基于预测未来帧的异常事件检测
基于预测未来帧的异常事件检测Future Frame Prediction for Anomaly Detection – A New Baseline
摘要
视频异常事件检测的目标是识别出那些不服从期望行为的。在本文中,作者提出了一个基于预测未来帧(future frame prediction)的架构,此外,为了更好地预测未来的帧,除了通常使用的空间约束(spatial constrains),i.e. intensity constrain和gradient constrain,作者还加上了时序约束(temporal constrain),i.e.光流场约束(optical flow constrain)。作者分别在几个公开数据集和一个toy数据集上进行了实验,代码开源在github上:https://github.com/StevenLiuWen/ano_pred_cvpr2018
1. 介绍
视频异常事件检测的目标是识别出那些不遵从从期望行为的。这个任务十分困难因为异常事件通常是一个无界的概念,我们也无法列举出所有的异常事件类别,所以基于classification的策略是不合适的。并且,我们的数据集通常也大多都是一些正常的事件,异常事件在一个视频中也是少量的帧,人工对每帧去进行标注也是不现实的。
目前有许多这方面的研究,在正常的训练数据上进行特征重建是一个常用的策略。基于特征的使用选取,现有的方法可以大致分为两类:
- 基于hand-crafted特征选取的:这种方法将视频用一些手工选取的特征进行代表,然后学习出一个正常事件的字典,从而那些异常事件在这个空间上会存在较大的reconstruction errors。
- 基于DL方法的:采用auto-encoder的结果对正常事件的pattern进行自学习,然后同样,异常事件也在最后会存在较大的reconstruction loss.但是深度神经网络的泛化能力很强,因而,就算有异常事件发生,重建loss不一定会很大。
最近,生成对抗网络(GAN)的迅速发展也对视频预测任务产生了促进。综上,作者提出了基于预测未来帧的视频异常事件检测架构,具体来说,给定一些训练video clips,模型会学习生成一个predictor,它能根据现有的视频帧预测下一正常的帧,在测试阶段,输入一些帧,模型根据已经学习到的内容同样预测下一帧,如果和预测输出的帧满足,则判定为normal的,否则判定为abnormal的。总的来说,该文章的贡献如下:
- 首次提出了这种基于future frame的架构
- 引入了基于光流场的约束(optical flow constrain)
- 在公开数据集和一个toy数据集上实验验证了该方法的有效性。
2. Related Work
2.1 基于手工特征选取的方法
基于手工特征选取的方法大都遵从以下三个模块:
- 提取特征:例如low-level的轨迹特征(trajectory features)、HOG【7】、HOF【8】等。
- 建立模型对regular patterns进行学习:Zhang等人【41】利用马尔科夫随机场,Mahadevan等人【25】利用高斯混合模型
- 识别异常事件。
2.2 基于深度学习的方法
Xu等人【40】利用multi-layer的自动编码器完成特征学习,【14】中利用3D-Conv-AE对正常帧进行建模,【5】和【23】中利用ConvLSTM-AE对appearance和motion信息的patterns进行了建模。
2.3 视频帧预测
【27】中提出了一个基于对抗学习的multi-scale network来生成视频的未来帧,这也是本文参考的一个重要文章。
3. 基于预测未来帧的异常事件检测
