手把手教Linux驱动5-自旋锁、信号量、互斥体概述
在Linux系统中有大量的临界资源需要保护,如何让各个任务有条不紊的访问这些资源,这涉及到Linux中并发访问的保护机制设计相关知识。 后面会详细介绍这几个机制。
(据可靠消息,锁的实现经常出现在笔试环节。既可以考察面试者对锁的原理的理解,又可以考察面试者编程技能)。
注:部分代码都是根据ARM64架构汇编代码翻译成C语言并经过精简(例如:spin lock、read-write lock)。也有部分代码实现是为了呈现背后设计的原理自己编写的,而不是精简Linux中实现的代码(例如mutex)。
自旋锁(spin lock)
自旋锁是Linux中使用非常频繁的锁,原理简单。
内核当发生访问资源冲突的时候,可以有两种锁的解决方案选择:
- 一个是原地等待
- 一个是挂起当前进程,调度其他进程执行(睡眠)
Spinlock 是内核中提供的一种比较常见的锁机制,自旋锁是“原地等待”的方式解决资源冲突的,即,一个线程获取了一个自旋锁后,另外一个线程期望获取该自旋锁,获取不到,只能够原地“打转”(忙等待)。由于自旋锁的这个忙等待的特性,注定了它使用场景上的限制 —— 自旋锁不应该被长时间的持有(消耗 CPU 资源),一般应用在中断上下文。
原理
下面以去银行办业务为例来讲解。
- 银行的办事大厅一般会有几个窗口同步进行。今天很不巧,只有一个窗口提供服务。现在的银行服务都是采用取号排队,叫号服务的方式。
- 当你去银行办理业务的时候,首先会去取号机器领取小票,上面写着你排多少号。然后你就可以排队等待了。一般还会有个显示屏,上面会显示一个数字(例如:“请xxx号到1号窗口办理”),代表当前可以被服务顾客的排队号码。每办理完一个顾客的业务,显示屏上面的数字都会增加1。等待的顾客都会对比自己手上写的编号和显示屏上面是否一致,如果一致的话,就可以去前台办理业务了。
- 现在早上刚开业,顾客A是今天的第一个顾客,去取号机器领取0号(next计数)小票,然后看到显示屏上显示0(owner计数),顾客A就知道现在轮到自己办理业务了。
- 顾客A到前台办理业务(持有锁)中,顾客B来了。同样,顾客B去取号机器拿到1号(next计数)小票。然后乖乖的坐在旁边等候。顾客A依然在办理业务中,此时顾客C也来了。顾客C去取号机器拿到2号(next计数)小票。顾客C也乖乖的找个座位继续等待。
- 终于,顾客A的业务办完了(释放锁)。然后,显示屏上面显示1(owner计数)。顾客B和C都对比显示屏上面的数字和自己手中小票的数字是否相等。顾客B终于可以办理业务了(持有锁)。顾客C依然等待中。
- 顾客B的业务办完了(释放锁)。然后,显示屏上面显示2(owner计数)。顾客C终于开始办理业务(持有锁)。顾客C的业务办完了(释放锁)。
- 3个顾客都办完了业务离开了。只留下一个银行柜台服务员。
- 最终,显示屏上面显示3(owner计数)。取号机器的下一个排队号也是3号(next计数)。无人办理业务(锁是释放状态)。
Linux中针对每一个spin lock会有两个计数。分别是next和owner(初始值为0)。进程A申请锁时,会判断next和owner的值是否相等。如果相等就代表锁可以申请成功,否则原地自旋。直到owner和next的值相等才会退出自旋。假设进程A申请锁成功,然后会next加1。此时owner值为0,next值为1。进程B也申请锁,保存next得值到局部变量temp(temp = 1)中。由于next和owner值不相等,因此原地自旋读取owner的值,判断owner和temp是否相等,直到相等退出自旋状态。当然next的值还是加1,变成2。进程A释放锁,此时会将owner的值加1,那么此时B进程的owner和temp的值都是1,因此B进程获得锁。当B进程释放锁后,同样会将owner的值加1。最后owner和next都等于2,代表没有进程持有锁。next就是一个记录申请锁的次数,而owner是持有锁进程的计数值。
实际场景
一、考虑下面的场景(内核抢占场景):
(1)进程A在某个系统调用过程中访问了共享资源 R
(2)进程B在某个系统调用过程中也访问了共享资源 R
会不会造成冲突呢?假设在A访问共享资源R的过程中发生了中断,中断唤醒了沉睡中的,优先级更高的B,在中断返回现场的时候,发生进程切换,B启动执行,并通过系统调用访问了R,如果没有锁保护,则会出现两个thread进入临界区,导致程序执行不正确。OK,我们加上spin lock看看如何:A在进入临界区之前获取了spin lock,同样的,在A访问共享资源R的过程中发生了中断,中断唤醒了沉睡中的,优先级更高的B,B在访问临界区之前仍然会试图获取spin lock,这时候由于A进程持有spin lock而导致B进程进入了永久的spin……怎么破?linux的kernel很简单,在A进程获取spin lock的时候,禁止本CPU上的抢占(上面的永久spin的场合仅仅在本CPU的进程抢占本CPU的当前进程这样的场景中发生)。如果A和B运行在不同的CPU上,那么情况会简单一些:A进程虽然持有spin lock而导致B进程进入spin状态,不过由于运行在不同的CPU上,A进程会持续执行并会很快释放spin lock,解除B进程的spin状态
