10, 1)
)
print(net1) # net1 architecture
使用torch.nn.Sequential()可以快速搭建神经网络
如前所加的linear的神经层,可以使用torch.nn.Linear(1,10),指两个输入,隐藏层有十个神经元.
激励函数使用**torch.nn.ReLU()**添加即可
3.4 保存提取
import torch
import matplotlib.pyplot as plt
# torch.manual_seed(1) # reproducible
# fake data
x = torch.unsqueeze(torch.linspace(-1, 1, 100), dim=1) # x data (tensor), shape=(100, 1)
y = x.pow(2) + 0.2*torch.rand(x.size()) # noisy y data (tensor), shape=(100, 1)
# The code below is deprecated in Pytorch 0.4. Now, autograd directly supports tensors
# x, y = Variable(x, requires_grad=False), Variable(y, requires_grad=False)
def save():
# save net1
net1 = torch.nn.Sequential(
torch.nn.Linear(1, 10),
torch.nn.ReLU(),
torch.nn.Linear(10, 1)
)
optimizer = torch.optim.SGD(net1.parameters(), lr=0.5)
loss_func = torch.nn.MSELoss()
for t in range(100):
prediction = net1(x)
loss = loss_func(prediction, y)
optimizer.zero_grad()
loss.backward()
optimizer.step()
# plot result
plt.figure(1, figsize=(10, 3))
plt.subplot(131)
plt.title('Net1')
plt.scatter(x.data.numpy(), y.data.numpy())
plt.plot(x.data.numpy(), prediction.data.numpy(), 'r-', lw=5)
# 2 ways to save the net
torch.save(net1, 'net.pkl') # save entire net
torch.save(net1.state_dict(), 'net_params.pkl') # save only the parameters
def restore_net():
# restore entire net1 to net2
net2 = torch.load('net.pkl')
prediction = net2(x)
# plot result
plt.subplot(132)
plt.title('Net2')
plt.scatter(x.data.numpy(), y.data.numpy())
plt.plot(x.data.numpy(), prediction.data.numpy(), 'r-', lw=5)
def restore_params():
# restore only the parameters in net1 to net3
net3 = torch.nn.Sequential(
torch.nn.Linear(1, 10),
torch.nn.ReLU(),
torch.nn.Linear(10, 1)
)
# copy net1's parameters into net3
net3.load_state_dict(torch.load('net_params.pkl'))
prediction = net3(x)
# plot result
plt.subplot(133)
plt.title('Net3')
plt.scatter(x.data.numpy(), y.data.numpy())
plt.plot(x.data.numpy(), prediction.data.numpy(), 'r-', lw=5)
plt.show()
# save net1
save()
# restore entire net (may slow)
restore_net()
# restore only the net parameters
restore_params()
在save()函数中,首先搭建神经网络,训练好之后,就可以使用torch.save()保存神经网络,传入的参数是net1时保存的是整个神经网络,传入net1.state_dict()时保存的是模型的参数.此外还需要传入文件名,是".pkl"格式.
**restore_net()**是提取的第一种方法,直接使用torch.load()就可以读入模型.
restore_params()对应于存的是参数的情况,这种方法读模型时需要先按照模型本身的方式建立神经网络,然后使用.load_state_dict()读取之前保存的参数文件.
3.5 批数据处理
神经网络中的训练形式不只是把所有的训练一起完成,当数据量非常大时就可以使用批训练以提高训练速度和效率.
import torch
import torch.utils.data as Data
torch.manual_seed(1) # reproducible
BATCH_SIZE = 5
# BATCH_SIZE = 8
x = torch.linspace(1, 10, 10) # this is x data (torch tensor)
y = torch.linspace(10, 1, 10) # this is y data (torch tensor)
torch_dataset = Data.TensorDataset(x, y)
loader = Data.DataLoader(
dataset=torch_dataset, # torch TensorDataset format
batch_size=BATCH_SIZE, # mini batch size
shuffle=True, # random shuffle for training
num_workers=2, # subprocesses for loading data
)
def show_batch():
for epoch in range(3): # train entire dataset 3 times
for step, (batch_x, batch_y) in enumerate(loader): # for each training step
# train your data...
print('Epoch: ', epoch, '| Step: ', step, '| batch x: ',
batch_x.numpy(), '| batch y: ', batch_y.numpy())
if __name__ == '__main__':
show_batch()
从torch.utils.data中导入Data模块,
BATCH_SIZE定义每一批抽取的数据量.
