最完整相机标定过程(百度网盘源代码+工程分享)
相机标定步骤
1.准备好一系列用来相机标定的图片,将图片的路径信息存储到chess.txt文件内;
百度网盘链接图片及chess.txt文件,运行时将图片路径改到自己放置的路径:
链接:https://pan.baidu.com/s/1OLpD7csfKtjuEMCeP7yvMw
提取码:zxav
2. 对每张图片提取角点信息;
3. 由于角点信息不够精确,进一步提取亚像素角点信息;
4. 在图片中画出提取出的角点;
5. 相机标定;
6. 对标定结果评价,计算误差;
7. 使用标定结果对原图片进行矫正;
完整工程:
链接:https://pan.baidu.com/s/1zo-ZWKiRp22bqX2LCbSC9g
提取码:8ite
如下是源代码及注释:
#include
#include
#include
#include
#include
#include
#include
#include
using namespace std;
using namespace cv;
int main()
{
ifstream inImgPath("chess.txt");
//标定所用图像文件的路径 ifstream:in file从文件读取 ofstream:out file输出文件
//fstream 既可以读又可以写
vector imgList;
vector::iterator p;
string temp;
if (!inImgPath.is_open())
{
cout << "没有找到文件" << endl;
}
//读取文件中保存的图片文件路径,并存放在数组中
while (getline(inImgPath, temp))
{
imgList.push_back(temp);
}
ofstream fout("caliberation_result.txt"); //保存标定结果的文件
cout << "开始提取角点......" << endl;
cv::Size image_size;//保存图片大小
cv::Size pattern_size = cv::Size(4, 6);//标定板上每行、每列的角点数;测试图片中的标定板上内角点数为4*6
vector corner_points_buf;//建一个数组缓存检测到的角点,通常采用Point2f形式
vector::iterator corner_points_buf_ptr;
vector> corner_points_of_all_imgs;
int image_num = 0;
string filename;
while (image_num < imgList.size())
{
filename = imgList[image_num++];
cout << "image_num = " << image_num << endl;
cout << filename.c_str() << endl;
cv::Mat imageInput = cv::imread(filename.c_str());
if (image_num == 1)
{
image_size.width = imageInput.cols;
image_size.height = imageInput.rows;
cout << "image_size.width = " << image_size.width << endl;
cout << "image_size.height = " << image_size.height << endl;
}
if (findChessboardCorners(imageInput, pattern_size, corner_points_buf) == 0)
{
cout << "can not find chessboard corners!\n"; //找不到角点
exit(1);
}
else
{
cv::Mat gray;
cv::cvtColor(imageInput, gray, CV_RGB2GRAY);
cv::find4QuadCornerSubpix(gray, corner_points_buf, cv::Size(5, 5));
corner_points_of_all_imgs.push_back(corner_points_buf);
cv::drawChessboardCorners(gray, pattern_size, corner_points_buf, true);
cv::imshow("camera calibration", gray);
cv::waitKey(100);
}
}
int total = corner_points_of_all_imgs.size();
cout << "total=" << total << endl;
int cornerNum = pattern_size.width * pattern_size.height;//每张图片上的总的角点数
for (int i = 0; i < total; i++)
{
cout << "--> 第" << i + 1 << "幅图片的数据 -->:" << endl;
for (int j = 0; j < cornerNum; j++)
{
cout << "-->" << corner_points_of_all_imgs[i][j].x;
cout << "-->" << corner_points_of_all_imgs[i][j].y;
if ((j + 1) % 3 == 0)
{
cout << endl;
}
else
{
cout.width(10);
}
}
cout << endl;
}
cout << endl << "角点提取完成" << endl;
//摄像机标定
cout << "开始标定………………" << endl;
