快速相交检测:平面与包围盒
快速相交检测:平面与包围盒
- 1.前言
- 2.数学背景
- 3.计算原理
- 4.代码
1.前言
在游戏等实时性要求高的三维程序中,相交检测是一项及其基础又重要的技术,大佬们相继提出各种检测技术。
当然大多数人的实现方式可能 (确信)是将包围盒的8个点分别带入平面检测,这将要做8组点积。
今天我来介绍其中一项比较快速的检测方法,在略去相交和内部的判断后可以直接降到四次点积,当然如果使用的是AABB则会变成一次点积,目前我是按照OBB的方式来算的。
2.数学背景
平面方程形式: A x + B y + C z + D = 0 Ax+By+Cz+D =0 Ax+By+Cz+D=0
对于坐标 P ( x 0 , y 0 , z 0 ) P(x_0,y_0,z_0) P(x0,y0,z0)
检验其是否在平面内,可以直接带入平面方程
A x 0 + B y 0 + C z 0 + D Ax_0+By_0+Cz_0+D Ax0+By0+Cz0+D
- 若结果>0,则在平面外部。
- 若结果=0,则在正好在平面上。
- 若结果<0,则在平面内部。
什么?你问我平面还分内外?
这个我也无法解释,毕竟我只是一只鸽子
目前我个人来说,习惯性将平面法向量指向的那一侧称呼为外部,法向量负方向一侧称为内部
3.计算原理
最重要的步骤是找到包围盒的n顶点和p顶点。
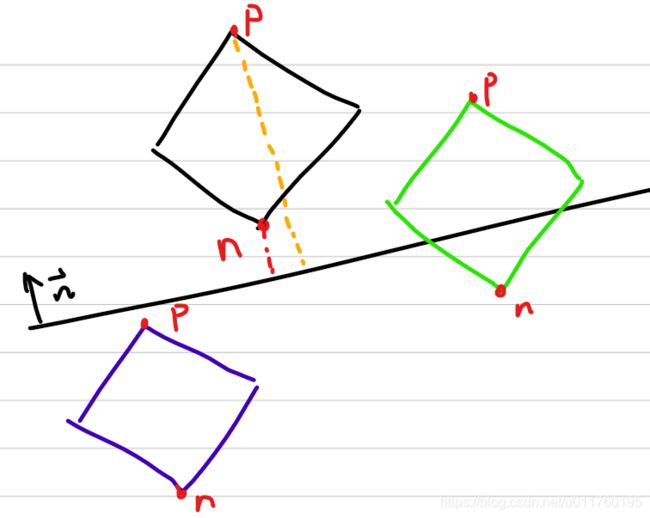
- 如果n顶点位于平面外部,则直接返回包围盒在平面外。
- 如果n顶点位于平面内部,p顶点位于平面外部,返回包围盒与平面相交。
- 如果n顶点位于平面内部,p顶点位于平面内部,返回包围盒在平面内。
那么n、p顶点如何寻找呢,通过将平面法向量与包围盒的轴方向进行点积,判断点积结果的正负来寻找。
4.代码
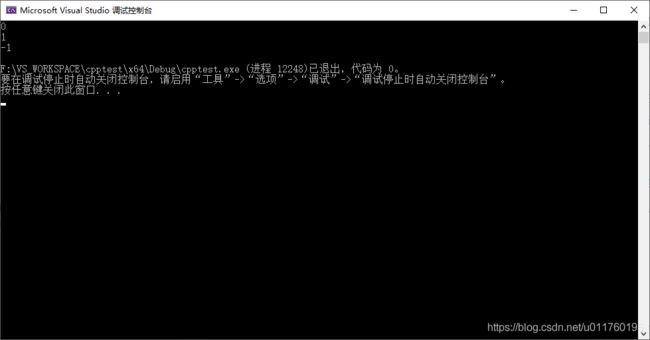
ok,按照惯例先放出结果图
- 0代表在外部
- 1代表相交
- -1代表在内部
测试用例包围盒为在点(0,0,0),长为(1,1,1),第一个轴方向为(1,0,0),第二个轴方向为(0,1,0),第二个轴方向为(0,0,1),对就是xyz轴方向
第一个是在点(2,2,2),法向量为(-1,-1,-1)的平面测试
第二个是在点(0.5,0.5,0.5),法向量为(-1,-1,-1)的平面测试
第三个是在点(-2,-2,-2),法向量为(-1,-1,-1)的平面测试
#include "pch.h"
#include