总体的思想是,对正常的帧的模式进行学习,然后再基于已有的帧对未来帧进行一个预测,记为prediction,如果prediction和ground truth相差很大,就视为异常事件。举例来说,如果有一个视频,开始一部分都是人群在正常过马路,模型能实时地对下一帧进行预测,如果突然有一辆卡车出现,而模型预测的帧任然是人群过马路,这样产生出入较大,就视为异常事件。之前的大多工作也只考虑到了上述的appearance信息(一辆卡车突然冲入人群),但是作者任务motion信息同样重要(例如一个扒手经过一个人),所以提出了optical flow constant。总体的框架如下图所示:
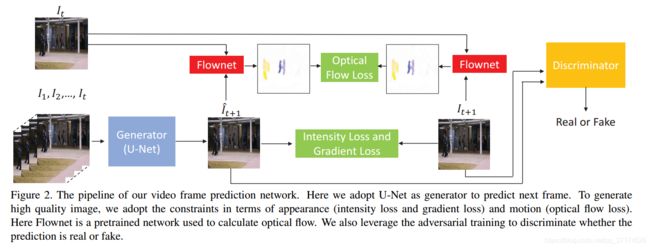
3.1 未来帧预测
Generator部分采用的是类似U-Net的结构,如下所示:

We sequentially stack all these frames and use them to predict a future frame I t + 1 {I}_{t+1} It+1
至于具体是怎么操作这些前序帧的,还待看代码进一步了解。
3.2 各种约束
数学公式描述,给定一些连续帧 I 1 , I 2 , … , I t I_{1}, I_{2}, \ldots, I_{t} I1,I2,…,It,预测出的帧记为 I ^ t + 1 \hat{I}_{t+1} I^t+1,ground truth帧为 I t + 1 {I}_{t+1} It+1,我们最小化两种之间的intensity distance和gradient distance,也就是之前提到的appearance constrians,分别按下式计算:
L i n t ( I ^ , I ) = ∥ I ^ − I ∥ 2 2 L_{i n t}(\hat{I}, I)=\|\hat{I}-I\|_{2}^{2} \\ Lint(I^,I)=∥I^−I∥22
L g d ( I ^ , I ) = ∑ i , j ∥ I ^ i , j − I ^ i − 1 , j ∣ − ∣ I i , j − I i − 1 , j ∣ ∥ 1 + ∥ I ^ i , j − I ^ i , j − 1 ∣ − ∣ I i , j − I i , j − 1 ∣ ∥ 1 \begin{aligned} L_{g d}(\hat{I}, I)=& \sum_{i, j}\left\|\hat{I}_{i, j}-\hat{I}_{i-1, j}|-| I_{i, j}-I_{i-1, j} |\right\|_{1} \\ &+\left\|\hat{I}_{i, j}-\hat{I}_{i, j-1}|-| I_{i, j}-I_{i, j-1} |\right\|_{1} \end{aligned} Lgd(I^,I)=i,j∑∥∥∥I^i,j−I^i−1,j∣−∣Ii,j−Ii−1,j∣∥∥∥1+∥∥∥I^i,j−I^i,j−1∣−∣Ii,j−Ii,j−1∣∥∥∥1
gradient constrain目的就是保证在prediction中的每个像素,让它和它左边和它上面的像素之前的梯度保持和gound truth中的情况一致。
To preserve the temporal coherence between neighboring frames, we enforce the optical flow between I t + 1 I_{t+1} It+1 and I t I_{t} It and that between I ^ t + 1 \hat{I}_{t+1} I^t+1and I t I_{t} It to be close.
