隐马尔可夫模型(三)——鲍姆-韦尔奇算法(Baum-Welch算法)
一、问题回顾
模型参数的学习问题。即给定观测序列O={o1,o2,…oT},估计模型λ=(A,B,Π)的参数。这个问题的求解需要用到鲍姆-韦尔奇算法,我会在隐马尔可夫模型系列的第三篇博客中讲解,这个问题是HMM模型三个问题中最复杂的。
鲍姆-韦尔奇算法本质上就是EM算法,只不过它比EM算法出来的早,所以这里继续称它为鲍姆-韦尔奇算法。
二、监督学习算法求解模型参数
监督学习算法适用于观测序列和状态序列都已知的情况下,因为需要大量的训练数据,而人工标注训练数据的代价很高,所以该方法不是很常用。
假设训练数据为S对长度为 T 的状态序列 I = (i1, i2, … , iT)及其观测序列 O = (o1, o2, … , oT)组成的集合{(I1, O1), (I2, O3), … , (Is, Os)},其中所有可能的状态集合为Q = {q1, q2, … , qN},所有可能的观测集合为V = {v1, v2, … , vM}。
初始状态概率分布Π:
Π =[ πi ]N
取 I1 到 Is 这S个状态序列的 i1时刻的状态,组成一个长度为S的初始状态序列 C = (c11, c21, … , cs1),其中ck1表示 Ik 这个状态序列在时刻 1 时的状态。
假设C( i )表示初始状态序列 C 中 状态 qi 出现的次数,则 πi 等于:

状态转移概率矩阵A:
统计 I1 到 Is 这S个状态序列中从状态 qi 转移到状态 qj 的次数,用Aij来表示。则可得:

所以得:
A = [aij]N×N
观测生成概率矩阵B:
统计 (I1, O1) 到 (Is, Os) 这S对状态序列—观测序列中状态 qj 生成观测 vk 的次数,用Bjk来表示。则可得:

三、非监督学习算法求解模型参数
此处的非监督学习算法也就是本文打算重点讲解的鲍姆-韦尔奇算法。之所以说它是非监督学习算法,是因为鲍姆-韦尔奇算法求解模型参数时只用到了观测序列,而不用状态序列。
已知条件:
假设训练数据是长度为 T 的观测序列 O = (o1, o2, … , oT),所有可能的状态集合为Q = {q1, q2, … , qN},所有可能的观测集合为V = {v1, v2, … , vM}。
未知条件:
假设长度为 T 的观测序列 O = (o1, o2, … , oT) 所对应的状态序列为 I = (i1, i2, … , iT),它是未知的。
鲍姆-韦尔奇算法的原理:
鲍姆-韦尔奇算法使用的就是EM算法的原理,那么在第 h+1 次迭代时我们需要在E步求出联合分布P(O,I;λ)基于条件概率P(I | O;λ(h))的期望,其中λ(h)为第 h 次迭代时的模型参数,然后在M步最大化这个期望,就能得到更新的模型参数λ,它就是 h+1 次迭代得到的模型参数。接着不停的进行EM迭代,直到模型参数的值收敛为止。
-
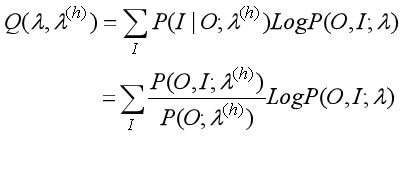
首先来看看E步, 联合分布P(O,I;λ)基于条件概率P(I | O;λ(h))的期望表达式为:

-
在M步,我们极大化上式,然后得到更新后的模型参数如下:

通过不断的E步和M步的迭代,直到λ(h+1)收敛。下面我们来看看鲍姆-韦尔奇算法的推导过程。
鲍姆-韦尔奇算法的推导:
已知条件:
假设训练数据是长度为 T 的观测序列 O = (o1, o2, … , oT),所有可能的状态集合为Q = {q1, q2, … , qN},所有可能的观测集合为V = {v1, v2, … , vM}。
未知条件:
假设长度为 T 的观测序列 O = (o1, o2, … , oT) 所对应的状态序列为 I = (i1, i2, … , iT),它是未知的。
模型参数:
λ=(A,B,Π)
首先来计算一下联合分布P(O, I;λ)的表达式:
![]()
求Q函数的表达式:
去掉常数P(O;λ(h)),等价与求下式的极大化:

将P(O, I;λ)带入上式得最终的Q函数表达式为:

接下来极大化Q函数,求模型参数A,B,Π:
因为参数Π,B,A分别包含在Q函数的三个子式中,所以我们分别对Q函数的三个子式进行极大化来求参数。
(1)极大化第一个子式,求 πi 的更新公式
先化简一下:

因为 πi有约束,即 π1+π2+…+πN = 1, 所以求出化简后的第一个子式的拉格朗日函数:

拉格朗日函数对 πi 求导并令导数等于零得:
P(O,i1= qi;λ(h+1)) + γπi = 0 (A式)
两边同时对 i 求累加和得:

将 γ 带入A式中得:

(2)极大化第二个子式,求 bj(k) 的更新公式
先化简一下:

bj(k)同样有约束条件,即bj(1) + bj(2) + … + bj(M) = 1,所以求出化简后的第二个子式的拉格朗日函数:

拉格朗日函数对 bj(k) 求导并令导数等于零得:
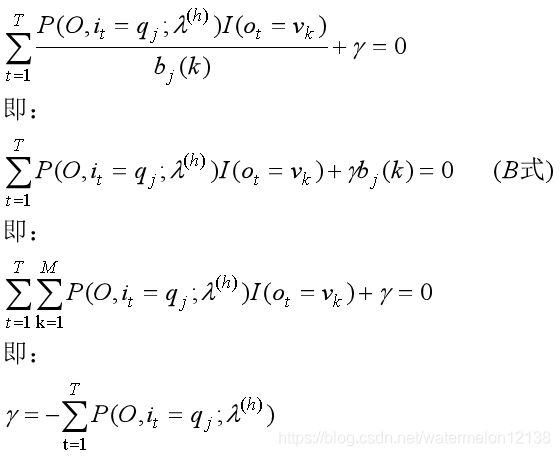
其中 I(ot = vk) 是指示函数。
将 γ 带入B式中得:

(3)极大化第三个子式,求 aij 的更新公式
这也是最麻烦的一步,坚持一下!
先化简第三个子式:

aij也有约束条件,即ai1 + ai2 + … + aiN = 1,所以也要求出化简后的第三个子式的拉格朗日函数,然后拉格朗日函数再对 aij 求导数并令导数等于零。
这里就不再赘述了,直接上aij的更新公式:

一些概率的计算:
大家是不是也发现 πi, aij, bj(k)的更新公式比较繁重,所以这里介绍两种概率的记法,用此来简化 πi, aij, bj(k)的更新公式。
(1) 用 γt( i ) 表示在观测序列 O 给定的条件下,时刻 t 处于状态 qi 的概率,即

γt( i ) 也可以用前向概率和后向概率表示如下:

(2) 用 ξt( i, j )表示在观测序列 O 给定的条件下,时刻 t 处于状态 qi 且时刻 t+1 处于 qj的概率,即

ξt( i, j ) 也可以用前向概率和后向概率表示如下:

综上所述 πi, aij, bj(k)的更新公式可以写为:

鲍姆-韦尔奇算法流程:
输入:观测序列O = (o1, o2, … , oT)
输出:模型参数
(1)初始化
对于h=0,初始化πi(0), aij(0), bj(k)(0),得到模型λ(0) = (Π(0), A(0), B(0))。
(2)对 h = 1, 2, 3…,迭代更新参数:

其中上面各式的右端在模型参数λ(h) = (Π(h), A(h), B(h))和观测序列条件O的条件下计算。
(3)直到模型参数收敛,停止迭代。