二、再考虑下面的场景(中断上下文场景):
(1)运行在CPU0上的进程A在某个系统调用过程中访问了共享资源 R
(2)运行在CPU1上的进程B在某个系统调用过程中也访问了共享资源 R
(3)外设P的中断handler中也会访问共享资源 R
在这样的场景下,使用spin lock可以保护访问共享资源R的临界区吗?我们假设CPU0上的进程A持有spin lock进入临界区,这时候,外设P发生了中断事件,并且调度到了CPU1上执行,看起来没有什么问题,执行在CPU1上的handler会稍微等待一会CPU0上的进程A,等它立刻临界区就会释放spin lock的,但是,如果外设P的中断事件被调度到了CPU0上执行会怎么样?CPU0上的进程A在持有spin lock的状态下被中断上下文抢占,而抢占它的CPU0上的handler在进入临界区之前仍然会试图获取spin lock,悲剧发生了,CPU0上的P外设的中断handler永远的进入spin状态,这时候,CPU1上的进程B也不可避免在试图持有spin lock的时候失败而导致进入spin状态。为了解决这样的问题,linux kernel采用了这样的办法:如果涉及到中断上下文的访问,spin lock需要和禁止本 CPU 上的中断联合使用。
三、再考虑下面的场景(底半部场景)
linux kernel中提供了丰富的bottom half的机制,虽然同属中断上下文,不过还是稍有不同。我们可以把上面的场景简单修改一下:外设P不是中断handler中访问共享资源R,而是在的bottom half中访问。使用spin lock+禁止本地中断当然是可以达到保护共享资源的效果,但是使用牛刀来杀鸡似乎有点小题大做,这时候disable bottom half就OK了
四、中断上下文之间的竞争
同一种中断handler之间在uni core和multi core上都不会并行执行,这是linux kernel的特性。
如果不同中断handler需要使用spin lock保护共享资源,对于新的内核(不区分fast handler和slow handler),所有handler都是关闭中断的,因此使用spin lock不需要关闭中断的配合。
bottom half又分成softirq和tasklet,同一种softirq会在不同的CPU上并发执行,因此如果某个驱动中的softirq的handler中会访问某个全局变量,对该全局变量是需要使用spin lock保护的,不用配合disable CPU中断或者bottom half。
tasklet更简单,因为同一种tasklet不会多个CPU上并发。
实现
我们首先定义描述自旋锁的结构体arch_spinlock_t。
typedef struct {
union {
unsigned int slock;
struct __raw_tickets {
unsigned short owner;
unsigned short next;
} tickets;
};
} arch_spinlock_t;
如上面的原理描述,我们需要两个计数,分别是owner和next。slock所占内存区域覆盖owner和next(据说C语言学好的都能看得懂)。下面实现申请锁操作 arch_spin_lock。
static inline void arch_spin_lock(arch_spinlock_t *lock) {
arch_spinlock_t old_lock;
old_lock.slock = lock->slock; /* 1 */
lock->tickets.next++; /* 2 */
while (old_lock.tickets.next != old_lock.tickets.owner) {
/* 3 */
old_lock.tickets.owner = lock->tickets.owner; /* 4 */
}
}
- 继续上面的举例。顾客从取号机器得到排队号。
- 取号机器更新下个顾客将要拿到的排队号。
- 看一下显示屏,判断是否轮到自己了。
- 一直盯着显示屏对比是不是轮到自己了。
释放锁的操作就非常简单了。还记得上面银行办理业务的例子吗?释放锁的操作仅仅是显示屏上面的排队号加1。我们仅仅需要将owner计数加1即可。arch_spin_unlock实现如下。
static inline void arch_spin_unlock(arch_spinlock_t *lock) {
lock->tickets.owner++;
}
信号量(semaphore)