optical flow constrain数学公式表示如下:
L o p ( I ^ t + 1 , I t + 1 , I t ) = ∥ f ( I ^ t + 1 , I t ) − f ( I t + 1 , I t ) ∥ 1 L_{o p}\left(\hat{I}_{t+1}, I_{t+1}, I_{t}\right)=\left\|f\left(\hat{I}_{t+1}, I_{t}\right)-f\left(I_{t+1}, I_{t}\right)\right\|_{1} Lop(I^t+1,It+1,It)=∥∥∥f(I^t+1,It)−f(It+1,It)∥∥∥1
其中,optical flow的求解用到了Flownet【40】,这是一个基于CNN的光流场estimator。
3.4 对抗训练
根据GAN的思路,有一个生成器G和判别器D,当对抗训练收敛后,G可以生成一些图片,让判别器D判别为真的(其实是假的),而判别器又是可以对图片进行判别是真还是假。于是训练分为两大步骤:
- 一、训练判别器D
判别器的目的就是把 I t + 1 I_{t+1} It+1 分类为1,把 I ^ t + 1 \hat{I}_{t+1} I^t+1 分类为0,这里的1和0分别代表正常和异常帧。在训练D的时候,fix生成器G的参数,文中用的是MSE损失函数:
L a d v D ( I ^ , I ) = ∑ i , j 1 2 L M S E ( D ( I ) i , j , 1 ) + ∑ i , j 1 2 L M S E ( D ( I ^ ) i , j , 0 ) \begin{aligned} L_{a d v}^{\mathcal{D}}(\hat{I}, I) &=\sum_{i, j} \frac{1}{2} L_{M S E}\left(\mathcal{D}(I)_{i, j}, 1\right) \\ &+\sum_{i, j} \frac{1}{2} L_{M S E}\left(\mathcal{D}(\hat{I})_{i, j}, 0\right) \end{aligned} \\ LadvD(I^,I)=i,j∑21LMSE(D(I)i,j,1)+i,j∑21LMSE(D(I^)i,j,0)
于是整个判别器D的Object function为:
L D = L a d v D ( I ^ t + 1 , I t + 1 ) L_{\mathcal{D}}=L_{a d v}^{\mathcal{D}}\left(\hat{I}_{t+1}, I_{t+1}\right) LD=LadvD(I^t+1,It+1)
这里注意一下,为什么 D ( I ) D(I) D(I)还会有下标 i , j {i, j} i,j呢?是不是觉得有点奇怪?原因是文中follow了【17】的工作,采用了一个patch discriminator,也就是说可以对一张大的图片进行分割(例如3*3的小patches),然后把整个图片送入判别器discriminator,输出每个patch对应的类别。所以就 i , j {i, j} i,j其实是每个小patch的索引啦。
- 二、训练生成器G
生成器G的目标是生成一些帧,让判别器判别为1,也就是正常帧,在训练G的时候,fix判别器D的参数:
L a d v G ( I ^ ) = ∑ i , j 1 2 L M S E ( D ( I ^ ) i , j , 1 ) L_{a d v}^{\mathcal{G}}(\hat{I})=\sum_{i, j} \frac{1}{2} L_{M S E}\left(\mathcal{D}(\hat{I})_{i, j}, 1\right) LadvG(I^)=i,j∑21LMSE(D(I^)i,j,1)
于是整个生成器G的Object function为:
L G = λ int L int ( I ^ t + 1 , I t + 1 ) + λ g d L g d ( I ^ t + 1 , I t + 1 ) + λ o p L o p ( I ^ t + 1 , I t + 1 , I t ) + λ a d v L a d v G ( I ^ t + 1 ) \begin{array}{l}{L_{\mathcal{G}}=\lambda_{\text {int}} L_{\text {int}}\left(\hat{I}_{t+1}, I_{t+1}\right)+\lambda_{g d} L_{g d}\left(\hat{I}_{t+1}, I_{t+1}\right)} \\ {\quad+\lambda_{o p} L_{o p}\left(\hat{I}_{t+1}, I_{t+1}, I_{t}\right)+\lambda_{a d v} L_{a d v}^{\mathcal{G}}\left(\hat{I}_{t+1}\right)}\end{array} LG=λintLint(I^t+1,It+1)+λgdLgd(I^t+1,It+1)+λopLop(I^t+1,It+1,It)+λadvLadvG(I^t+1)
λ i n t , λ g d , λ o p , λ a d v g \lambda_{int},\lambda_{gd},\lambda_{op},\lambda^{{g}}_{adv} λint,λgd,λop,λadvg分别是各部分的权重,具体取值参见论文,经验值。
在训练的适合,把像素值normalize到 [ − 1 , 1 ] [-1,1] [−1,1],每帧的大小是256*256,和【27】类似,t取值为4,也就是说每个video clip一共有5帧,mini-batch size 是 4
3.6 测试数据异常检测
同样接上之前人群过马路的例子,我们说,只要当预测出来的帧和真实的帧相差很大,我们就认为是异常了,那么,度量两张图片之间的差异程度有什么方法呢? 欧氏距离或PSNR,本文就选取了PSNR(Peak Signal to Noise Ratio),定义如下:
P S N R ( I , I ^ ) = 10 log 10 [ max j ] 2 1 N ∑ i = 0 N ( I i − I ^ i ) 2 P S N R(I, \hat{I})=10 \log _{10} \frac{\left[\max _{j}\right]^{2}}{\frac{1}{N} \sum_{i=0}^{N}\left(I_{i}-\hat{I}_{i}\right)^{2}} PSNR(I,I^)=10log10N1∑i=0N(Ii−I^i)2[maxj]2
于是我们可以将test video中的每一帧都和对应的预测帧求一个PSNR(当然,最开始前t帧是无法求的)。PSNR越大,就表示两张图片越相似,也就是说更有可能是正常帧,为了后续更好地选取阈值,将PSNR也归一化到 [ 0 , 1 ] [0,1] [0,1]。
S ( t ) = P S N R ( I t , I ^ t ) − min t P S N R ( I t , I ^ t ) max t P S N R ( I t , I ^ t ) − min t P S N R ( I t , I ^ t ) S(t)=\frac{P S N R\left(I_{t}, \hat{I}_{t}\right)-\min _{t} P S N R\left(I_{t}, \hat{I}_{t}\right)}{\max _{t} P S N R\left(I_{t}, \hat{I}_{t}\right)-\min _{t} P S N R\left(I_{t}, \hat{I}_{t}\right)} S(t)=maxtPSNR(It,I^t)−mintPSNR(It,I^t)PSNR(It,I^t)−mintPSNR(It,I^t)
然后我们就可以给定一个阈值,例如,0.6,然后把低于0.6的全部判断为anomaly。
4. 对比实验
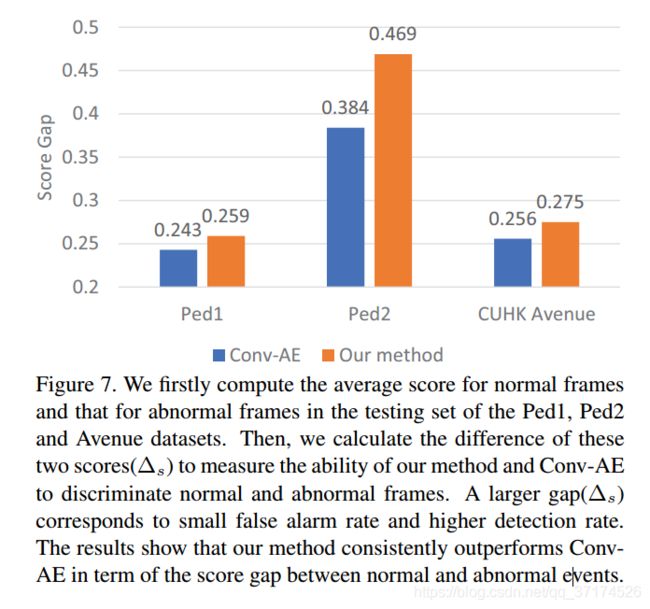
这部分作者做了比较多的对比实验,比如prediction network部分的设计,和【27】中的Beyond-MSE进行了对比;也分别比较了各个constrain和对抗训练的必要性;最后还将本文这种基于future frame prediction策略的模型和基于自编码器策略的模型(Conv-AE 【14】)做了一个综合对比,也证明本文中的方法略好。
最后是作者在一个toy数据集上进行的验证实验:

Reference
- Wen Liu∗, Weixin Luo∗, Dongze Lian, Shenghua Gaoy: Future Frame Prediction for Anomaly Detection – A New Baseline, CVPR 2018