Data.TensorDataset()定义一个数据集,传入参数data_tensor和target_tensor分别为数据张量和标签张量
Data.DataLoader()实现训练的分批
epoch指将整体的数据训练的次数.
在每一个epoch中,step表示训练的是第几部分.
当BATCH_SIZE选得比较大时,后面的step可能数据不够,那就会返回剩下的数据.
优化器 Optimizer
随着数据量增大,神经网络变复杂,计算量也会变得非常大.需要一些方法来加速神经网络的训练
最基础的方法是Stochastic Gradient Descent(SGD)
还有很多其它很快的加速方法.
3.6优化器 Optimizer
优化器的作用就是优化神经网络的参数
"""
View more, visit my tutorial page: https://morvanzhou.github.io/tutorials/
My Youtube Channel: https://www.youtube.com/user/MorvanZhou
Dependencies:
torch: 0.4
matplotlib
"""
import torch
import torch.utils.data as Data
import torch.nn.functional as F
import matplotlib.pyplot as plt
# torch.manual_seed(1) # reproducible
LR = 0.01
BATCH_SIZE = 32
EPOCH = 12
# fake dataset
x = torch.unsqueeze(torch.linspace(-1, 1, 1000), dim=1)
y = x.pow(2) + 0.1*torch.normal(torch.zeros(*x.size()))
# plot dataset
plt.scatter(x.numpy(), y.numpy())
plt.show()
# put dateset into torch dataset
torch_dataset = Data.TensorDataset(x, y)
loader = Data.DataLoader(dataset=torch_dataset, batch_size=BATCH_SIZE, shuffle=True, num_workers=2,)
# default network
class Net(torch.nn.Module):
def __init__(self):
super(Net, self).__init__()
self.hidden = torch.nn.Linear(1, 20) # hidden layer
self.predict = torch.nn.Linear(20, 1) # output layer
def forward(self, x):
x = F.relu(self.hidden(x)) # activation function for hidden layer
x = self.predict(x) # linear output
return x
if __name__ == '__main__':
# different nets
net_SGD = Net()
net_Momentum = Net()
net_RMSprop = Net()
net_Adam = Net()
nets = [net_SGD, net_Momentum, net_RMSprop, net_Adam]
# different optimizers
opt_SGD = torch.optim.SGD(net_SGD.parameters(), lr=LR)
opt_Momentum = torch.optim.SGD(net_Momentum.parameters(), lr=LR, momentum=0.8)
opt_RMSprop = torch.optim.RMSprop(net_RMSprop.parameters(), lr=LR, alpha=0.9)
opt_Adam = torch.optim.Adam(net_Adam.parameters(), lr=LR, betas=(0.9, 0.99))
optimizers = [opt_SGD, opt_Momentum, opt_RMSprop, opt_Adam]
loss_func = torch.nn.MSELoss()
losses_his = [[], [], [], []] # record loss
# training
for epoch in range(EPOCH):
print('Epoch: ', epoch)
for step, (b_x, b_y) in enumerate(loader): # for each training step
for net, opt, l_his in zip(nets, optimizers, losses_his):
output = net(b_x) # get output for every net
loss = loss_func(output, b_y) # compute loss for every net
opt.zero_grad() # clear gradients for next train
loss.backward() # backpropagation, compute gradients
opt.step() # apply gradients
l_his.append(loss.data.numpy()) # loss recoder
labels = ['SGD', 'Momentum', 'RMSprop', 'Adam']
for i, l_his in enumerate(losses_his):
plt.plot(l_his, label=labels[i])
plt.legend(loc='best')
plt.xlabel('Steps')
plt.ylabel('Loss')
plt.ylim((0, 0.2))
plt.show()
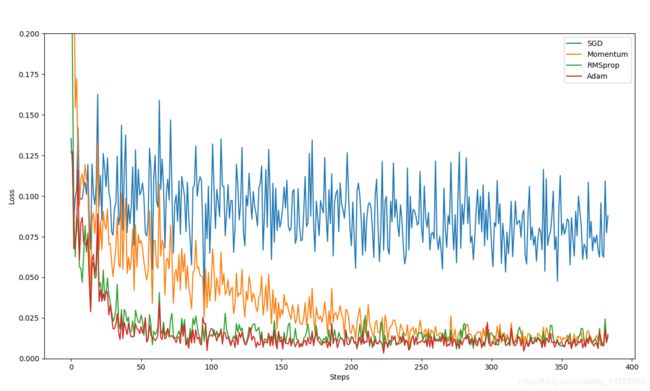
可以看到SGD相对还是比较慢的,可以尝试其它的算法,对应查其参数.