信号量又称为信号灯,它是用来协调不同进程间的数据对象的,而最主要的应用是共享内存方式的进程间通信。本质上,信号量是一个计数器,它用来记录对某个资源(如共享内存)的存取状况。它负责协调各个进程,以保证他们能够正确、合理的使用公共资源。它和spin lock最大的不同之处就是:无法获取信号量的进程可以睡眠,因此会导致系统调度。一般说来,为了获得共享资源,进程需要执行下列操作:
(1) 测试控制该资源的信号量。
(2) 若此信号量的值为正,则允许进行使用该资源。进程将信号量减1。
(3) 若此信号量为0,则该资源目前不可用,进程进入睡眠状态,直至信号量值大于0,进程被唤醒,转入步骤(1)。
(4) 当进程不再使用一个信号量控制的资源时,信号量值加1。如果此时有进程正在睡眠等待此信号量,则唤醒此进程。
维护信号量状态的是Linux内核操作系统而不是用户进程。我们可以从头文件/usr/src/linux/include/linux/sem.h 中看到内核用来维护信号量状态的各个结构的定义。信号量是一个数据集合,用户可以单独使用这一集合的每个元素。
信号量(semaphore)是进程间通信处理同步互斥的机制。是在多线程环境下使用的一种措施,它负责协调各个进程,以保证他们能够正确、合理的使用公共资源。它和spin lock最大的不同之处就是:无法获取信号量的进程可以睡眠,因此会导致系统调度。
原理
信号量一般可以用来标记可用资源的个数。
举2个生活中的例子:
- 我们要坐火车从南京到新疆,这个’任务’特别的耗时,只能在车上等着车到站,但是我们没有必要一直睁着眼睛等着车到站,最好的情况就是我们上车就直接睡觉,醒来就到站,这样从人(用户)的角度来说,体验是最好的,对比于进程,程序在等待一个耗时的任务的时候,没有必须要占用CPU,可以暂停当前任务使其进入休眠状态,当等待的事件发生之后再由其他任务唤醒,这种场景采用信号量比较合适。
- 我们在等待电梯、等待洗手间,这种场景需要等待的事件并不是很多,如果我们还要找个地方睡一觉,然后等电梯到了或者洗手间可以用了再醒来,那很显然这也没有必要,我们只需要排好队,刷一刷抖音就可以了,对比于计算机程序,比如驱动在进入中断例程,在等待某个寄存器被置位,这种场景需要等待的时间很短暂,系统开销远小于进入休眠的开销,所以这种场景采用自旋锁比较合适。
实现
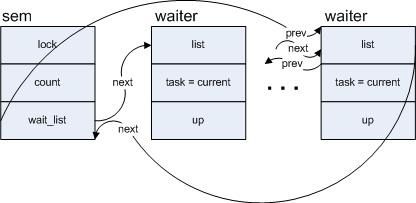
为了记录可用资源的数量,我们肯定需要一个count计数,标记当前可用资源数量。当然还要一个可以像图书管理员一样的笔记本功能。用来记录等待借书的同学。所以,一个双向链表即可。因此只需要一个count计数和等待进程的链表头即可。描述信号量的结构体如下。
struct semaphore {
unsigned int count;
struct list_head wait_list;
};
在Linux中,每个进程就相当于是每个借书的同学。通知一个同学,就相当于唤醒这个进程。因此,我们还需要一个结构体记录当前的进程信息(task_struct)。
struct semaphore_waiter {
struct list_head list;
struct task_struct *task;
};
struct semaphore_waiter的list成员是当进程无法获取信号量的时候挂入semaphore的wait_list成员。task成员就是记录后续被唤醒的进程信息。
将当前进程赋给task,并利用其list成员将该变量的节点加入到以sem中的wait_list为头部的一个列表中,假设有多个进程在sem上调用down_interruptible,则sem的wait_list上形成的队列如下图:
(注:将一个进程阻塞,一般的经过是先把进程放到等待队列中,接着改变进程的状态,比如设为TASK_INTERRUPTIBLE,然后调用调度函数schedule(),后者将会把当前进程从cpu的运行队列中摘下)
(3)试图去获得一个信号量,如果没有获得,函数立刻返回1而不会让当前进程进入睡眠状态。
一切准备就绪,现在就可以实现信号量的申请函数。
void down(struct semaphore *sem) {
struct semaphore_waiter waiter;
if (sem->count > 0) {
sem->count--; /* 1 */
return;
}
waiter.task = current; /* 2 */
list_add_tail(&waiter.list, &sem->wait_list); /* 2 */
schedule(); /* 3 */
}
- 如果信号量标记的资源还有剩余,自然可以成功获取信号量。只需要递减可用资源计数。
- 既然无法获取信号量,就需要将当前进程挂入信号量的等待队列链表上。
- schedule()主要是触发任务调度的示意函数,主动让出CPU使用权。在让出之前,需要将当前进程从运行队列上移除。
