【python算法】图的遍历与最小路径
数据结构中,图的应用场景非常广泛,与我们的生活息息相关,在基于图做的应用中,比较典型的有:在交通规划中的最小生成树,用于导航的最短路径等。比如下图
这里,我们介绍邻接表表示方法。
在表示图的时,我们一般使用如下的两个实例属性,表示邻接表的字典nodeNeighbors,标志是否已访问的字典visited。
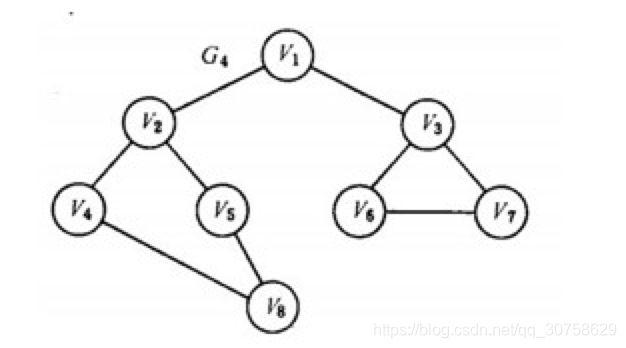
针对如下的图:来实现广度优先遍历以及深度优先遍历还用求最短路径:

简述思想:
1.定义一个图的类class Graph,定义nodeNeighbors和visited;nodeNeighbors表示:存储每一个节点可以到达的所有节点和权重,visited记录节点是否被访问过
2.增加 添加节点,添加有权边,返回所有node的方法
添加节点:就是nodeNeighbors[node] = []
添加有权边:nodeNeighbors[u].append((v, var))
返回节点很简单:直接返回key return self.nodeNeighbors.keys()
# 定义图类
class Graph(object):
def __init__(self):
self.nodeNeighbors = {} # 存储一个节点可到达的所有节点,
# 比如上图就是self.nodeNeighbors = {1: [(2, 1), (3, 1), (5, 1)], 2: [], 3: [(4, 1)], 4: [], 5: []} key为node,元组[0]代表到达的节点,元组[1]代表权重,就是路径的大小,此处默认为1
self.visited = {} # 存储所有被访问的节点,value为True表示被访问过了 例如 {1: True, 2: True, 3: True, 5: True, 4: True}
# 添加节点
def addNode(self, node):
if node not in self.nodeNeighbors:
self.nodeNeighbors[node] = []
# 批量添加节点
def addNodes(self, nodeList):
for node in nodeList:
self.addNode(node)
# 添加有权边 例如addEdge((1, 2),1代表开始的node,2代表结束的node,var是权重,目前都默认为1
def addEdge(self, edge, var=1):
u, v = edge
if u == v: #如果起点和终点一样,就直接return
return None
if v not in [x[0] for x in self.nodeNeighbors[u]]: #self.nodeNeighbors[1]]就是[(2, 1), (3, 1), (5, 1)],x[0]就是每个可到达的node
self.nodeNeighbors[u].append((v, var))
return 1
else:
return 0
# 返回所有节点
def nodes(self):
return self.nodeNeighbors.keys()3.简述广度优先遍历方法的思想
定义queue一个队列,存储待遍历的node,先进先出
定义order,存储遍历后的结果的,最后return的是order
定义bfs函数,如果queue不为空,while循环,取出第一个node,标记为visit后,遍历nodeNeighbors[node],如果没被visit也没有夹到过queue,就增加
def breathFirthSearch(self, root=None):
queue = [] # 存储待遍历的节点对象,利用先进先出的方式进行广度遍历
order = [] # 存储遍历后的节点值
def bfs(): # 遍历函数
while len(queue) > 0:
node = queue.pop(0)
self.visited[node] = True # 设定队列出去的节点被遍历过
for n, v in self.nodeNeighbors[node]: #nodeNeighbors[1]]就是[(2, 1), (3, 1), (5, 1)]
# 如果当前节点不在被访问的节点中,也不再待遍历的队列中
# 则将此节点添加到带遍历队列,并且把元素值添加到order队列
# 使用2个条件的原因,在于节点虽然没有被访问,但是已经在queue里面了
if (n not in self.visited) and (n not in queue):
queue.append(n)
order.append(n)
if root:
queue.append(root)
order.append(root)
bfs()
# 如果有些节点是一些单独的节点
# 不和任何其他节点相连,就要用此循环来保证遍历到
for node in self.nodes():
if node not in self.visited:
queue.append(node)
order.append(node)
bfs()
return order4.简述深度优先遍历的思想:
运用递归,如果node没被visit,order先append(node),循环nodeNeighbors[node],如果里面的node没被visit,递归dfs(n)
def depthFirstSearch(self, root=None):
order = []
def dfs(node):
if node not in self.visited:
order.append(node)
self.visited[node] = True
for n, v in self.nodeNeighbors[node]: # ##{1:[(2:1),(3:1),(5:1)]}
# 使用递归进行深度遍历
if n not in self.visited:
dfs(n)
# 从根节点进行遍历
if root:
dfs(root)
# 如果有些节点是一些单独的节点
# 不和任何其他节点相连,就要用此循环来保证遍历到
for node in self.nodes():
if node not in self.visited:
dfs(node)
return order5.简述最短路径思路:
1.从source节点,进行广度遍历(先把source放到队列中,遍历)
while len(q) > 0:
q.append((alt,n))
2.遍历每一个节点,把source到这个节点的距离算出来 alt = distance+v
3.如果这个alt在dist字典(到source的最短距离)中没存过,就存 dist[n] = alt
4.如果alt在dist字典存过了,比较alt和dist[n]哪个更小,如果alt更小,则更新dist[n]=alt,且把n和当前到最小距离从新放在队列里
队列中基于最短距离重新做广度遍历
def shorestPath(self, source):
dist = {source:0}
q = [(0,source)]
while len(q) > 0:
distance, node = q.pop(0)
self.visited[node] = True
for n,v in self.nodeNeighbors[node]:
alt = distance + v
if n not in self.visited:
if (n not in dist) or alt < dist[n]:
dist[n] = alt
q.append((alt,n))
if n in self.visited and n in dist and alt < dist[n]:
dist[n] = alt
q.append((alt,n))
return dist
![]()