教程:Python Open3d 完成 ICP 点云配准
Python Open3d 完成 ICP 点云配准
关于Open3d
Open3D 是一个在Python和C++平台上的三维数据处理与可视化库。它由 Qian-Yi Zhou,Jaesik Park, 以及 Vladlen Koltun 共同完成。其中 Zhou 博士在中国清华大学取得硕士学位,并分别在 USC 和Stanford 取得了博士以及博士后学位,目前在在旧金山的 Forma 公司担任首席研发官。Open3D目前支持 Windows, OSX, 和 Linux 平台。
三维点云配准配准
完成配准的演示:
读取数据
这里是本次配准用到的数据,可以下载之后跟着我使用:点云数据
为了完成点云配准,我们需要做的第一步当然是读入我们需要进行配准的两个点云,我们新建一个python文件,将它命名为 display_pcd.py, 并输入以下代码:
import open3d as o3d
#读取电脑中的 ply 点云文件
source = o3d.read_point_cloud("plys/6.ply") #source 为需要配准的点云
target = o3d.read_point_cloud("plys/0.ply") #target 为目标点云
#为两个点云上上不同的颜色
source.paint_uniform_color([1, 0.706, 0]) #source 为黄色
target.paint_uniform_color([0, 0.651, 0.929])#target 为蓝色
#创建一个 o3d.visualizer class
vis = o3d.visualization.Visualizer()
vis.create_window()
#将两个点云放入visualizer
vis.add_geometry(source)
vis.add_geometry(target)
#让visualizer渲染点云
vis.update_geometry()
vis.poll_events()
vis.update_renderer()
vis.run()
在以上的代码中,o3d.visualization.visualizer 是一个非常常用的简单的查看点云的类,它接受的输入参数是一个list,这个list里面需要包括你想查看的点云。
运行以上代码,我们得到配准前的两个点云:

每次visualizer 进行渲染都会根据点云的大小和位置自动初始化一个视角,上面一张图是它自己初始化的,我们通过滚动鼠标放大之后即可以看到下面的图:

所以这里需要大家自己用鼠标将视角调到一个自己觉得舒适的地方,然后在屏幕中按下 crtl + c, 这样open3d就会保存下你刚刚的视角。当你重新进入visualizer,现实点云的时候,只要按下 ctrl + v 就可以回到之前你保存的视角。
数据处理
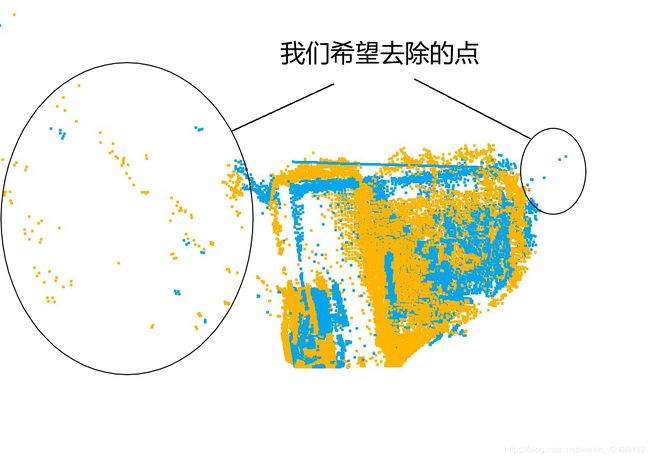
在进行正式配准之前我们还需要对点云做以下处理:特例去除 (outlier removal)。 目前大部分深度摄像头所拍摄的点云图都带有噪音,以及不存在的点,大多因为生产误差以及摄像头本身就有的噪声,在配准的时候我们不希望包括这些因为误差被记录的点,所以为了提高配准的效率以及准确率,我们要先将这些特例点去除。
我们打开一个新的python文件,将它命名为 outlier_removal.py,并输入以下代码:
import open3d as o3d
#读取电脑中的 ply 点云文件
source = o3d.read_point_cloud("plys/6.ply") #source 为需要配准的点云
target = o3d.read_point_cloud("plys/0.ply") #target 为目标点云
#为两个点云上上不同的颜色
source.paint_uniform_color([1, 0.706, 0]) #source 为黄色
target.paint_uniform_color([0, 0.651, 0.929])#target 为蓝色
#为两个点云分别进行outlier removal
processed_source, outlier_index = o3d.geometry.radius_outlier_removal(source,
nb_points=16,
radius=0.5)
processed_target, outlier_index = o3d.geometry.radius_outlier_removal(target,
nb_points=16,
radius=0.5)
#o3d.geometry.radius_outlier_removal 这个函数是使用球体判断一个特例的函数,它需要
#两个参数:nb_points 和 radius。 它会给点云中的每个点画一个半径为 radius 的球体,如
#果在这个球体中其他的点的数量小于 nb_points, 这个算法会将这个点判断为特例,并删除。
#显示两个点云
#o3d.visuzlization_draw_geometries 是一个更加简单的显示点云的函数,它不需要创建
#一个visualizer类,直接调用这个函数,在参数里放一个包含你想显示的点云的list就行了。
o3d.visualization.draw_geometries([processed_source,processed_target])
运行以上代码,我们获得以下点云,是不是整洁很多呢?