释放信号的实现也是比较简单。实现如下。
void up(struct semaphore *sem) {
struct semaphore_waiter waiter;
if (list_empty(&sem->wait_list)) {
sem->count++; /* 1 */
return;
}
waiter = list_first_entry(&sem->wait_list, struct semaphore_waiter, list);
list_del(&waiter->list); /* 2 */
wake_up_process(waiter->task); /* 2 */
}
- 如果等待链表没有进程,那么自然只需要增加资源计数。
- 从等待进程链表头取出第一个进程,并从链表上移除。然后就是唤醒该进程。
读写锁(read-write lock)
不管是自旋锁还是信号量在同一时间只能有一个进程进入临界区。对于有些情况,我们是可以区分读写操作的。因此,我们希望对于读操作的进程可以并发进行。对于写操作只限于一个进程进入临界区。而这种同步机制就是读写锁。读写锁一般具有以下几种性质。
- 同一时间有且仅有一个写进程进入临界区。
- 在没有写进程进入临界区的时候,同时可以有多个读进程进入临界区。
- 读进程和写进程不可以同时进入临界区。
读写锁有两种,一种是信号量类型,另一种是spin lock类型。下面以spin lock类型讲解。
原理
下面我们用厕所模型来理解读写锁。
-
我发现公司一般都会有保洁阿姨打扫厕所。如果以男厕所为例的话,我觉得男士进入厕所就相当于读者进入临界区。因为可以有多个男士进厕所。而保洁阿姨进入男士厕所就相当于写者进入临界区。
-
假设A男士发现保洁阿姨不在打扫厕所,就进入厕所。随后B和C同时也进入厕所。
-
然后保洁阿姨准备打扫厕所,发现有男士在厕所里面,因此只能在门口等待。
-
ABC都离开了厕所。保洁阿姨迅速进入厕所打扫。然后D男士去上厕所,发现保洁阿姨在里面。灰溜溜的出来了在门口等着。现在体会到了写者(保洁阿姨)具有排他性,读者(男士)可以并发进入临界区了吧。
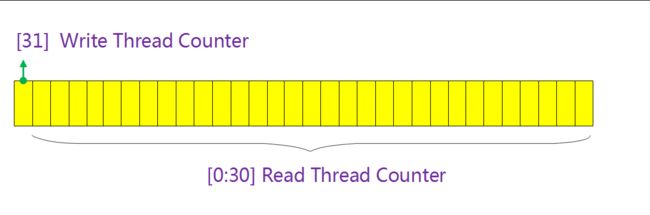
既然我们允许多个读者进入临界区,因此我们需要一个计数统计读者的个数。同时,由于写者永远只存在一个进入临界区,因此只需要一个bit标记是否有写进程进入临界区。所以,我们可以将两个计数合二为一。只需要1个unsigned int类型即可。最高位(bit31)代表是否有写者进入临界区,低31位(0~30bit)统计读者个数。
实现
描述读写锁只需要1个变量即可,因此我们可以定义读写锁的结构体如下。
typedef struct {
volatile unsigned int lock;
} arch_rwlock_t;
既然区分读写操作,因此肯定会有两个申请锁函数,分别是读和写。首先,我们看一下read_lock操作的实现。
static inline void arch_read_lock(arch_rwlock_t *rw)
{
unsigned int tmp;
do {
tmp = rw->lock;
tmp++; /* 1 */
} while(tmp & (1 << 31)); /* 2 */
rw->lock = tmp;
}
- 增加读者计数,最后会更新到rw->lock中。
- 更新rw->lock前提是没有写者,因此这里会判断是否有写者已经进入临界区(判断方法是rw->lock变量bit 31的值)。如果,有写者已经进入临界区,就在这里循环。一直等到写者离开。
当读进程离开临界区的时候会调用read_unlock释放锁。read_unlock实现如下。
static inline void arch_read_unlock(arch_rwlock_t *rw)
{
rw->lock--;
}
递减读者计数即可。
读操作看完了,我们看看写操作是如何实现的。arch_write_lock实现如下。
static inline void arch_write_lock(arch_rwlock_t *rw)
{
unsigned int tmp;
do {
tmp = rw->lock;
} while(tmp); /* 1 */
rw->lock = 1 << 31; /* 2 */
}
- 由于写者是排他的(读者和写者都不能有),因此这里只有rw->lock的值为0,当前的写者才可以进入临界区。
- 置位rw->lock的bit31,代表有写者进入临界区。
当写进程离开临界区的时候会调用write_unlock释放锁。write_unlock实现如下。
static inline void arch_write_unlock(arch_rwlock_t *rw)
{
rw->lock = 0;
}