4.1 CNN 卷积神经网络
"""
View more, visit my tutorial page: https://morvanzhou.github.io/tutorials/
My Youtube Channel: https://www.youtube.com/user/MorvanZhou
Dependencies:
torch: 0.4
torchvision
matplotlib
"""
# library
# standard library
import os
# third-party library
import torch
import torch.nn as nn
import torch.utils.data as Data
import torchvision
import matplotlib.pyplot as plt
# torch.manual_seed(1) # reproducible
# Hyper Parameters
EPOCH = 1 # train the training data n times, to save time, we just train 1 epoch
BATCH_SIZE = 50
LR = 0.001 # learning rate
DOWNLOAD_MNIST = False
# Mnist digits dataset
if not(os.path.exists('./mnist/')) or not os.listdir('./mnist/'):
# not mnist dir or mnist is empyt dir
DOWNLOAD_MNIST = True
train_data = torchvision.datasets.MNIST(
root='./mnist/',
train=True, # this is training data
transform=torchvision.transforms.ToTensor(), # Converts a PIL.Image or numpy.ndarray to
# torch.FloatTensor of shape (C x H x W) and normalize in the range [0.0, 1.0]
download=DOWNLOAD_MNIST,
)
# plot one example
print(train_data.train_data.size()) # (60000, 28, 28)
print(train_data.train_labels.size()) # (60000)
plt.imshow(train_data.train_data[0].numpy(), cmap='gray')
plt.title('%i' % train_data.train_labels[0])
plt.show()
# Data Loader for easy mini-batch return in training, the image batch shape will be (50, 1, 28, 28)
train_loader = Data.DataLoader(dataset=train_data, batch_size=BATCH_SIZE, shuffle=True)
# pick 2000 samples to speed up testing
test_data = torchvision.datasets.MNIST(root='./mnist/', train=False)
test_x = torch.unsqueeze(test_data.test_data, dim=1).type(torch.FloatTensor)[:2000]/255. # shape from (2000, 28, 28) to (2000, 1, 28, 28), value in range(0,1)
test_y = test_data.test_labels[:2000]
class CNN(nn.Module):
def __init__(self):
super(CNN, self).__init__()
self.conv1 = nn.Sequential( # input shape (1, 28, 28)
nn.Conv2d(
in_channels=1, # input height
out_channels=16, # n_filters
kernel_size=5, # filter size
stride=1, # filter movement/step
padding=2, # if want same width and length of this image after Conv2d, padding=(kernel_size-1)/2 if stride=1
), # output shape (16, 28, 28)
nn.ReLU(), # activation
nn.MaxPool2d(kernel_size=2), # choose max value in 2x2 area, output shape (16, 14, 14)
)
self.conv2 = nn.Sequential( # input shape (16, 14, 14)
nn.Conv2d(16, 32, 5, 1, 2), # output shape (32, 14, 14)
nn.ReLU(), # activation
nn.MaxPool2d(2), # output shape (32, 7, 7)
)
self.out = nn.Linear(32 * 7 * 7, 10) # fully connected layer, output 10 classes
def forward(self, x):
x = self.conv1(x)
