蓝桥杯嵌入式扩展板学习之LIS302DL
硬件电路


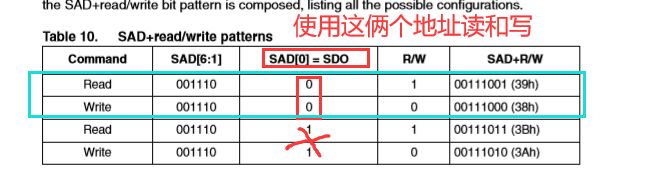
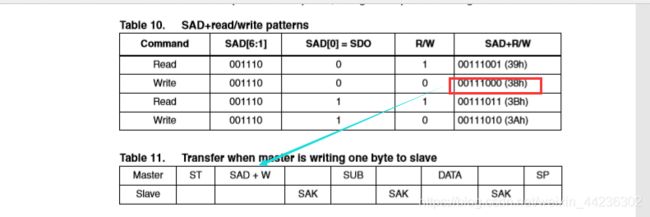
IIC通信的读和写地址的确定,类似24C02芯片一样有自己独特的读和写的iic地址,因为三轴加速度计的SD0管脚接地,根据芯片介绍,其Read地址为(0x39) write地址为(0x38)
 IIC读写函数
IIC读写函数

void LIS302DL_Write(unsigned char addr,unsigned char data)
{
I2CStart();
I2CSendByte(0x38);
I2CWaitAck();
I2CSendByte(addr);
I2CWaitAck();
I2CSendByte(data);
I2CWaitAck();
I2CStop();
}