cv::Mat cameraMatrix = cv::Mat(3, 3, CV_32FC1, cv::Scalar::all(0));//内外参矩阵,H——单应性矩阵
cv::Mat distCoefficients = cv::Mat(1, 5, CV_32FC1, cv::Scalar::all(0));//摄像机的5个畸变系数:k1,k2,p1,p2,k3
vector tvecsMat;//每幅图像的平移向量,t
vector rvecsMat;//每幅图像的旋转向量(罗德里格旋转向量)
vector> objectPoints;//保存所有图片的角点的三维坐标
//初始化每一张图片中标定板上角点的三维坐标
int i, j, k;
for (k = 0; k < image_num; k++)//遍历每一张图片
{
vector tempCornerPoints;//每一幅图片对应的角点数组
//遍历所有的角点
for (i = 0; i < pattern_size.height; i++)
{
for (j = 0; j < pattern_size.width; j++)
{
cv::Point3f singleRealPoint;//一个角点的坐标
singleRealPoint.x = i * 10;
singleRealPoint.y = j * 10;
singleRealPoint.z = 0;//假设z=0
tempCornerPoints.push_back(singleRealPoint);
}
}
objectPoints.push_back(tempCornerPoints);
}
cv::calibrateCamera(objectPoints, corner_points_of_all_imgs, image_size, cameraMatrix, distCoefficients, rvecsMat, tvecsMat, 0);
cout << "标定完成" << endl;
//开始保存标定结果
cout << "开始保存标定结果" << endl;
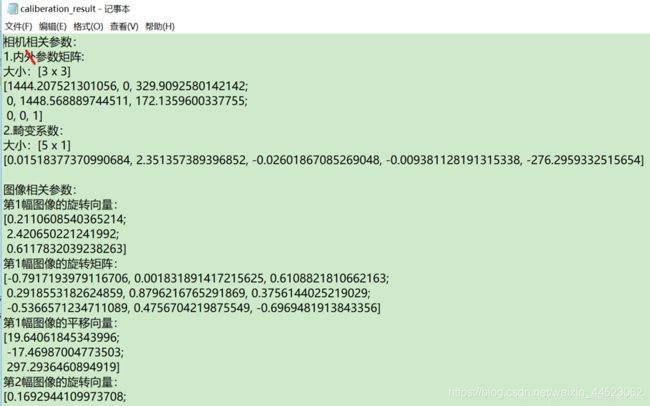
cout << endl << "相机相关参数:" << endl;
fout << "相机相关参数:" << endl;
cout << "1.内参数矩阵:" << endl;
fout << "1.内参数矩阵:" << endl;
cout << "大小:" << cameraMatrix.size() << endl;
fout << "大小:" << cameraMatrix.size() << endl;
cout << cameraMatrix << endl;
fout << cameraMatrix << endl;
cout << "2.畸变系数:" << endl;
fout << "2.畸变系数:" << endl;
cout << "大小:" << distCoefficients.size() << endl;
fout << "大小:" << distCoefficients.size() << endl;
cout << distCoefficients << endl;
fout << distCoefficients << endl;
cout << endl << "图像相关参数:" << endl;
fout << endl << "图像相关参数:" << endl;
cv::Mat rotation_Matrix = cv::Mat(3, 3, CV_32FC1, cv::Scalar::all(0));//旋转矩阵
for (i = 0; i < image_num; i++)
{
cout << "第" << i + 1 << "幅图像的旋转向量:" << endl;
fout << "第" << i + 1 << "幅图像的旋转向量:" << endl;
cout << rvecsMat[i] << endl;
fout << rvecsMat[i] << endl;
cout << "第" << i + 1 << "幅图像的旋转矩阵:" << endl;
fout << "第" << i + 1 << "幅图像的旋转矩阵:" << endl;
cv::Rodrigues(rvecsMat[i], rotation_Matrix);//将旋转向量转换为相对应的旋转矩阵
cout << rotation_Matrix << endl;
fout << rotation_Matrix << endl;
cout << "第" << i + 1 << "幅图像的平移向量:" << endl;
fout << "第" << i + 1 << "幅图像的平移向量:" << endl;
cout << tvecsMat[i] << endl;
fout << tvecsMat[i] << endl;
}
cout << "结果保存完毕" << endl;
//对标定结果进行评价
cout << "开始评价标定结果......" << endl;
//计算每幅图像中的角点数量,假设全部角点都检测到了
int corner_points_counts;
corner_points_counts = pattern_size.width * pattern_size.height;
cout << "每幅图像的标定误差:" << endl;
fout << "每幅图像的标定误差:" << endl;
double err = 0;//单张图像的误差
double total_err = 0;//所有图像的平均误差
for (i = 0; i < image_num; i++)
{
vector image_points_calculated;//存放新计算出的投影点的坐标
vector tempPointSet = objectPoints[i];
cv::projectPoints(tempPointSet, rvecsMat[i], tvecsMat[i], cameraMatrix, distCoefficients, image_points_calculated);