x = self.conv2(x)
x = x.view(x.size(0), -1) # flatten the output of conv2 to (batch_size, 32 * 7 * 7)
output = self.out(x)
return output, x # return x for visualization
cnn = CNN()
print(cnn) # net architecture
optimizer = torch.optim.Adam(cnn.parameters(), lr=LR) # optimize all cnn parameters
loss_func = nn.CrossEntropyLoss() # the target label is not one-hotted
# following function (plot_with_labels) is for visualization, can be ignored if not interested
from matplotlib import cm
try: from sklearn.manifold import TSNE; HAS_SK = True
except: HAS_SK = False; print('Please install sklearn for layer visualization')
def plot_with_labels(lowDWeights, labels):
plt.cla()
X, Y = lowDWeights[:, 0], lowDWeights[:, 1]
for x, y, s in zip(X, Y, labels):
c = cm.rainbow(int(255 * s / 9)); plt.text(x, y, s, backgroundcolor=c, fontsize=9)
plt.xlim(X.min(), X.max()); plt.ylim(Y.min(), Y.max()); plt.title('Visualize last layer'); plt.show(); plt.pause(0.01)
plt.ion()
# training and testing
for epoch in range(EPOCH):
for step, (b_x, b_y) in enumerate(train_loader): # gives batch data, normalize x when iterate train_loader
output = cnn(b_x)[0] # cnn output
loss = loss_func(output, b_y) # cross entropy loss
optimizer.zero_grad() # clear gradients for this training step
loss.backward() # backpropagation, compute gradients
optimizer.step() # apply gradients
if step % 50 == 0:
test_output, last_layer = cnn(test_x)
pred_y = torch.max(test_output, 1)[1].data.numpy()
accuracy = float((pred_y == test_y.data.numpy()).astype(int).sum()) / float(test_y.size(0))
print('Epoch: ', epoch, '| train loss: %.4f' % loss.data.numpy(), '| test accuracy: %.2f' % accuracy)
if HAS_SK:
# Visualization of trained flatten layer (T-SNE)
tsne = TSNE(perplexity=30, n_components=2, init='pca', n_iter=5000)
plot_only = 500
low_dim_embs = tsne.fit_transform(last_layer.data.numpy()[:plot_only, :])
labels = test_y.numpy()[:plot_only]
plot_with_labels(low_dim_embs, labels)
plt.ioff()
# print 10 predictions from test data
test_output, _ = cnn(test_x[:10])
pred_y = torch.max(test_output, 1)[1].data.numpy()
print(pred_y, 'prediction number')
print(test_y[:10].numpy(), 'real number')
torchvision中包含一些数据库
- 建立CNN网络的类中,self.conv1定义第一个卷积层,一般一个卷积网络的一层就包括nn.Conv2d()一个过滤器,一个激活函数,一个池化层.
nn.Conv2d()中的in_channels参数表示图片的通道数,out_channels是输出filter的个数;kernel_size定义filter的宽和高;stride表示filter跳跃的步长;padding看边缘填充的层数.
nn.MaxPool2d()建立池化层,kernel_size定义池化层的大小
self.out中定义一个线性输出层,nn.Linear()中的10代表输出的10个label;一开始图片的维度为12828,经过第一层之后变成了162828(因为使用了padding,所以长和宽没有变),经过第一层的池化层,长和宽减少一半,变成161414,再通过第二层的池化,长和宽又减少一半,最后变为3277.