同样由于写者是排他的,因此只需要将rw->lock置0即可。代表没有任何进程进入临界区。毕竟是因为同一时间只能有一个写者进入临界区,当这个写者离开临界区的时候,肯定是意味着现在没有任何进程进入临界区。
以上的代码实现其实会导致写进程饿死现象。例如,A、B、C三个进程进入读临界区,D进程尝试获得写锁,此时只能等待A、B、C三个进程退出临界区。如果在推出之前又有F、G进程进入读临界区,那么将出现D进程饿死现象。
互斥体(mutex)
互斥体实现了“互相排斥”(mutual exclusion)同步的简单形式(所以名为互斥体(mutex))。互斥体禁止多个线程同时进入受保护的代码“临界区”(critical section)。因此,在任意时刻,只有一个线程被允许进入这样的代码保护区。
任何线程在进入临界区之前,必须获取(acquire)与此区域相关联的互斥体的所有权。如果已有另一线程拥有了临界区的互斥体,其他线程就不能再进入其中。这些线程必须等待,直到当前的属主线程释放(release)该互斥体。
什么时候需要使用互斥体呢?
互斥体用于保护共享的易变代码,也就是,全局或静态数据。这样的数据必须通过互斥体进行保护,以防止它们在多个线程同时访问时损坏。
前文提到的semaphore在初始化count计数的时候,可以分为计数信号量和互斥信号量(二值信号量)。mutex和初始化计数为1的二值信号量有很大的相似之处。他们都可以用做资源互斥。但是mutex却有一个特殊的地方:只有持锁者才能解锁。但是,二值信号量却可以在一个进程中获取信号量,在另一个进程中释放信号量。如果是应用在嵌入式应用的RTOS,针对mutex的实现还会考虑优先级反转问题。
原理
既然mutex是一种二值信号量,因此就不需要像semaphore那样需要一个count计数。由于mutex具有“持锁者才能解锁”的特点,所以我们需要一个变量owner记录持锁进程。释放锁的时候必须是同一个进程才能释放。当然也需要一个链表头,主要用来便利睡眠等待的进程。原理和semaphore及其相似,因此在代码上也有体现。
实现
mutex的实现代码和Linux中实现会有差异,但是依然可以为你呈现设计的原理。下面的设计代码更像是部分RTOS中的代码。mutex和semaphore一样,我们需要两个类似的结构体分别描述mutex。
struct mutex_waiter {
struct list_head list;
struct task_struct *task;
};
struct mutex {
long owner;
struct list_head wait_list;
};
struct mutex_waiter的list成员是当进程无法获取互斥量的时候挂入mutex的wait_list链表。
首先实现申请互斥量的函数。
void mutex_take(struct mutex *mutex)
{
struct mutex_waiter waiter;
if (!mutex->owner) {
mutex->owner = (long)current; /* 1 */
return;
}
waiter.task = current;
list_add_tail(&waiter.list, &mutex->wait_list); /* 2 */
schedule(); /* 2 */
}
- 当mutex->owner的值为0的时候,代表没有任何进程持有锁。因此可以直接申请成功。然后,记录当前申请锁进程的task_struct。
- 既然不能获取互斥量,自然就需要睡眠等待,挂入等待链表。
互斥量的释放代码实现也同样和semaphore有很多相似之处。
int mutex_release(struct mutex *mutex)
{
struct mutex_waiter *waiter;
if (mutex->owner != (long)current) /* 1 */
return -1;
if (list_empty(&mutex->wait_list)) {
mutex->owner = 0; /* 2 */
return 0;
}
waiter = list_first_entry(&mutex->wait_list, struct mutex_waiter, list);
list_del(&waiter->list);
mutex->owner = (long)waiter->task; /* 3 */
wake_up_process(waiter->task); /* 4 */
return 0;
}
- mutex具有“持锁者才能解锁”的特点就是在这行代码体现。
- 如果等待链表没有进程,那么自然只需要将mutex->owner置0,代表没有锁是释放状态。
- mutex->owner的值改成当前可以持锁进程的task_struct。
- 从等待进程链表取出第一个进程,并从链表上移除。然后就是唤醒该进程。
获取更多关于Linux的资料,请关注公众号「一口Linux」