//计算新的投影点与旧的投影点之间的误差
vector image_points_old = corner_points_of_all_imgs[i];
//将两组数据换成Mat格式
cv::Mat image_points_calculated_mat = cv::Mat(1, image_points_calculated.size(), CV_32FC2);
cv::Mat image_points_old_mat = cv::Mat(1, image_points_old.size(), CV_32FC2);
for (j = 0; j < tempPointSet.size(); j++)
{
image_points_calculated_mat.at(0, j) = cv::Vec2f(image_points_calculated[j].x, image_points_calculated[j].y);
image_points_old_mat.at(0, j) = cv::Vec2f(image_points_old[j].x, image_points_old[j].y);
}
err = cv::norm(image_points_calculated_mat, image_points_old_mat, cv::NORM_L2);
err /= corner_points_counts;
total_err += err;
cout << "第" << i + 1 << "幅图像的平均误差:" << err << "像素" << endl;
fout << "第" << i + 1 << "幅图像的平均误差:" << err << "像素" << endl;
}
cout << "总体平均误差:" << total_err / image_num << "像素" << endl;
fout << "总体平均误差:" << total_err / image_num << "像素" << endl;
cout << "评价完成" << endl;
fout.close();
cv::Mat mapx = cv::Mat(image_size, CV_32FC1);
cv::Mat mapy = cv::Mat(image_size, CV_32FC1);
cv::Mat R = cv::Mat::eye(3, 3, CV_32F);
cout << "保存矫正图像" << endl;
string imageFileName;
std::stringstream StrStm;
for (int i = 0; i < image_num; i++)
{
cout << "Frame #" << i + 1 << endl;
cv::initUndistortRectifyMap(cameraMatrix, distCoefficients, R, cameraMatrix, image_size, CV_32FC1, mapx, mapy);
cv::Mat src_image = cv::imread(imgList[i].c_str(), 1);
cv::Mat new_image = src_image.clone();
cv::remap(src_image, new_image, mapx, mapy, cv::INTER_LINEAR);
imshow("原始图像", src_image);
imshow("矫正后图像", new_image);
StrStm.clear();
imageFileName.clear();
StrStm << i + 1;
StrStm >> imageFileName;
imageFileName += "_d.jpg";
cv::imwrite(imageFileName, new_image);
cv::waitKey(200);
}
cout << "保存结束" << endl;
cv::waitKey(0);
return 0;
}
如下是标定结果输出的caliberation_result文件
 (转载:https://blog.csdn.net/baidu_38172402/article/details/82558452)
(转载:https://blog.csdn.net/baidu_38172402/article/details/82558452)
坐标转换公式:
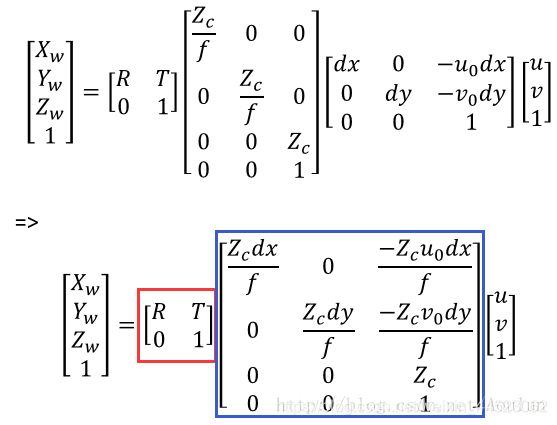
式中,红色的框框就表示相机的外参,可以看到,外参就是相机相对于世界坐标系的旋转和平移变换关系。内参是相机固有的属性,实际上就是焦距,像元尺寸。同时还可以看到,公式中有一个Zc,它表示物体离光学中心的距离。这也就说明,在标定的时候,如果物体在距离相机的不同位置,那么我们就必须在不同的位置对相机做标定。简单点来理解就是,当物体离相机远的时候,在图像上就很小,那么一个像素代表的实际尺寸就大,当物体离相机近的时候,那么成像效果就大,一个像素代表的实际物体尺寸就小。因此,对于每一个位置都需要去标定。
原则上,上述矩阵方程利用三张图获取各个匹配的特征点进行标定就可以得到内外参数解
但是为了更准确,一般选用15张,得到优化解,也就是如下第一种情况进行优化
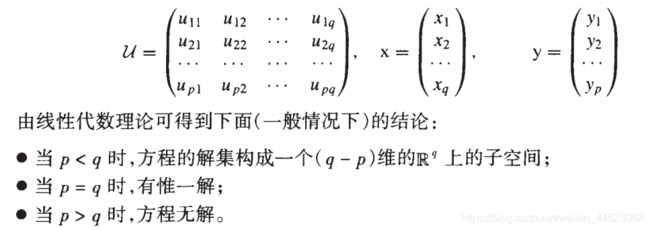
这里p是3,因为坐标x,y,z是3个未知数,假设我们用15张图片进行计算参数矩阵,则q是15。相当于3个未知数,15个方程去解,那肯定是多了(原本3个就够了,假设每个方程之间线性无关(不成比例)),3个方程足够。(这里我们其实求的是系数矩阵)
但是如果是15个的话,要都用到的话就得求最优解。类似与最小二乘法,一条直线本来两个点就决定了,但是现在有15个点,就要算拟合的最好的直线,使每个点到拟合直线的距离之和最小,那就得到最优的系数矩阵了