在forward()函数中,x的尺寸会考虑batch,维度为(batch,32,7,7)通过view()来改变x的维度成batch327*7,使其输入到输出层
4.2 RNN 循环神经网络 分类
import torch
from torch import nn
import torchvision.datasets as dsets
import torchvision.transforms as transforms
import matplotlib.pyplot as plt
# torch.manual_seed(1) # reproducible
# Hyper Parameters
EPOCH = 1 # train the training data n times, to save time, we just train 1 epoch
BATCH_SIZE = 64
TIME_STEP = 28 # rnn time step / image height
INPUT_SIZE = 28 # rnn input size / image width
LR = 0.01 # learning rate
DOWNLOAD_MNIST = True # set to True if haven't download the data
# Mnist digital dataset
train_data = dsets.MNIST(
root='./mnist/',
train=True, # this is training data
transform=transforms.ToTensor(), # Converts a PIL.Image or numpy.ndarray to
# torch.FloatTensor of shape (C x H x W) and normalize in the range [0.0, 1.0]
download=DOWNLOAD_MNIST, # download it if you don't have it
)
# plot one example
print(train_data.train_data.size()) # (60000, 28, 28)
print(train_data.train_labels.size()) # (60000)
plt.imshow(train_data.train_data[0].numpy(), cmap='gray')
plt.title('%i' % train_data.train_labels[0])
plt.show()
# Data Loader for easy mini-batch return in training
train_loader = torch.utils.data.DataLoader(dataset=train_data, batch_size=BATCH_SIZE, shuffle=True)
# convert test data into Variable, pick 2000 samples to speed up testing
test_data = dsets.MNIST(root='./mnist/', train=False, transform=transforms.ToTensor())
test_x = test_data.test_data.type(torch.FloatTensor)[:2000]/255. # shape (2000, 28, 28) value in range(0,1)
test_y = test_data.test_labels.numpy()[:2000] # covert to numpy array
class RNN(nn.Module):
def __init__(self):
super(RNN, self).__init__()
self.rnn = nn.LSTM( # if use nn.RNN(), it hardly learns
input_size=INPUT_SIZE,
hidden_size=64, # rnn hidden unit
num_layers=1, # number of rnn layer
batch_first=True, # input & output will has batch size as 1s dimension. e.g. (batch, time_step, input_size)
)
self.out = nn.Linear(64, 10)
def forward(self, x):
# x shape (batch, time_step, input_size)
# r_out shape (batch, time_step, output_size)
# h_n shape (n_layers, batch, hidden_size)
# h_c shape (n_layers, batch, hidden_size)
r_out, (h_n, h_c) = self.rnn(x, None) # None represents zero initial hidden state
# choose r_out at the last time step
out = self.out(r_out[:, -1, :])
return out
rnn = RNN()
print(rnn)
optimizer = torch.optim.Adam(rnn.parameters(), lr=LR) # optimize all cnn parameters
loss_func = nn.CrossEntropyLoss() # the target label is not one-hotted
# training and testing
for epoch in range(EPOCH):
for step, (b_x, b_y) in enumerate(train_loader): # gives batch data
b_x = b_x.view(-1, 28, 28) # reshape x to (batch, time_step, input_size)
output = rnn(b_x) # rnn output
loss = loss_func(output, b_y) # cross entropy loss
optimizer.zero_grad() # clear gradients for this training step
loss.backward() # backpropagation, compute gradients
optimizer.step() # apply gradients
if step % 50 == 0:
test_output = rnn(test_x) # (samples, time_step, input_size)
pred_y = torch.max(test_output, 1)[1].data.numpy()
accuracy = float((pred_y == test_y).astype(int).sum()) / float(test_y.size)
print('Epoch: ', epoch, '| train loss: %.4f' % loss.data.numpy(), '| test accuracy: %.2f' % accuracy)
# print 10 predictions from test data
test_output = rnn(test_x[:10].view(-1, 28, 28))
pred_y = torch.max(test_output, 1)[1].data.numpy()
print(pred_y, 'prediction number')