开始配准
ICP (iterative closest point), 是对点云配准目前最常用的方法。其原理就是不断的对一个点云进行转换,并计算其中每个点与另外一个点云集的距离,将它转换成一个 fitness score。然后不断地变换知道将这个总距离降到最低。一般来说icp都是经过全局配准之后运用的,也就是说两个点云要先被粗略地配准,然后icp会完成配准的微调。
现在我们已经知道如何显示和处理我们的点云了,下一步就是集成我们所学的,并对它们进行配准。我们新创建一个python文件,管他叫做 icp_registration.py,然后输入以下代码。
import open3d as o3d
import numpy as np
#读取电脑中的 ply 点云文件
source = o3d.read_point_cloud("plys/6.ply") #source 为需要配准的点云
target = o3d.read_point_cloud("plys/0.ply") #target 为目标点云
#为两个点云上上不同的颜色
source.paint_uniform_color([1, 0.706, 0]) #source 为黄色
target.paint_uniform_color([0, 0.651, 0.929])#target 为蓝色
#为两个点云分别进行outlier removal
processed_source, outlier_index = o3d.geometry.radius_outlier_removal(source,
nb_points=16,
radius=0.5)
processed_target, outlier_index = o3d.geometry.radius_outlier_removal(target,
nb_points=16,
radius=0.5)
threshold = 1.0 #移动范围的阀值
trans_init = np.asarray([[1,0,0,0], # 4x4 identity matrix,这是一个转换矩阵,
[0,1,0,0], # 象征着没有任何位移,没有任何旋转,我们输入
[0,0,1,0], # 这个矩阵为初始变换
[0,0,0,1]])
#运行icp
reg_p2p = o3d.registration.registration_icp(
processed_source, processed_target, threshold, trans_init,
o3d.registration.TransformationEstimationPointToPoint())
#将我们的矩阵依照输出的变换矩阵进行变换
print(reg_p2p)
processed_source.transform(reg_p2p.transformation)
#创建一个 o3d.visualizer class
vis = o3d.visualization.Visualizer()
vis.create_window()
#将两个点云放入visualizer
vis.add_geometry(processed_source)
vis.add_geometry(processed_target)
#让visualizer渲染点云
vis.update_geometry()
vis.poll_events()
vis.update_renderer()
vis.run()
运行以上代码,我们得到

以及
console: registration::RegistrationResult with fitness = 1.000000, inlier_rmse = 0.093900, and correspondence_set size of 12849
在返回的结果中,
fitness 算法对这次配准的打分,
inlier_rmse 表示的是 root of covariance, 也就是所有匹配点之间的距离的总和除以所有点的数量的平方根,可以用以下数学公式表达:
r m s e = ∑ i = 1 n a i − b i n . rmse = \sqrt{\frac{\sum_{i=1}^{n} a_i - b_i}{n}}. rmse=n∑i=1nai−bi.
其中,a为目标矩阵,b为被配准矩阵,n为b的点数量。
correspondence_size 代表配准后 点 云 a 点云_a 点云a 与 点 云 b 点云_b 点云b 中吻合的点的数量。
通过视觉上看我们配准的结果,以及参数上看配准结果,这次的配准还算挺成功的。
关于我
好了,我们这次点云配准就完成了,希望朋友们学到了点什么,如果大家对这篇文章有问题或者有和我想说的话欢迎在下方评论,私信我,或者email [email protected]。 谢谢阅读我的文章!