uint8_t LIS302DL_Read(uint8_t addr)
{
unsigned char temp;
I2CStart();
I2CSendByte(0x38);
I2CWaitAck();
I2CSendByte(addr);
I2CWaitAck();
I2CStart();
I2CSendByte(0x39);
I2CWaitAck();
temp = I2CReceiveByte();
I2CSendNotAck();
I2CStop();
return(temp);
}
芯片初始化配置
#define CTRL_REG1 0x20
//#define CTRL_REG2 0x21
//#define CTRL_REG3 0x22
//#define FF_WU_THS_1 0x32
//#define FF_WU_DURATION_1 0x33
//#define FF_WU_CFG_1 0x30
//#define STATUS_REG 0x27
void LIS302DL_Config(void)
{
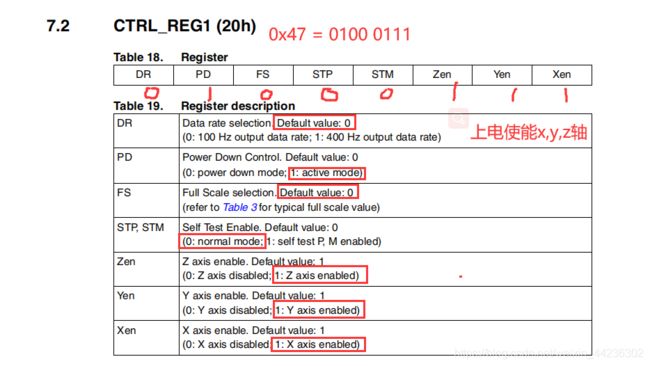
LIS302DL_Write(CTRL_REG1,0x47);
//DR=0,加速度的采集频率为 200Hz;
//PD=1,LIS302DL工作在普通功耗模式;
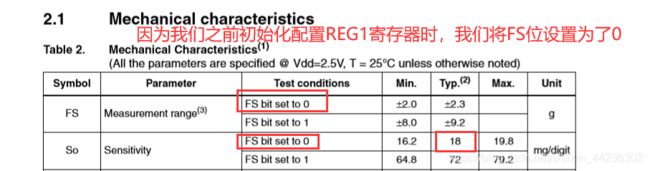
//FS=0,最大测量范围为 2g(2.3g),灵敏度为 18mg/LSB(16.2),受温度影响为 0.01%, 在0加速度时.飘移为 40mg;
//STP=0,STM=0,表示 LIS302DL 工作在普通模式,即非自检模式;
//Zen=1,表示使能 Z 轴方向加速度采集;
//Yen=1,表示使能 Y 轴方向加速度采集;
//Xen=1,表示使能 X 轴方向加速度采集;
//下面操作是对中断和高通滤波器等配置,我们不使用不用配置,就默认值即可
// LIS302DL_Write(CTRL_REG2,0x00);
//SIM=0,表示 SPI 口为 4 总线;(这个要先看cs决定)
//BOOT=0,表示不要刷新存储器的内容,为普通模式;
//FDS=0,表示禁用高通滤器;
//HP_FF_W_U2=0, 禁用自由落体/唤醒高通滤波器 2;
//HP_FF_W_U1=0, 禁用自由落体/唤醒高通滤波器 1;
//HP_coeff2=0,HP_coeff1=0,DR=0, 表示自由落体/唤醒高通滤波器的输出截止频率为 2Hz;
// LIS302DL_Write(CTRL_REG3,0xC1);
//IHL=1,表示在中断发生时,中断脚(INT1 和 INT2)输出低电平;
//PP_OD=1,表示中断脚开漏输出;
//I2CFG2=0,I2CFG1=0,I2CFG0=0,表示 INT2 脚输出低电平;
//I1CFG2=0,I1CFG1=0,I1CFG0=1,表示 INT1 脚是根据自由落体/唤醒 1 寄存器的输出而发生变化;
// LIS302DL_Write(FF_WU_THS_1,0x28);
//DCRM=0,表示在不再有中断发生时,持续时间计数器会被复位到初值;
//THS0~THS6,用来设置自由落体/唤醒的下限值--720mg;
// LIS302DL_Write(FF_WU_DURATION_1,40);
//当 DR=1 时,加速度的采集频率为 ;
// LIS302DL_Write(FF_WU_CFG_1,0x10);
//AOI=1,表示所有中断事件相或后输出;
//LIR=0,表示将中断请求不锁存;
//ZHIE=0,表示在 Z 输出寄存器的值大于 Z 轴的设置值时,将不会使能 Z 轴中断;
//ZLIE=1,表示在 Z 输出寄存器的值小于 Z 轴的设置值时,将不会使能 Z 轴中断;
//YHIE=0,表示在 Y 输出寄存器的值大于 Y 轴的设置值时,将不会使能 Y 轴中断;
//YLIE=1,表示在 Y 输出寄存器的值小于 Y 轴的设置值时,将不会使能 Y 轴中断;
//XHIE=1,表示在 X 输出寄存器的值大于 X 轴的设置值时,将不会使能 X 轴中断;
//XLIE=0,表示在 X 输出寄存器的值小于 X 轴的设置值时,将不会使能 X 轴中断;
}
三轴传感器输出数据


u8* Lis302DL_Output(void)
{
if((LIS302DL_Read(0x27) & 0x08) != 0) //判断X, Y ,Z是否有新数据更新
{
alz[0] = (LIS302DL_Read(0x29)); //x
alz[1] = (LIS302DL_Read(0x2B)); //y
alz[2] = (LIS302DL_Read(0x2D)); //z
}
return alz;
}
芯片鉴别 :可以不需要这个步骤


uint8_t LIS302DL_Check(void)
{
if(LIS302DL_Read(0x0f))
{
return 1;
}
else
{
return 0;
}
}
主函数
i2c_init();
LIS302DL_Config();
while(1)
{
ptr = Lis302DL_Output();
snprintf((char *)str, sizeof(str), " X Reg:%d ", ptr[0] / 18);
LCD_DisplayStringLine(Line6,str);
snprintf((char *)str, sizeof(str), " Y Reg:%d ", ptr[1] / 18);
LCD_DisplayStringLine(Line7,str);
snprintf((char *)str, sizeof(str), " Z Reg:%d ", ptr[2] / 18);
LCD_DisplayStringLine(Line8,str);
Delay_Ms(1000);
}
注意:这里为什么要 / 18,因为我们直接读取的数据是寄存器中的数据,不是我们的加速度,所以我们还要对寄存器中的数据根据自己选择的精度和灵敏度进行计算