print(test_y[:10], 'real number')
同样在最开始先定义一些超参数,如BATCH_SIZE批训练的数量,TIME_STEP和INPUT_SIZE都为28,因为每次读取图片的一行,总共读取28行。
使用nn.LSTM可以创建LSTM网络,·batch_first表示是batch成为第一个维度。
r_out, (h_n, h_c) = self.rnn(x, None)
在定义的forward函数中,传入的数据的shape(batch,time_step,input_size),完成每一个step的input。
r_out中会存储从第一步到最后一步的outout。
h_n, h_c表示返回的hidden_state,可以看作每学习一次,神经网络所学到的理解,下一个step再学习的时候,除了下一次的input就还需要传入这一次的hidden state。这里有两个hidden state,一个是分线程的,一个是主线程的。None表示首先的hidden state有没有。
最后的输出要选择最后一个output,self.out(r_out[:,-1,:])
4.3 RNN 循环神经网络(回归)
"""
View more, visit my tutorial page: https://morvanzhou.github.io/tutorials/
My Youtube Channel: https://www.youtube.com/user/MorvanZhou
Dependencies:
torch: 0.4
matplotlib
numpy
"""
import torch
from torch import nn
import numpy as np
import matplotlib.pyplot as plt
# torch.manual_seed(1) # reproducible
# Hyper Parameters
TIME_STEP = 10 # rnn time step
INPUT_SIZE = 1 # rnn input size
LR = 0.02 # learning rate
# show data
steps = np.linspace(0, np.pi*2, 100, dtype=np.float32) # float32 for converting torch FloatTensor
x_np = np.sin(steps)
y_np = np.cos(steps)
plt.plot(steps, y_np, 'r-', label='target (cos)')
plt.plot(steps, x_np, 'b-', label='input (sin)')
plt.legend(loc='best')
plt.show()
class RNN(nn.Module):
def __init__(self):
super(RNN, self).__init__()
self.rnn = nn.RNN(
input_size=INPUT_SIZE,
hidden_size=32, # rnn hidden unit
num_layers=1, # number of rnn layer
batch_first=True, # input & output will has batch size as 1s dimension. e.g. (batch, time_step, input_size)
)
self.out = nn.Linear(32, 1)
def forward(self, x, h_state):
# x (batch, time_step, input_size)
# h_state (n_layers, batch, hidden_size)
# r_out (batch, time_step, hidden_size)
r_out, h_state = self.rnn(x, h_state)
outs = [] # save all predictions
for time_step in range(r_out.size(1)): # calculate output for each time step
outs.append(self.out(r_out[:, time_step, :]))
return torch.stack(outs, dim=1), h_state
# instead, for simplicity, you can replace above codes by follows
# r_out = r_out.view(-1, 32)
# outs = self.out(r_out)
# outs = outs.view(-1, TIME_STEP, 1)
# return outs, h_state
# or even simpler, since nn.Linear can accept inputs of any dimension
# and returns outputs with same dimension except for the last
# outs = self.out(r_out)
# return outs
rnn = RNN()
print(rnn)
optimizer = torch.optim.Adam(rnn.parameters(), lr=LR) # optimize all cnn parameters
loss_func = nn.MSELoss()
h_state = None # for initial hidden state
plt.figure(1, figsize=(12, 5))
plt.ion() # continuously plot
for step in range(100):
start, end = step * np.pi, (step+1)*np.pi # time range
# use sin predicts cos
steps = np.linspace(start, end, TIME_STEP, dtype=np.float32, endpoint=False) # float32 for converting torch FloatTensor
x_np = np.sin(steps)
y_np = np.cos(steps)
x = torch.from_numpy(x_np[np.newaxis, :, np.newaxis]) # shape (batch, time_step, input_size)
y = torch.from_numpy(y_np[np.newaxis, :, np.newaxis])
prediction, h_state = rnn(x, h_state) # rnn output
# !! next step is important !!
h_state = h_state.data # repack the hidden state, break the connection from last iteration
loss = loss_func(prediction, y) # calculate loss
optimizer.zero_grad() # clear gradients for this training step
loss.backward() # backpropagation, compute gradients
optimizer.step() # apply gradients
# plotting
plt.plot(steps, y_np.flatten(), 'r-')
plt.plot(steps, prediction.data.numpy().flatten(), 'b-')
plt.draw(); plt.pause(0.05)
plt.ioff()
plt.show()